基于測距傳感分析的AGV貨叉定位方法、設(shè)備及介質(zhì)與流程
本發(fā)明涉及數(shù)據(jù)處理,特別涉及基于測距傳感分析的agv貨叉定位方法、設(shè)備及介質(zhì)。
背景技術(shù):
1、新能源后端(貨架取放料側(cè)叉agv)對接中,庫位數(shù)量大概在1000~5000個(gè),由于agv的行走過程中存在左右偏差,側(cè)叉agv在取放料的時(shí)候物料落到導(dǎo)向塊上存在相對偏差,使物料落偶爾會落到貨叉導(dǎo)向塊上,容易導(dǎo)致agv行走凸出車體導(dǎo)致二次剮蹭設(shè)備或者擺放貨架上的物料凹凸不平,存在貨叉定位精度低、定位效率低、影響作業(yè)安全的技術(shù)問題。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明提供基于測距傳感分析的agv貨叉定位方法、設(shè)備及介質(zhì),以解決現(xiàn)有技術(shù)中貨叉定位精度低、定位效率低、影響作業(yè)安全的技術(shù)問題,實(shí)現(xiàn)提升貨叉定位效能與作業(yè)安全性的技術(shù)效果。
2、第一方面,本發(fā)明提供了基于測距傳感分析的agv貨叉定位方法,其中,所述方法包括:
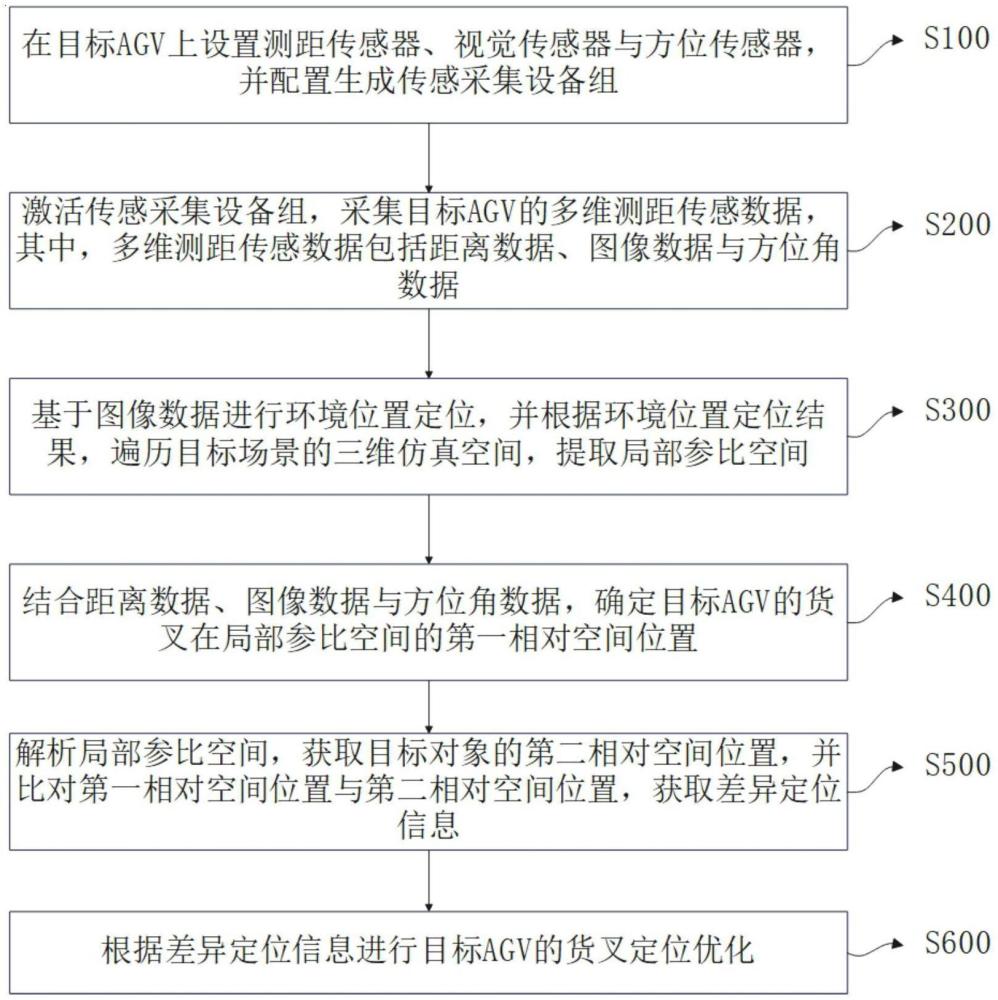
3、在目標(biāo)agv上設(shè)置測距傳感器、視覺傳感器與方位傳感器,并配置生成傳感采集設(shè)備組。
4、激活所述傳感采集設(shè)備組,采集目標(biāo)agv的多維測距傳感數(shù)據(jù),其中,所述多維測距傳感數(shù)據(jù)包括距離數(shù)據(jù)、圖像數(shù)據(jù)與方位角數(shù)據(jù)。
5、基于所述圖像數(shù)據(jù)進(jìn)行環(huán)境位置定位,并根據(jù)環(huán)境位置定位結(jié)果,遍歷目標(biāo)場景的三維仿真空間,提取局部參比空間。
6、結(jié)合所述距離數(shù)據(jù)、所述圖像數(shù)據(jù)與所述方位角數(shù)據(jù),確定目標(biāo)agv的貨叉在所述局部參比空間的第一相對空間位置。
7、解析所述局部參比空間,獲取目標(biāo)對象的第二相對空間位置,并比對所述第一相對空間位置與第二相對空間位置,獲取差異定位信息。
8、根據(jù)所述差異定位信息進(jìn)行目標(biāo)agv的貨叉定位優(yōu)化。
9、在一種可行的方式中,在目標(biāo)agv上設(shè)置測距傳感器、視覺傳感器與方位傳感器,并配置生成傳感采集設(shè)備組,包括:
10、基于目標(biāo)場景的定位需求信息,確定傳感器規(guī)格信息。
11、根據(jù)所述傳感器規(guī)格信息,交互目標(biāo)agv對現(xiàn)有傳感器進(jìn)行匹配篩選,并根據(jù)匹配篩選結(jié)果定義傳感器布設(shè)清單。
12、以所述傳感器布設(shè)清單進(jìn)行目標(biāo)agv的傳感器布設(shè)更新,并連接測距傳感器、視覺傳感器與方位傳感器至傳感采集信宿,獲取所述傳感采集設(shè)備組。
