一種電桿組立垂直鉆孔裝置及其鉆孔控制方法與流程
本發明屬于配網電桿組立設備領域,具體為一種電桿組立垂直鉆孔裝置及其鉆孔控制方法。
背景技術:
1、對于配電網電桿組立機械化作業,巖土鉆探施工是電桿組立的第一步,傳統的鉆孔施工通過將挖掘機的鏟斗換成鉆桿,駕駛員同時操控挖掘機動臂和斗桿的兩個手柄完成復合動作,實現垂直鉆孔操作,工作人員需對作業環境做出判斷,并依據經驗操控兩個手柄,從而完成垂直鉆孔作業,對駕駛員操作熟練度要求較高。若操作員缺乏經驗,可能將會造成鉆孔定位不準確、鉆孔跑偏以及鉆孔深度不到位等問題,嚴重的可能影響施工效果和施工安全。
技術實現思路
1、本發明的目的在于提供一種可降低操作難度、提高鉆孔效率和鉆孔質量的電桿組立垂直鉆孔裝置及其鉆孔控制方法。
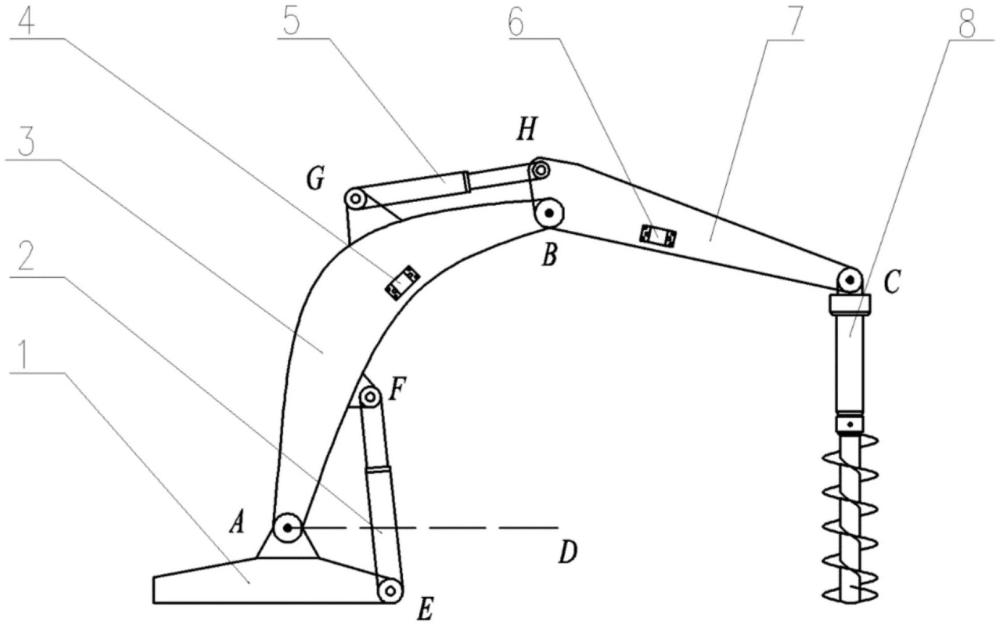
2、本發明提供的這種電桿組立垂直鉆孔裝置,采用以下技術方案:包括相互鉸接的第一動臂和第二動臂,第一動臂的后端與回轉平臺鉸接,第二動臂的前端鉸接鉆機,第一動臂與回轉平臺之間鉸接第一油缸,第一動臂和第二動臂之間鉸接第二油缸。所述第一動臂上設置第一傾角傳感器,第二動臂上設置第二傾角傳感器。
3、上述技術方案的一種實施方式中,所述第一傾角傳感器以其測量軸方向與第一動臂兩端鉸接點的連線平行布置,所述第二傾角傳感器以其測量軸方向與第二動臂兩端鉸接點的連線平行布置。
4、本發明提供的這種利用上述電桿組立垂直鉆孔裝置進行鉆孔的控制方法,包括s1模式和s2模式,s1模式為常規模式,s2模式為垂直鉆進模式,兩種模式通過按鈕開關進行切換。
5、上述方法的一種實施方式中,s1模式通過兩個手柄分別控制第一油缸和第二油缸的運動來分別控制第一動臂和第二動臂的運動。
6、上述方法的一種實施方式中,s2模式包括兩種控制方式;控制方式一通過單個手柄控制第二油缸的運動來控制第二動臂的運動,此過程中,第一油缸根據第二動臂的姿態自主調節,實現第一動臂的自動隨動控制;控制方式二通過單個手柄控制第一油缸的運動來控制第一動臂的運動,此過程中,第二油缸根據第一動臂的姿態自主調節,實現第二動臂的自動隨動控制。
7、上述方法的一種實施方式中,s2模式下選擇控制方式一時,執行以下控制計算過程:
8、step1:接收傳感器采集初始時刻的角度信號θ1、θ2,進行機構運動學正解求解:
9、
10、其中l1、l2分別為第一動臂、第二動臂兩端鉸接點之間連線的長度,λ1、λ2分別為第一油缸、第二油缸的伸縮量,單位均為mm,x、y為第二動臂前端位置坐標,第一傾角傳感器和第二傾角傳感器分別采集的角度信號為θ1、θ2;
11、step2:接收手柄控制信號,以及兩個傾角傳感器的實時信號,求解第二動臂下一時刻的前端位置坐標,并求解鉆孔裝置的運動學逆解,獲得第一動臂下一時刻的姿態信息:
12、
13、
14、其中,求解第二動臂的前端位置y坐標時,y坐標符號的取值規則為:當|y|>a時,y按就近原則進行取值;當|y|≤a時,當θ2增大時,y值取正;當θ2減小時,y值取負;上述a為大于0的常數值。
15、step3:求出第一動臂的期望姿態后,進行第一油缸的長度與角度轉換,從而求取第一油缸期望的伸縮位移量λ1:
16、
17、其中lae為第一動臂下端鉸接點與第一油缸下端鉸接點的連線長度,laf為第一動臂下端鉸接點與第一油缸上端鉸接點的連線長度,h1為第一油缸的最小長度,單位均為mm;
18、控制第一油缸的運動,從而實現第二動臂前端位置坐標的調節與控制。
19、上述方法的一種實施方式中,s2模式下選擇控制方式二時,執行以下控制計算過程:
20、step1:接收傳感器采集初始時刻的角度信號θ1、θ2,進行動臂運動學正解求解:
21、
22、其中l1、l2分別為第一動臂、第二動臂兩端鉸接點之間連線的長度,λ1、λ2分別為第一油缸、第二油缸的伸縮量,單位均為mm;x、y為第二動臂的前端位置坐標;第一傾角傳感器和第二傾角傳感器分別采集的角度信號為θ1、θ2;
23、step2:接收手柄控制信號,以及兩個傾角傳感器的實時信號,求解第二動臂下一時刻鉆孔裝置運動學逆解,獲得第二動臂的下一時刻姿態信息:
24、
25、step3:求出第二動臂的期望姿態后,進行第二油缸的長度與角度轉換,從而求取第二油缸期望的伸縮位移量λ2,:
26、
27、其中lgb為第二油缸后端鉸接點與第一動臂上端鉸接點的連線長度,lbh為第一動臂上端鉸接點與第二油缸前端鉸接點的連線長度,h2為第二油缸的最小長度,單位均為mm;
28、控制第二油缸的運動,從而實現第二動臂前端位置坐標的調節與控制。
29、上述方法的一種實施方式中,控制器處于s2模式時選擇控制方式一還是控制方式二,由控制選擇程序判斷設定,其中一種切換方式為:當第二傳感器測得的角度信號θ2>0時,選擇控制方式一;當第二傳感器測得的角度信號θ2≤0時,控制器切換至控制方式二。
30、本裝置通過回轉平臺安裝于挖掘機上,采用傾角傳感器測量兩節動臂的傾角并實時反饋給控制器,通過垂直控制方法自動實現兩節動臂的協同運動,駕駛員只需要操控一個手柄便可實現鉆桿自動垂直下降,有效降低了鉆孔工作裝置操控復雜性,由于鉆孔工作裝置的自動控制,能有效提高施工效率和鉆孔過程孔洞的垂直度。可很好的實現降低操作難度、提高鉆孔效率和鉆孔質量的發明目的。
技術特征:
1.一種電桿組立垂直鉆孔裝置,包括相互鉸接的第一動臂和第二動臂,第一動臂的后端與回轉平臺鉸接,第二動臂的前端鉸接鉆機,第一動臂與回轉平臺之間鉸接第一油缸,第一動臂和第二動臂之間鉸接第二油缸,其特征在于:所述第一動臂上設置第一傾角傳感器,第二動臂上設置第二傾角傳感器。
