基于交通路網(wǎng)權(quán)重學(xué)習(xí)的城市機動車多樣化軌跡生成方法
本發(fā)明屬于車輛軌跡生成,具體涉及一種基于交通路網(wǎng)權(quán)重學(xué)習(xí)的城市機動車多樣化軌跡生成方法。
背景技術(shù):
1、隨著城市交通的快速發(fā)展和交通管理需求的日益增長,大規(guī)模車輛軌跡數(shù)據(jù)集生成對于信號燈優(yōu)化、交通流分析、事故調(diào)查等領(lǐng)域具有重要意義。目前廣泛采用的車輛軌跡生成方法主要依賴于全球定位系統(tǒng)(gps)定位數(shù)據(jù),然而由于用戶隱私保密協(xié)議以及禁止永久存儲城市行人于車輛軌跡等政策使得gps數(shù)據(jù)獲取成本高昂。
2、近年來,城市道路中卡口攝像頭覆蓋率的不斷提高,為解決車輛軌跡生成問題提供另一種方法。路網(wǎng)中廣泛分布的卡口攝像頭會時刻記錄下車輛出現(xiàn)的位置和時間信息,為研究人員提供了海量的車輛移動數(shù)據(jù)。因此,本文研究如何利用卡口數(shù)據(jù)生成車輛軌跡。
3、考慮到龐大且復(fù)雜的城市道路網(wǎng)絡(luò),車輛軌跡重構(gòu)與生成可被認定為一種特殊的尋路服務(wù),早期的研究主要集中在如何將現(xiàn)有的啟發(fā)式搜索算法(如dijkstra最短路徑算法和a*搜索算法)進行擴展。其中,a*算法因其使用啟發(fā)式估計、具有靈活性和剪枝避免重復(fù)等特點,成為了一種被廣泛應(yīng)用于路徑規(guī)劃的算法。隨著深度學(xué)習(xí)的發(fā)展,神經(jīng)網(wǎng)絡(luò)為車輛軌跡重構(gòu)提供了更優(yōu)解決思路。與此同時,圖神經(jīng)模型(gcn),遞歸神經(jīng)網(wǎng)絡(luò)(rnn),已被廣泛用于對序列軌跡數(shù)據(jù)進行建模。軌跡生成本質(zhì)是上是生成問題,根本目的在于學(xué)習(xí)數(shù)據(jù)特征并生成與真實數(shù)據(jù)無法區(qū)分的解集,目前已有許多生成模型可完成此項任務(wù),如自動編碼器(ae)、變分自編碼器(vae)和生成對抗網(wǎng)絡(luò)(gan)。
4、然而先前的模型都無法應(yīng)對以下挑戰(zhàn):
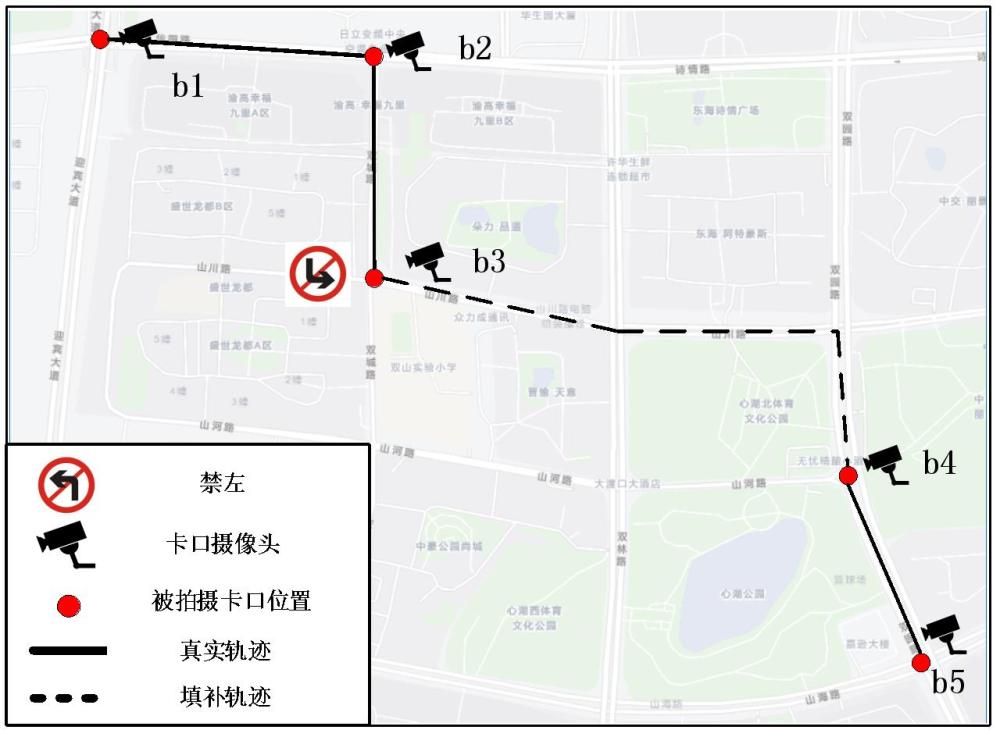
5、挑戰(zhàn)1:卡口數(shù)據(jù)拍攝的車輛軌跡是不連續(xù)的。如圖1所示,由于卡口攝像頭的安裝和維護,包括硬件、軟件、人力以及運行成本需要投入大量資金,卡口攝像頭在路網(wǎng)覆蓋率普遍在40%以下,示例車輛軌跡只在部分卡口被拍攝記錄(紅色圓點表示被攝像頭拍攝位置),因此記錄的車輛軌跡為不連通的軌跡序列。
6、挑戰(zhàn)2:先前的研究中,xin等人使用lstm對軌跡特征進行建模,然后利用變分自動編碼器(vae)框架來生成軌跡;choi等人將學(xué)習(xí)觀察到的軌跡中的位置序列形式化為部分可觀察馬爾可夫決策過程中的模仿學(xué)習(xí)問題。然而這兩種方法均基于gps數(shù)據(jù),無法適配缺失的卡口數(shù)據(jù)。
