一種模塊化三自由度自適應管道巡檢機器人及控制系統
本發明涉及管道檢測,尤其涉及一種模塊化三自由度自適應管道巡檢機器人。
背景技術:
1、管道作為現代城市生命線工程的核心載體,廣泛應用于供水、供氣、油氣輸送、化工及醫療等領域。隨著工業場景的精細化與管網拓撲復雜化,小型化、多分支、非結構化管道的應用比例顯著增加。長期服役的管道因腐蝕、機械損傷、地質沉降等因素導致的泄漏與結構缺陷問題日益突出,嚴重威脅公共安全與生態環境。
2、然而,當前管道檢測技術存在一定技術局限性。依賴內窺鏡或有限自動化設備的人工檢測,在狹窄的管道中效率低下,且在高危環境下作業風險較大;而主流的管道巡檢機器人由于其剛性結構和運動控制算法的限制,在彎管中的通過率不高,且對有坡度的濕滑管壁適應性差,檢測過程中可能會對管道造成損傷,無法準確探測管道內部問題。同時,這些機器人在運動靈活性、結構可維護性和多缺陷協同識別能力等方面,難以滿足復雜多樣化的檢測需求。因此,亟需研發一種高機動性、模塊化、強環境適應性的管道巡檢裝置,以解決復雜管網檢測的技術難題,支撐城市基礎管路設施的安全運維。
技術實現思路
1、本發明提供一種模塊化三自由度自適應管道巡檢機器人旨在解決現有管道巡檢機器人在復雜管道環境中的適應性不足、運動自由度受限及模塊化設計不足的問題,能夠有效自主探測管道內部問題。
2、為實現上述目的,本發明采用的技術方案如下:
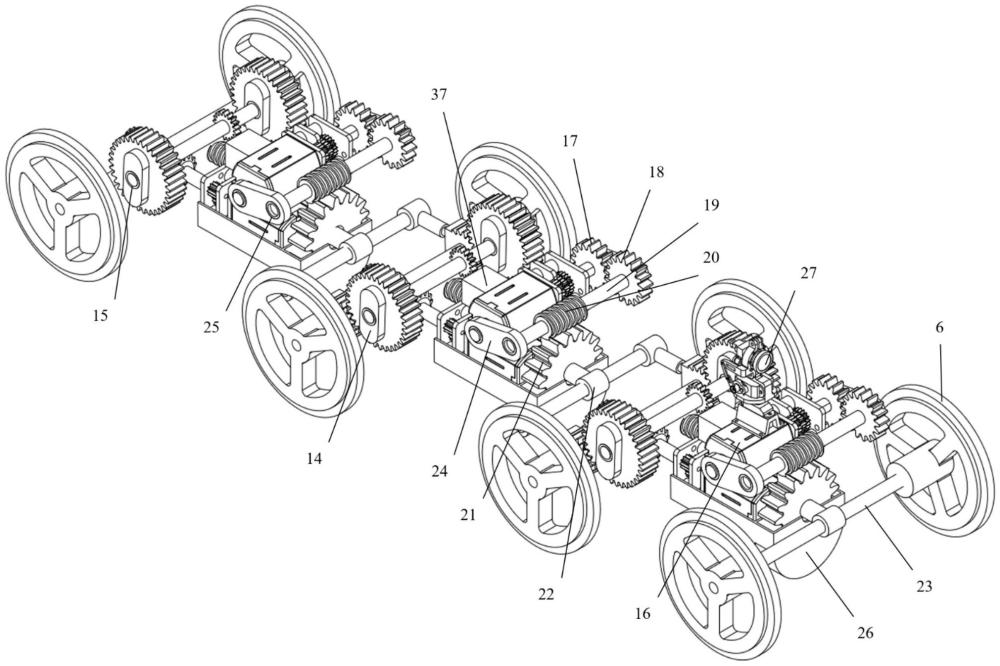
3、一種模塊化三自由度自適應管道巡檢機器人,包括運動機構、檢測組件、傳感器組件與控制器;其中運動機構由頭部、中間、尾部三節獨立模塊構成,每節集成驅動單元、折疊單元與轉向單元。各模塊間通過機械接口實現連接,支持模塊的單獨拆卸與互換,提高了機器人的可擴展性與維護便捷性。
4、進一步地,所述驅動單元包括驅動軸、驅動電機、主動驅動錐齒輪、從動驅動錐齒輪、傳動軸、驅動輪;所述驅動軸安裝在所述驅動電機上,所述主動驅動錐齒輪套設在所述驅動軸上,并與所述從動驅動錐齒輪相嚙合,所述從動驅動錐齒輪設置于所述傳動軸上,兩個所述驅動輪固連在所述傳動軸兩端。
5、進一步地,所述折疊單元包括折疊電機、主動折疊蝸桿、被動折疊蝸輪、折疊軸、被動折疊齒輪一、被動折疊齒輪二、折疊套桿、支撐壓緊板二、支撐軸承二;所述主動折疊蝸桿套設在所述折疊電機的轉軸上,并與套設在所述折疊軸上的所述被動折疊蝸輪嚙合,兩個所述被動折疊齒輪一通過所述支撐軸承二設置于所述折疊軸上,兩個所述支撐壓緊板二套設在所述支撐軸承上,并安裝在所述被動折疊齒輪一兩側對其進行軸向固定,所述被動折疊齒輪二與被動折疊齒輪二嚙合,并與所述折疊套桿固連。