2.如權利要求1所述的電桿組立垂直鉆孔裝置,其特征在于:所述第一傾角傳感器以其測量軸方向與第一動臂兩端鉸接點的連線平行布置,所述第二傾角傳感器以其測量軸方向與第二動臂兩端鉸接點的連線平行布置。
3.一種利用權利要求2所述電桿組立垂直鉆孔裝置進行鉆孔的控制方法,其特征在于:該方法包括s1模式和s2模式,s1模式為常規模式,s2模式為垂直鉆進模式,兩種模式通過按鈕開關進行切換。
4.如權利要求3所述的方法,其特征在于:s1模式通過兩個手柄分別控制第一油缸和第二油缸的運動來分別控制第一動臂和第二動臂的運動。
5.如權利要求3所述的方法,其特征在于:s2模式包括兩種控制方式;控制方式一為通過單個手柄控制第二油缸的運動來控制第二動臂的運動,此過程中,第一油缸根據第二動臂的姿態自主調節,實現第一動臂的自動隨動控制;控制方式二為通過單個手柄控制第一油缸的運動來控制第一動臂的運動,此過程中,第二油缸根據第一動臂的姿態自主調節,實現第二動臂的自動隨動控制。
6.如權利要求5所述的方法,其特征在于:s2模式下選擇控制方式一時,執行以下控制計算過程:
7.如權利要求5所述的方法,其特征在于:s2模式下選擇控制方式二時,執行以下控制計算過程:
8.如權利要求5所述的方法,其特征在于:控制器處于s2模式時選擇控制方式一還是控制方式二,由控制選擇程序判斷設定,其中一種切換方式為:當第二傾角傳感器測得的角度信號θ2>0時,選擇控制方式一;當第二傾角傳感器測得的角度信號θ2≤0時,控制器切換至控制方式二。
技術總結
本發明公開了一種電桿組立垂直鉆孔裝置及其鉆孔控制方法,包括相互鉸接的第一動臂和第二動臂,第一動臂的后端與回轉平臺鉸接,第二動臂的前端鉸接鉆機,第一動臂與回轉平臺之間鉸接第一油缸,第一動臂和第二動臂之間鉸接第二油缸。所述第一動臂上設置第一傾角傳感器,第二動臂上設置第二傾角傳感器。鉆孔裝置通過回轉平臺安裝于挖掘機上,采用傾角傳感器測量兩節動臂的傾角并實時反饋給控制器,通過垂直控制方法自動實現兩節動臂的協同運動,駕駛員只需要操控一個手柄便可實現鉆桿自動垂直下降,有效降低了鉆孔工作裝置操控復雜性,由于鉆孔工作裝置的自動控制,能有效提高施工效率和鉆孔過程孔洞的垂直度。可很好的實現降低操作難度、提高鉆孔效率和鉆孔質量的發明目的。
技術研發人員:張亮峰,楊淼,陳偉,殷鵬,方慶,謝超,毛柳明,趙邈,楊文,包依平,李金亮,李亞雄,黃亮亮,王鄒俊,段敏波,楊林璨,朱坤陽,陳明
受保護的技術使用者:國網湖南省電力有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!