7、挑戰(zhàn)3:基于序列的模型關(guān)注生成軌跡序列的時空性而忽略路網(wǎng)約束。zhang等人結(jié)合vae和vrnn對軌跡進行編碼,并基于lstm生成軌跡后進入馬爾可夫模型得到路網(wǎng)約束軌跡;然而正如圖1中,重構(gòu)的軌跡在標有禁左行駛路口依然選擇左轉(zhuǎn),這種脫離路網(wǎng)生成軌跡往往不適應(yīng)下游需要在真實路網(wǎng)上進行實際車輛仿真的應(yīng)用。
8、挑戰(zhàn)4:基于軌跡的生成模型無法滿足真實路網(wǎng)中軌跡的多樣化需求。圖1中,到的潛在通行軌跡理應(yīng)當有多條。現(xiàn)有模型中,如xin等人設(shè)計的trajvae模型,choi等人設(shè)計的trajgail模型都計算生成軌跡與樣本數(shù)據(jù)的損失,旨在生成無法與樣本數(shù)據(jù)區(qū)分的軌跡,所以訓(xùn)練后只能生成近似樣本的車輛軌跡。在真實路網(wǎng)中,生成缺失區(qū)域的軌跡理應(yīng)有多種可能。
技術(shù)實現(xiàn)思路
1、針對現(xiàn)有技術(shù)中的上述不足,本發(fā)明提供的基于交通路網(wǎng)權(quán)重學(xué)習(xí)的城市機動車多樣化軌跡生成方法解決了背景技術(shù)中的上述問題。
2、為了達到上述發(fā)明目的,本發(fā)明采用的技術(shù)方案為:基于交通路網(wǎng)權(quán)重學(xué)習(xí)的城市機動車多樣化軌跡生成方法,包括以下步驟:
3、s1、在網(wǎng)絡(luò)層生成交通路網(wǎng)的路網(wǎng)權(quán)重圖;
4、所述網(wǎng)絡(luò)層包括依次連接譜聚類、k-means聚類、圖神經(jīng)網(wǎng)絡(luò)gcn和圖注意力網(wǎng)絡(luò)gat;
5、s2、基于路網(wǎng)權(quán)重圖,根據(jù)車輛的起終點執(zhí)行a*搜索算法,輸出車輛重構(gòu)軌跡;
6、s3、根據(jù)車輛重構(gòu)軌跡與對應(yīng)真實軌跡的損失反向訓(xùn)練網(wǎng)絡(luò)層中的圖神經(jīng)網(wǎng)絡(luò)gcn和圖注意力網(wǎng)絡(luò)gat,進而輸出具有連通車輛軌跡的路網(wǎng)權(quán)重圖;
7、s4、將路網(wǎng)權(quán)重圖輸入至vae模型中,依次通過編碼、分區(qū)采樣及解碼處理,重構(gòu)獲得多個路網(wǎng)權(quán)重圖,對其執(zhí)行a*搜索算法,生成多樣化車輛軌跡。
8、進一步地,所述步驟s1包括以下分步驟:
9、s11、獲取交通路網(wǎng)信息,并將交通路網(wǎng)初始化;
10、s12、使用譜聚類算法對初始化的交通路網(wǎng)進行功能區(qū)劃分,并使用k-means聚類算法對劃分的功能區(qū)聚類,獲得從道路網(wǎng)絡(luò)到功能區(qū)網(wǎng)絡(luò)的映射關(guān)系,構(gòu)造出功能區(qū)路網(wǎng);
11、s13、通過圖卷積神經(jīng)網(wǎng)絡(luò)gcn捕獲功能區(qū)路網(wǎng)中相鄰簇的特征,生成功能區(qū)網(wǎng)絡(luò)的特征矩陣;
12、s14、基于功能區(qū)網(wǎng)絡(luò)的特征矩陣,使用圖注意力網(wǎng)絡(luò)gat捕獲不同影響因子下的路段特征權(quán)重,并通過將高維權(quán)重歸一化處理,生成路網(wǎng)權(quán)重圖。
