一種六輪無人車重心調節系統及越障方法
本發明屬于涉及無人地面車輛,具體涉及了一種六輪無人車重心調節系統及越障方法。
背景技術:
1、隨著智能時代的到來,無人車在國防軍事、工業領域、探測勘測等領域得到了廣泛的應用,六輪無人車則由于其較好的越野越障性能與機動性能,在這些領域中發揮著重要作用。
2、一般的六輪無人車在其設計完成后,其重心位置是無法改變的,這將制約六輪無人車在一些特殊工況,如較寬的壕溝、較高的垂直障礙下的通過性。因此,就產生了改變重心位置來調整車輛性能的方法,如申請號為202110863176x公開的三軸無人車及其綜合車控系統、越障方法,通過調整車輛中軸的位置間接改變重心位置輔助越障,但這使得機械結構更加復雜,增加了系統的復雜度;如申請號為2021106251304公開的車輛重心調節系統及方法,只能保證重心處于低位,調節有限;如申請號為2022102341306公開的一種車輛重心調節方法、裝置、介質、系統及車輛,則采用電機驅動配重方式改變車輛重心位置,使用額外的機構不僅增加了車輛自重,還使得系統更加復雜。
技術實現思路
1、為了解決背景技術中存在的問題,本發明的目的在于提供一種六輪無人車重心調節系統及越障方法,在越障過程中通過重心的調節,輔助增強越障能力。
2、本發明采用的技術方案為:
3、一、一種六輪無人車重心調節系統:
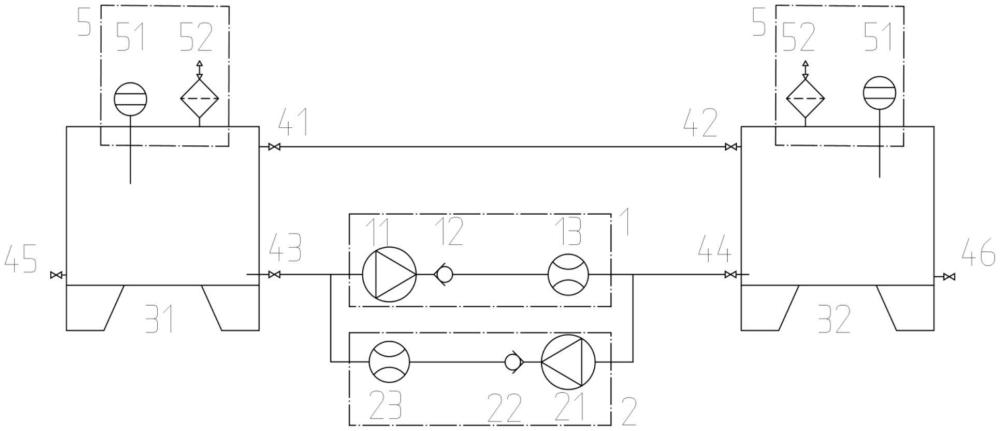
4、包括第一冷卻水箱、第二冷卻水箱、水泵模塊和水箱附件,第一冷卻水箱和第二冷卻水箱分別安裝在六輪無人車的前部和后部,第一冷卻水箱和第二冷卻水箱之間通過水泵模塊連接,水泵模塊中設置有用于控制水量的流量計,進而實現六輪無人車重心位置的調節,第一冷卻水箱和第二冷卻水箱的頂部均安裝有水箱附件。
5、所述的水泵模塊主要由第一水泵組和第二水泵組并聯組成,第一水泵組包括第一水泵、第一單向閥和第一流量計,第一水泵的入口與第一冷卻水箱連接,第一水泵的出口通過第一單向閥與第一流量計的一端連接,第一流量計的另一端與第二冷卻水箱連接;第二水泵組包括第二水泵、第二單向閥和第二流量計,第二水泵的入口與第二冷卻水箱連接,第二水泵的出口通過第二單向閥與第二流量計的一端連接,第二流量計的另一端與第一冷卻水箱連接,第一流量計和第二流量計用于監控水泵模塊中的液體流量,進而通過第一冷卻水箱和第二冷卻水箱的重量調控六輪無人車的重心位置。
6、所述第一冷卻水箱和第二冷卻水箱的頂部分別安裝有第一球閥和第二球閥,第一球閥和第二球閥之間通過管路連通。
7、所述的水箱附件包括液位計和空濾器,第一冷卻水箱和第二冷卻水箱的頂部均安裝有液位計和空濾器,液位計用于實時監控第一冷卻水箱和第二冷卻水箱內的液位,空濾器用于保證第一冷卻水箱和第二冷卻水箱內外氣壓平衡。
8、所述第一冷卻水箱的底部安裝有第三球閥和第五球閥,所述第二冷卻水箱的底部安裝有第四球閥和第六球閥,第一水泵組中的第一水泵入口和第二水泵組中的第二流量計均通過管道與第一冷卻水箱上的第三球閥連接,第一水泵組中的第一流量計和第二水泵組中的第二水泵入口均通過管道與第二冷卻水箱上的第四球閥連接。
9、二、一種六輪無人車重心調節越障方法,包括以下步驟:
10、步驟s1、首先,將第一冷卻水箱和第二冷卻水箱分別安裝在六輪無人車的前部和后部,然后將第一冷卻水箱和第二冷卻水箱通過水泵模塊進行連接;
11、步驟s2、將六輪無人車移動到待越障位置;
12、步驟s3、啟動水泵模塊,通過水泵模塊調控六輪無人車的重心位置,進而實現六輪無人車的跨越障礙。
13、所述步驟s3中,六輪無人車跨越的障礙包括壕溝和垂直障礙;
14、當六輪無人車待跨越的障礙為壕溝時,所述步驟s3具體為:
15、步驟s3.1、當六輪無人車的前軸跨越壕溝時,利用水泵模塊將六輪無人車的重心調整至六輪無人車的中軸與后軸之間;
16、步驟s3.2、接著,六輪無人車的前軸接觸地面,當六輪無人車的中軸跨越壕溝時,利用水泵模塊將六輪無人車的重心調整至六輪無人車的中軸位置;
17、步驟s3.3、然后六輪無人車的中軸接觸地面,當六輪無人車的后軸跨越壕溝時,利用水泵模塊將六輪無人車的重心調整至六輪無人車的前軸與中軸之間,最后完成六輪無人車的跨越壕溝。
18、當六輪無人車待跨越的障礙為垂直障礙時,所述步驟s3具體為:
19、步驟s3.1、首先,利用水泵模塊將六輪無人車的重心調整至六輪無人車的中軸與后軸之間;
20、步驟s3.2、六輪無人車的前軸懸架縮回,中軸懸架伸出,后軸懸架縮回,使得整個六輪無人車處于抬起爬升狀態,直至六輪無人車的前軸爬越障礙;
21、步驟s3.3、當六輪無人車的前軸爬越障礙后,六輪無人車的前軸懸架伸出,中軸懸架縮回,后軸懸架伸出,直至六輪無人車的中軸爬越障礙;
22、步驟s3.4、當六輪無人車的中軸爬越障礙后,利用水泵模塊將六輪無人車的重心調整至六輪無人車的前軸與中軸之間,同時六輪無人車前軸懸架、后軸懸架保持伸出狀態不變,中軸懸架伸出,直至六輪無人車的后軸爬越障礙,完成六輪無人車的跨越垂直障礙。
23、本發明為了避免使用復雜的機構實現六輪無人車的重心調整,降低系統的復雜度,通過調節六輪無人車自身的前后冷卻水箱的水量實現六輪無人車重心的調節,簡化了系統結構;同時,在越障過程中利用重心調節,增強六輪無人車越障能力。
24、本發明的有益效果是:
25、1、本發明相對于采用額外的負重與機構實現六輪無人車的重心調節,直接通過水泵來調節六輪無人車自身的前后冷卻水箱的水量實現六輪無人車重心的調節,簡化了系統結構,降低系統的復雜度。
26、2、本發明在跨越壕溝、跨越垂直障礙時,利用重心調節系統將重心調整至合適的位置,提高了六輪無人車在越障過程中的穩定性,增強了六輪無人車越障能力。
技術特征:
1.一種六輪無人車重心調節系統,其特征在于:
2.根據權利要求1所述的一種六輪無人車重心調節系統,其特征在于:
3.根據權利要求1所述的一種六輪無人車重心調節系統,其特征在于:
4.根據權利要求1所述的一種六輪無人車重心調節系統,其特征在于:
5.根據權利要求2所述的一種六輪無人車重心調節系統,其特征在于:
6.一種應用于權利要求1-5任一所述系統的六輪無人車重心調節越障方法,其特征在于,包括以下步驟:
7.根據權利要求6所述的一種六輪無人車重心調節越障方法,其特征在于:
8.根據權利要求6所述的一種六輪無人車重心調節越障方法,其特征在于:
技術總結
本發明公開了一種六輪無人車重心調節系統及越障方法。第一冷卻水箱和第二冷卻水箱分別安裝在六輪無人車的前部和后部,第一冷卻水箱和第二冷卻水箱之間通過水泵模塊連接,水泵模塊中設置有用于控制水量的流量計,進而實現六輪無人車重心位置的調節,兩個冷卻水箱頂部均安裝有水箱附件;方法包括將調節系統安裝在六輪無人車上,將六輪無人車移動到待越障位置、啟動水泵模塊,通過水泵模塊調控六輪無人車的重心位置,進而實現六輪無人車的跨越障礙。本發明通過調節六輪無人車自身的前后冷卻水箱的水量實現六輪無人車重心的調節,避免了增加額外配重與機構實現重心調節,簡化了系統結構,在越障過程中利用重心調節,增強六輪無人車越障能力。
技術研發人員:歐陽小平,褚海洋,胡華銳,陳自力,蔣昊宜,楊波
受保護的技術使用者:浙江大學
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!