一種具有海底原位鉆進功能的水下爬行機器人及方法與流程
本發明屬于水下機器人,具體涉及一種主要針對海底硬底巖石區的具有海底原位鉆進功能的水下爬行機器人及方法。
背景技術:
1、水下機器人也稱無人遙控潛水器,是一種工作于水下的極限作業機器人。水下環境惡劣危險,人的潛水深度有限,所以水下機器人已成為開發海洋的重要工具。水下爬行機器人是一種能夠在海底環境中進行貼地移動和作業的機器人,主要應用于海底表生礦產資源的精細探測、海底沉積物原位取樣、海底水下目標物的抵近觀測和水下目標物的定點布放及回收等。
2、針對硬底巖石樣品,往往通過海底拖網或水下機器人機械臂掰取較硬的巖石樣品,但這些方式仍然無法獲取海底之下一定深度的硬底巖芯。
3、現有的水下爬行機器人能夠實現海底的爬行運動,通常無法實現對海底硬底巖心的取芯,即使搭載鉆進設備,對于海底復雜地形下的硬底區進行取樣時仍會存在各種難點,例如無法穩定鉆取和多次鉆取后如何收集保存樣品,無法準確判斷取芯是否成功,導致海底原位取芯準確率低、取芯效率較為低下,鉆進穩定性差,容易造成鉆進失敗。
4、因此,亟需一種具有海底硬底沉積物原位鉆進功能的水下爬行機器人及方法,解決當前存在的技術難點。
技術實現思路
1、為解決現有主要針對海底硬底巖石區取芯過程中存在的取芯位置不準確、取芯難、收集保存難的缺陷,本發明提出一種具有海底原位鉆進功能的水下爬行機器人及方法,其方案如下:
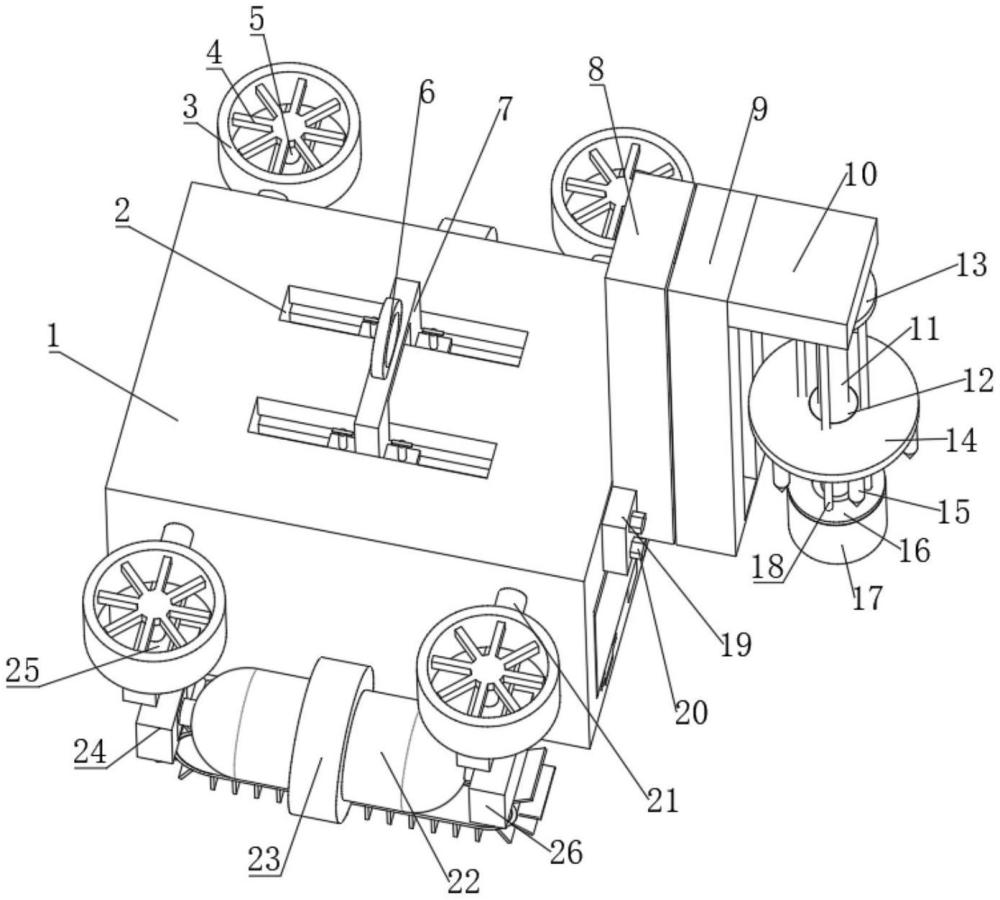
2、一方面,本發明公開了一種具有海底原位鉆進功能的水下爬行機器人,包括水下爬行機器人本體,所述水下爬行機器人本體上設有鉆進取芯機構、穩定機構和收集機構;所述鉆進取芯機構包括鉆取部件和多節升降機構,多節升降機構首端與所述水下爬行機器人本體相連,多節升降機構末端與所述鉆取部件相連,所述多節升降機構展開或者收回帶動鉆取部件上下運動;所述鉆取部件外部設置所述穩定機構,所述穩定機構與所述鉆取部件轉動連接;所述收集機構設置于所述水下爬行機器人本體內并與所述水下爬行機器人本體活動連接,所述收集機構伸出水下爬行機器人本體與鉆取部件底部緊密抵接,以收集鉆取部件的沉積物或者巖石。
3、另一方面,本發明公開了一種具有海底原位鉆進功能的水下爬行機器人的方法,基于上述的水下爬行機器人,包括以下步驟:
4、s1、通過起吊裝置連接輔助起吊機構,將所述水下爬行機器人本體吊入到水中;
5、s2、水下爬行機器人本體處于水中,升降機構運動,使得水進入到蓄水管中,整體重量增加,使得所述水下爬行機器人本體下沉;
6、s3、水下爬行機器人本體下沉到海底后,運動機構運動,帶動水下爬行機器人本體在海底運動;
7、s4、水下爬行機器人運動到鉆取的位置后,鉆進取芯機構運動,對海底的沉積物或者巖石進行鉆進取芯,通過多節升降機構實現對鉆進取芯的深度的調節;
8、s5、鉆進取芯時,穩定機構運動,增加鉆進取芯時的穩定性;
9、s6、鉆進取芯完成后,收集機構運動,對鉆進取芯后的樣品進行收集,實現了可以在海底進行多次鉆進與收集;
10、s7、在海水中懸浮運動時,推動機構運動,推動水下爬行機器人本體在海水中運動;