13、在一種可行的方式中,基于所述圖像數(shù)據(jù)進(jìn)行環(huán)境位置定位,并根據(jù)環(huán)境位置定位結(jié)果,遍歷目標(biāo)場景的三維仿真空間,提取局部參比空間,包括:
14、對所述圖像數(shù)據(jù)進(jìn)行圖像去噪與圖像增強(qiáng),并提取圖像中的關(guān)鍵特征信息。
15、通過計(jì)算機(jī)視覺方法進(jìn)行基于所述關(guān)鍵特征信息的環(huán)境特征識別,生成環(huán)境特征向量。
16、遍歷目標(biāo)場景的環(huán)境特征向量數(shù)據(jù)庫進(jìn)行匹配,確定目標(biāo)agv的所述環(huán)境位置定位結(jié)果。
17、結(jié)合所述環(huán)境位置定位結(jié)果與預(yù)設(shè)的空間提取約束,于所述三維仿真空間進(jìn)行局部空間提取,獲取所述局部參比空間。
18、在一種可行的方式中,結(jié)合所述距離數(shù)據(jù)、所述圖像數(shù)據(jù)與所述方位角數(shù)據(jù),確定目標(biāo)agv的貨叉在所述局部參比空間的第一相對空間位置,包括:
19、以所述方位角數(shù)據(jù)為第一配準(zhǔn)依據(jù),結(jié)合目標(biāo)agv的初始空間朝向坐標(biāo)系進(jìn)行一級配準(zhǔn)。
20、以所述距離數(shù)據(jù)為第二配準(zhǔn)依據(jù),基于三角測量法對一級配準(zhǔn)結(jié)果進(jìn)行位置修正,獲取二級配準(zhǔn)結(jié)果。
21、解析所述圖像數(shù)據(jù),提取目標(biāo)對象的輪廓信息與紋理信息,作為輔助配準(zhǔn)依據(jù),并通過所述輔助配準(zhǔn)依據(jù)校驗(yàn)所述二級配準(zhǔn)結(jié)果。
22、若校驗(yàn)通過,則基于所述二級配準(zhǔn)結(jié)果與目標(biāo)agv貨叉的機(jī)內(nèi)相對位置,確定所述第一相對空間位置。
23、在一種可行的方式中,所述目標(biāo)對象為目標(biāo)agv貨叉的作業(yè)目標(biāo)對象,包括運(yùn)輸目標(biāo)對象與放置目標(biāo)對象,所述第二相對空間位置為所述目標(biāo)對象對應(yīng)的作業(yè)任務(wù)控制點(diǎn)在所述局部參比空間的相對空間位置。
24、在一種可行的方式中,所述方法還包括:
25、記錄目標(biāo)agv獲取貨叉作業(yè)記錄,并從所述貨叉作業(yè)記錄中篩選確定非空作業(yè)區(qū)域,輸出為反饋監(jiān)測區(qū)域集。
26、通過目標(biāo)場景的場景監(jiān)測設(shè)備對所述反饋監(jiān)測區(qū)域集進(jìn)行持續(xù)監(jiān)測,并根據(jù)持續(xù)監(jiān)測結(jié)果對目標(biāo)對象進(jìn)行反饋修正。
27、在一種可行的方式中,所述方法還包括:
28、通過累加器累積反饋修正次數(shù)。