6、進一步地,所述轉向單元包括轉向電機、主動轉向齒輪、從動轉向齒輪、轉向軸一、轉向蝸桿、轉向蝸輪、支撐三通、轉向軸二、支撐壓緊板一、支撐軸承一與機體外殼;所述主動轉向齒輪安裝在所述轉向電機的轉軸上,并與套設在所述轉向軸一上的所述從動轉向齒輪嚙合,所述轉向軸一通過所述支撐軸承一安裝在所述支撐壓緊板一上,所述支撐壓緊板一與所述轉向電機殼體固連,所述轉向蝸桿套設在所述轉向軸一上,并與所述轉向蝸輪嚙合,所述支撐三通與轉向蝸輪的通孔固連,所述轉向軸二與所述支撐三通的通孔固連,所述機體外殼安裝在所述轉向電機上。
7、進一步地,所述檢測組件包括環形照明燈、高清攝像頭、舵機云臺;所述環形照明燈安裝在所述高清攝像頭周圍,所述高清攝像頭與所述舵機云臺通過螺栓固定。
8、進一步地,所述舵機云臺包括云臺舵機一、云臺舵機二、云臺舵臂、云臺連接件、云臺夾臂、云臺夾扣、云臺底座;所述云臺夾扣通過螺栓固定加緊所述高清攝像頭,所述云臺夾臂與所述云臺夾扣固連,所述云臺連接件兩端通過活動軸分別與所述云臺夾臂和所述云臺舵臂連接,所述云臺舵臂安裝在所述云臺舵機一上,所述云臺舵機二安裝在所述云臺底座上,所述云臺舵機二的舵臂與所述云臺舵機一固連。
9、進一步地,所述傳感器組件包括光電編碼器、九軸姿態傳感器與壓力傳感器;所述光電編碼器用于獲取電機的轉速信號,所述九軸姿態傳感器用于采集運動機構的俯仰角θ、偏航角ψ與橫滾角φ,所述壓力傳感器用于接收折疊單元向管壁施加的壓力信號。
10、進一步地,所述驅動單元給每節運動機構提供驅動力,所述驅動電機的驅動軸通過一對正交嚙合的錐齒輪減速器將動力輸出到傳動軸,實現驅動輪的等速比扭矩傳遞。
11、進一步地,所述折疊單元控制每節驅動機構對管壁施加的正壓力大小,所述折疊電機輸出軸驅動所述主動折疊蝸桿旋轉,通過蝸桿蝸輪副的嚙合傳動,實現一級減速并放大輸出扭矩,所述被動折疊蝸輪與所述折疊軸剛性連接,將動力傳遞至所述折疊軸;所述折疊軸兩端對稱布置所述被動折疊齒輪一,該齒輪與所述折疊套桿端部的所述被動折疊齒輪二形成外嚙合傳動,所述折疊套桿與下節運動機構固連,在被動折疊齒輪嚙合力的作用下,將相鄰兩節運動機構驅動輪的軸向位移轉化為徑向擴張量,使其與管壁產生接觸正壓力;此外,蝸輪蝸桿的自鎖特性可有效防止運動反向傳遞,確保所述折疊單元在受壓工況下的位置鎖定。
12、進一步地,所述轉向單元控制所述轉向軸二及其上驅動輪沿管道徑向的旋轉角度,實現管道巡檢機器人在管內轉向;所述轉向電機輸出軸的動力通過齒輪減速器傳給所述轉向軸一,所述轉向軸一末端固連所述轉向蝸桿,其與所述轉向蝸輪構成正交嚙合蝸桿蝸輪副,以其自鎖特性確保轉向角度鎖定,防止負載反驅;所述轉向蝸輪通過內孔與所述支撐三通固連,所述轉向軸二則貫穿所述支撐三通的通孔并與之剛性連接,當所述轉向蝸輪受蝸桿驅動旋轉時,所述支撐三通將旋轉運動傳遞至所述轉向軸二,帶動其末端驅動輪繞管道徑向軸線偏轉。
13、進一步地,所述舵機云臺可對所述攝像頭進行俯仰與偏轉角度的控制,所述云臺舵機一驅動所述云臺舵臂,通過所述云臺連接件帶動所述云臺夾臂擺動,進而控制固定在所述云臺夾扣中的所述高清攝像頭的上下俯仰運動,其俯仰角度α滿足:
14、
15、其中,θ1為舵臂旋轉角度,l1為舵臂長度,l2為連接件長度。
16、所述云臺舵機二固連于所述云臺底座,所述云臺舵機二的舵臂與所述云臺舵機一殼體剛性連接,通過所述云臺舵機二的舵臂擺動實現攝像頭的水平偏轉。
17、進一步地,所述檢測模塊的環形照明燈可提供穩定的光源,通過所述高清攝像頭可獲取管內清晰且曝光正常的圖像信息,可查看與分析管內裂縫、結構缺陷、腐蝕等問題。
18、進一步地,所述控制器接收所述傳感器組件的信號,可采集管道巡檢機器人的速度脈沖值、姿態角度與支撐正壓力數據,基于傳感器的反饋信息可對運動機構電機進行閉環控制,實現驅動電機的矢量扭矩分配、折疊電機的徑向位置伺服控制與轉向電機的角度閉環調節;同時所述控制器可處理與分析所述檢測組件的攝像頭采集的圖像信息,并控制所述環形照明燈的亮度與所述舵機云臺的旋轉角度。
19、該技術方案中,需要說明的是,機器人的電子器件通過外部電纜供電與傳輸數據。
20、本發明的有益效果:
21、(1)本發明所提出的一種模塊化三自由度自適應管道巡檢機器人,該機器人采用三節式模塊化運動機構,各節可獨立運動,能夠適應復雜的管道結構;同時,其結構設計緊湊,能夠在空間有限的管路環境中高效作業;各模塊可單獨拆卸和更換,方便進行維護和修理。
22、(2)本發明所提出的一種模塊化三自由度自適應管道巡檢機器人,該機器人的驅動單元采用正交錐齒輪傳動結構實現動力軸與傳動軸的垂直轉向,確保兩驅動輪等速比輸出,避免因差速導致的管壁打滑現象;同時三節式驅動單元獨立控制,單節故障時可通過其余兩節動力重組維持基本運動能力,提高了系統可靠性。
23、(3)本發明所提出的一種模塊化三自由度自適應管道巡檢機器人,該機器人的折疊單元通過蝸輪蝸桿與雙齒輪嚙合傳動將軸向位移轉化為徑向擴張,通過調節折疊電機的輸出力矩即可控制折疊角度以及對管壁施加的正壓力大小,確保在濕滑管壁及坡度環境下的牽引力穩定性;同時利用蝸輪蝸桿減速器的自鎖特性,電機無需輸出力矩即可鎖定驅動輪位置,降低系統能耗,同時防止管壁沖擊導致的機構回退。
24、(4)本發明所提出的一種模塊化三自由度自適應管道巡檢機器人,該機器人的轉向單元的電機輸出力矩通過主從動齒輪減速器與蝸輪蝸桿減速器,實現驅動輪偏轉角度的高精度控制;同時蝸輪蝸桿自鎖機制可防止轉向角度因外部擾動發生偏移。
25、(5)本發明所提出的一種模塊化三自由度自適應管道巡檢機器人,該機器人的檢測組件采用雙軸舵機云臺搭載具有環形陣列照明燈的攝像頭,可在不同光照條件下實現多角度的視覺探測,提高了管道檢測效率。
26、(6)本發明所提出的一種模塊化三自由度自適應管道巡檢機器人,該機器人的控制系統基于九軸姿態傳感器、光電編碼器與壓力傳感器的數據融合,實現對運動機構鏈節的驅動、折疊與轉向三自由度閉環控制,提高了運動精度與復雜狹小管道空間中的適應能力。
- 還沒有人留言評論。精彩留言會獲得點贊!