11、s8、上浮時,升降機構運動,將蓄水管中的水排出,整體重量減輕,實現上浮;
12、在上述步驟s2~s8之間,還包括步驟s9、水下爬行機器人本體運動時,監測機構運動,實現對運動的路徑和海水中的相關數據進行監測。
13、與現有技術相比,本發明的優點如下:
14、1.本發明的水下爬行機器人的鉆進取芯機構包括鉆取部件和多節升降機構,多節升降機構對鉆取的深度調節,可以實現海底的鉆進,并且在鉆進時可以實現對鉆進深度的調節,可有效對海底高低差較大的地方如夾縫地貌等惡劣鉆進環境鉆進,能夠獲得更多的海底沉積物或者巖石的垂直數據,為后期實驗提供了更多的原始資料,確保了后期實驗分析的準確性;通過在鉆取部件外部設置穩定機構,可實現在鉆進的過程中鉆桿的穩定性,保證了鉆進時的穩定性,提高了鉆進的效率。
15、2.本發明的水下爬行機器人通過設置收集機構,可以實現對鉆進產生的樣品進行收集,并且在收集可以實現密封,防止水進入,而且可以收集多個,可以實現在海底的多個位置進行鉆進和收集。
16、3.本發明的水下爬行機器人通過設置升降機構、推進機構、運動機構可以實現在海底運動,并且可以實現在海水中懸浮移動,可以實現推動水下爬行機器人運動,并且可以實現對推動的方向進行調節,為上浮提供一定的推力。
技術特征:
1.一種具有海底原位鉆進功能的水下爬行機器人,包括水下爬行機器人本體,其特征在于,所述水下爬行機器人本體(1)上設有鉆進取芯機構、穩定機構和收集機構;所述鉆進取芯機構包括鉆取部件和多節升降機構,多節升降機構首端與所述水下爬行機器人本體(1)相連,多節升降機構末端與所述鉆取部件相連,所述多節升降機構展開或者收回帶動鉆取部件上下運動;所述鉆取部件外部設置所述穩定機構,所述穩定機構與所述鉆取部件轉動連接;所述收集機構設置于所述水下爬行機器人本體內并與所述水下爬行機器人本體活動連接,所述收集機構伸出水下爬行機器人本體(1)與鉆取部件底部緊密抵接,以收集鉆取部件的沉積物或者巖石。
2.根據權利要求1所述的水下爬行機器人,其特征在于,所述多節升降機構包括第一升降架(8),所述第一升降架(8)上設有第一升降滑槽(45),所述第一升降滑槽(45)端壁間轉動連接有第一升降絲桿(46),所述第一升降絲桿(46)與第一升降電機動力連接,所述第一升降電機固定安裝在所述第一升降架(8)內,所述第一升降絲桿(46)的外表面螺紋連接有第一升降螺母塊(47),所述第一升降螺母塊(47)端壁上固定連接有第二升降架(9),所述第二升降架(9)上設有第二升降滑槽(38),所述第二升降滑槽(38)端壁間轉動連接有第二升降絲桿(37),所述第二升降絲桿(37)與第二升降電機動力連接,所述第二升降電機固定安裝在所述第二升降架(9)內,所述第二升降絲桿(37)的外表面螺紋連接有第二升降螺母塊(48),所述第二升降螺母塊(48)外表面固定安裝有滑板(10),所述滑板(10)轉動連接所述鉆取部件。