29、若所述反饋修正次數(shù)超過第一預(yù)設(shè)次數(shù)或連續(xù)反饋修正超過第二預(yù)設(shè)次數(shù),則根據(jù)反饋修正記錄進(jìn)行對貨叉定位優(yōu)化的決策修正,其中,所述第一預(yù)設(shè)次數(shù)大于所述第二預(yù)設(shè)次數(shù)。
30、在一種可行的方式中,所述方法還包括:
31、獲取目標(biāo)空間的安全圍欄。
32、實(shí)時(shí)監(jiān)測目標(biāo)agv貨叉與所述安全圍欄之間的相對距離。
33、根據(jù)所述安全圍欄等級與目標(biāo)agv的實(shí)時(shí)任務(wù)等級,加權(quán)修正所述相對距離,若修正結(jié)果小于預(yù)設(shè)安全閾值,則自動停止目標(biāo)agv。
34、第二方面,本發(fā)明還提供了一種電子設(shè)備,包括:存儲器,用于存儲可執(zhí)行指令;處理器,用于執(zhí)行所述存儲器中存儲的可執(zhí)行指令時(shí),實(shí)現(xiàn)本發(fā)明提供的基于測距傳感分析的agv貨叉定位方法。
35、第三方面,本發(fā)明還提供了一種計(jì)算機(jī)可讀存儲介質(zhì),存儲有計(jì)算機(jī)程序,該程序被處理器執(zhí)行時(shí),實(shí)現(xiàn)本發(fā)明提供的基于測距傳感分析的agv貨叉定位方法。
36、本發(fā)明公開了基于測距傳感分析的agv貨叉定位方法、設(shè)備及介質(zhì),包括:在目標(biāo)agv上設(shè)置測距傳感器、視覺傳感器與方位傳感器,并配置生成傳感采集設(shè)備組;激活傳感采集設(shè)備組,采集目標(biāo)agv的多維測距傳感數(shù)據(jù),其中,多維測距傳感數(shù)據(jù)包括距離數(shù)據(jù)、圖像數(shù)據(jù)與方位角數(shù)據(jù);基于圖像數(shù)據(jù)進(jìn)行環(huán)境位置定位,并根據(jù)環(huán)境位置定位結(jié)果,遍歷目標(biāo)場景的三維仿真空間,提取局部參比空間;結(jié)合距離數(shù)據(jù)、圖像數(shù)據(jù)與方位角數(shù)據(jù),確定目標(biāo)agv的貨叉在局部參比空間的第一相對空間位置;解析局部參比空間,獲取目標(biāo)對象的第二相對空間位置,并比對第一相對空間位置與第二相對空間位置,獲取差異定位信息;根據(jù)差異定位信息進(jìn)行目標(biāo)agv的貨叉定位優(yōu)化,本發(fā)明公開的基于測距傳感分析的agv貨叉定位方法、設(shè)備及介質(zhì)解決了貨叉定位精度低、定位效率低、影響作業(yè)安全的技術(shù)問題,實(shí)現(xiàn)了提升貨叉定位效能與作業(yè)安全性的技術(shù)效果。
技術(shù)特征:
1.基于測距傳感分析的agv貨叉定位方法,其特征在于,所述方法包括:
2.如權(quán)利要求1所述的基于測距傳感分析的agv貨叉定位方法,其特征在于,在目標(biāo)agv上設(shè)置測距傳感器、視覺傳感器與方位傳感器,并配置生成傳感采集設(shè)備組,包括:
3.如權(quán)利要求2所述的基于測距傳感分析的agv貨叉定位方法,其特征在于,基于所述圖像數(shù)據(jù)進(jìn)行環(huán)境位置定位,并根據(jù)環(huán)境位置定位結(jié)果,遍歷目標(biāo)場景的三維仿真空間,提取局部參比空間,包括:
4.如權(quán)利要求3所述的基于測距傳感分析的agv貨叉定位方法,其特征在于,結(jié)合所述距離數(shù)據(jù)、所述圖像數(shù)據(jù)與所述方位角數(shù)據(jù),確定目標(biāo)agv的貨叉在所述局部參比空間的第一相對空間位置,包括:
5.如權(quán)利要求4所述的基于測距傳感分析的agv貨叉定位方法,其特征在于,所述目標(biāo)對象為目標(biāo)agv貨叉的作業(yè)目標(biāo)對象,包括運(yùn)輸目標(biāo)對象與放置目標(biāo)對象,所述第二相對空間位置為所述目標(biāo)對象對應(yīng)的作業(yè)任務(wù)控制點(diǎn)在所述局部參比空間的相對空間位置。
6.如權(quán)利要求1所述的基于測距傳感分析的agv貨叉定位方法,其特征在于,所述方法還包括:
7.如權(quán)利要求6所述的基于測距傳感分析的agv貨叉定位方法,其特征在于,所述方法還包括:
8.如權(quán)利要求1所述的基于測距傳感分析的agv貨叉定位方法,其特征在于,所述方法還包括:
9.一種電子設(shè)備,其特征在于,所述電子設(shè)備包括:
10.一種計(jì)算機(jī)可讀存儲介質(zhì),其上存儲有計(jì)算機(jī)程序,其特征在于,該程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)如權(quán)利要求1至8任一項(xiàng)所述的基于測距傳感分析的agv貨叉定位方法。
技術(shù)總結(jié)
本發(fā)明公開了基于測距傳感分析的AGV貨叉定位方法、設(shè)備及介質(zhì),涉及數(shù)據(jù)處理技術(shù)領(lǐng)域,所述方法包括:在目標(biāo)AGV上配置測距、視覺和方位傳感器,構(gòu)建傳感采集設(shè)備組;激活設(shè)備組,采集目標(biāo)AGV的多維傳感數(shù)據(jù),包括距離、圖像和方位角數(shù)據(jù);利用圖像數(shù)據(jù)進(jìn)行環(huán)境位置定位,并遍歷目標(biāo)場景的三維仿真空間提取局部參比空間;結(jié)合多維傳感數(shù)據(jù),確定目標(biāo)AGV貨叉在局部參比空間的第一相對位置;解析局部參比空間獲取目標(biāo)對象的第二相對位置,比對兩者差異以獲取定位差異信息,并基于差異信息優(yōu)化目標(biāo)AGV貨叉定位,進(jìn)而達(dá)成提升貨叉定位效能與作業(yè)安全性的技術(shù)效果。
技術(shù)研發(fā)人員:李飛軍,昝學(xué)彥,劉丹,陳斯源,趙華祥,鄒家?guī)?李發(fā)頻,蔣干勝,徐波
受保護(hù)的技術(shù)使用者:珠海創(chuàng)智科技有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!