3.根據權利要求2所述的水下爬行機器人,其特征在于,所述鉆取部件包括鉆進電機(49)、鉆桿(11)和鉆頭(17),所述鉆進電機(49)固定安裝在所述滑板(10)內,所述滑板(10)內設有鉆進齒輪腔(76),所述鉆進齒輪腔(76)端壁間轉動連接有鉆進主齒輪軸(50),所述鉆進主齒輪軸(50)與鉆進電機(49)動力連接,所述鉆進主齒輪軸(50)的外表面固定安裝有鉆進主齒輪(51),所述鉆進主齒輪(51)與鉆進副齒輪(52)嚙合,所述鉆進副齒輪(52)固定安裝在鉆桿(11)的外表面,所述鉆桿(11)貫穿轉動安裝在所述鉆進齒輪腔(76)端壁上,所述鉆桿(11)的末端固定連接所述鉆頭(17),所述鉆頭(17)末端設有封閉腔(62),所述封閉腔(62)底部設置封閉板(41),所述封閉腔(62)端壁上轉動連接有封閉電動絲桿(63),所述封閉電動絲桿(63)與封閉板(41)螺紋連接,所述封閉板(41)滑動安裝在所述封閉腔(62)端壁間,所述鉆頭(17)內設有取芯組件;所述取芯組件包括所述鉆頭(17)內固定連接的取芯電動推桿(53),所述取芯電動推桿(53)下側末端固定連接有取芯推板(54)。
4.根據權利要求3所述的水下爬行機器人,其特征在于,所述穩定機構包括所述滑板(10)底壁上固定連接的固定環(13),所述鉆頭(17)上部轉動連接有轉動盤(16),所述轉動盤(16)與所述固定環(13)之間連接有穩定桿(18),所述鉆桿(11)的外表面滑動連接有轉動環(12),所述轉動環(12)的外表面轉動連接有滑動盤(14),所述滑動盤(14)與所述穩定桿(18)之間滑動連接,所述滑動盤(14)底壁上固定連接有插入錐(15)。
5.根據權利要求1所述的水下爬行機器人,其特征在于,所述收集裝置包括所述水下爬行機器人本體(1)內設置的收集滑槽(43),所述收集滑槽(43)端壁上轉動連接有收集絲桿(44),所述收集絲桿(44)與收集電機動力連接,所述收集電機固定安裝在所述水下爬行機器人本體(1)內,所述收集絲桿(44)的外表面螺紋連接有螺母板(36),所述螺母板(36)上側表面固定安裝有收集箱(35),所述水下爬行機器人本體(1)上設有中字形滑槽(77),所述中字形滑槽(77)內滑動連接有中字形滑板(34),所述中字形滑板(34)與所述收集箱(35)固定連接,所述收集箱(35)上部設有收集通道(75),所述收集通道(75)延伸到所述收集箱(35)內,所述收集通道(75)端壁上設有滑槽(72),所述滑槽(72)端壁上轉動連接有收集電動絲桿(73),所述收集電動絲桿(73)與收集封閉板(74)螺紋連接,所述收集封閉板(74)滑動安裝在所述滑槽(72)端壁間。
6.根據權利要求1所述的水下爬行機器人,其特征在于,所述水下爬行機器人本體(1)上部設有輔助起吊機構,所述輔助起吊機構包括對稱開設在所述水下爬行機器人本體(1)上的起吊滑槽(2),所述起吊滑槽(2)內滑動連接有起吊架(7),所述起吊架(7)端壁上對稱固定連接有限制板(27),所述限制板(27)上貫穿螺紋連接有限制絲桿(28),所述限制絲桿(28)下側末端轉動連接有壓緊板(71),所述限制絲桿(28)上側末端固定連接有手把。
7.根據權利要求1所述的水下爬行機器人,其特征在于,所述水下爬行機器人本體(1)上設有推動機構,所述推動機構包括所述水下爬行機器人本體(1)內設有的調節齒輪腔(58),所述調節齒輪腔(58)端壁間轉動連接有調節主齒輪軸(61),所述調節主齒輪軸(61)與轉向電機動力連接,所述轉向電機固定安裝在所述水下爬行機器人本體(1)內,所述調節主齒輪軸(61)的外表面固定安裝有調節主齒輪(59),所述調節主齒輪(59)與調節副齒輪(60)嚙合,所述調節副齒輪(60)固定安裝在調節轉軸(21)的外表面,所述調節轉軸(21)貫穿轉動安裝在所述調節齒輪腔(58)端壁上,所述調節轉軸(21)的末端固定連接有推動架(3),所述推動架(3)上固定連接有推動固定架(25),所述推動固定架(25)上轉動連接有推動轉軸(5),所述推動轉軸(5)與推動電機動力連接,所述推動電機固定安裝在所述推動固定架(25)內,所述推動轉軸(5)上側末端固定連接有推動螺旋槳(4)。
8.根據權利要求1所述的水下爬行機器人,其特征在于,所述水下爬行機器人本體(1)上設有監測機構,所述監測機構包括所述水下爬行機器人本體(1)上固定安裝的安裝板(29),所述安裝板(29)上固定安裝有監測攝像頭(30),所述監測攝像頭(30)之間的所述安裝板(29)上固定安裝有照明燈(31),所述水下爬行機器人本體(1)上固定安裝有聲吶監測儀(33);所述水下爬行機器人本體(1)上固定安裝有蓄電池(42)。
9.根據權利要求1所述的水下爬行機器人,其特征在于,所述水下爬行機器人本體(1)底部設有運動機構,所述運動機構包括所述水下爬行機器人本體(1)底部固定連接的運動支撐架(32),所述運動支撐架(32)末端固定連接有運動架(78),所述運動架(78)內設有運動齒輪腔(55),所述運動齒輪腔(55)端壁間轉動連接有運動齒輪軸(56),所述運動齒輪軸(56)與運動電機動力連接,所述運動電機固定安裝在所述運動架(78)內,所述運動齒輪軸(56)的外表面固定安裝有運動齒輪(57),所述運動齒輪(57)與環形運動導軌(80)嚙合,所述環形運動導軌(80)轉動安裝在所述運動架(78)上,所述環形運動導軌(80)的外表面固定安裝有運動板(79);
10.一種具有海底原位鉆進功能的水下爬行機器人的方法,基于上述權利要求1-9任一項所述的水下爬行機器人,其特征在于,包括以下步驟:
技術總結
本發明提出一種具有海底原位鉆進功能的水下爬行機器人及方法,包括水下爬行機器人本體,水下爬行機器人本體上設有鉆進取芯機構、穩定機構和收集機構。鉆進取芯機構包括鉆取部件和多節升降機構,鉆進時實現對鉆進的深度調節,穩定機構轉動連接在鉆取部件外部,可在鉆進中保證鉆桿的穩定性,顯著提高鉆進效率;收集機構實現對鉆進樣品的收集,收集時收集機構伸出水下爬行機器人本體與鉆取部件底部緊密抵接,收集可實現密封,防止外部流體進入,并可以收集多個,實現在海底的多個位置進行鉆進和收集;利用該技術還可實現在海底運動和海水中懸浮移動,以及推動水下爬行機器人運動,同時可實現對推動方向的調節,為上浮提供推力。
技術研發人員:孫治雷,張喜林,耿威,曹紅,翟濱,劉慶省,李世興,苗健軍,劉子琪
受保護的技術使用者:青島海洋地質研究所
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!