13、進一步地,所述步驟s12中,道路網(wǎng)絡(luò)到功能區(qū)網(wǎng)絡(luò)的映射關(guān)系表示為:
14、
15、式中,表示關(guān)系矩陣,表示路網(wǎng),表示簇,與劃分的功能區(qū)對應(yīng);其中,簇中每條路段節(jié)點的重要性一致,則路段節(jié)點在功能區(qū)網(wǎng)絡(luò)中的軟分配矩陣表示為:
16、
17、式中,表示該路段屬于簇的概率。
18、進一步地,所述步驟s13中,所述功能區(qū)網(wǎng)絡(luò)的特征矩陣表示為;
19、
20、
21、
22、式中,表示特征矩陣,表示圖卷積神經(jīng)網(wǎng)絡(luò),表示功能區(qū)網(wǎng)絡(luò)的鄰接矩陣,表示將軟分配矩陣與交通路網(wǎng)的初始特征矩陣轉(zhuǎn)置相乘得到的矩陣,表示交通路網(wǎng)鄰接矩陣;其中,初始特征矩陣中的信息包括交通路網(wǎng)中每一路段的poi分類標簽、真實長度與截面寬度、中心點經(jīng)緯度和車道數(shù)目。
23、進一步地,所述步驟s14包括以下分步驟:
24、s14-1、將功能區(qū)網(wǎng)絡(luò)的特征矩陣反向分配至其功能區(qū)下的每個路段節(jié)點,獲取道路網(wǎng)絡(luò)特征矩陣;
25、s14-2、根據(jù)道路網(wǎng)絡(luò)特征矩陣,對每個路段的特征進行線性變換后計算相鄰路段的相似系數(shù),并對其進行歸一化處理;
26、s14-3、基于歸一化處理的相鄰路段的相似系數(shù),使用多頭注意力機制來學(xué)習(xí)獲取鄰居路段特征;
27、s14-4、將所有鄰居路段特征聚合,獲得完整路網(wǎng)特征矩陣;
28、s14-5、將完整路網(wǎng)特征矩陣中每個節(jié)點的高維特征歸一化,并結(jié)合有向圖連接關(guān)系,生成路網(wǎng)權(quán)重圖。
29、進一步地,所述步驟s2具體為:
30、以路網(wǎng)權(quán)重圖作為搜索依據(jù),從給定車輛的起點開始,以從源節(jié)點到候選節(jié)點的成本與從候選節(jié)點到目標節(jié)點的累計成本之和最低為目標,執(zhí)行a*搜索算法,獲得車輛從起點到終點車輛重構(gòu)軌跡。
31、進一步地,所述步驟s4具體為:
32、s41、將路網(wǎng)權(quán)重圖劃分為簇內(nèi)路網(wǎng)和離群路段,并輸入至vae模型中;
33、s42、通過編碼器計算路網(wǎng)權(quán)重圖的均值和方差,進而將簇內(nèi)路段的噪聲采樣限制在高斯分布的中心區(qū)域,將離群路段的噪聲采樣限制在邊緣區(qū)域;
34、s43、使用重參數(shù)技巧對簇內(nèi)路段和離群路段進行分區(qū)采樣,生成潛在變量;
35、s44、通過解碼器將生成的潛在向量映射回原數(shù)據(jù)空間,重構(gòu)出對應(yīng)的路網(wǎng)權(quán)重圖。
36、進一步地,所述步驟s43中,對于離群路段,基于設(shè)置的標準差倍數(shù)將高斯分布劃分出中心區(qū)域,并限制其在中心區(qū)域采樣出噪聲向量,進而使用重參數(shù)技巧生成潛在變量,和表示編碼器計算路網(wǎng)權(quán)重圖的均值和方差;
37、對于簇內(nèi)路段,將其采樣區(qū)間限制在基于0.5個標準差倍數(shù)的劃分出邊緣區(qū)域,并限制其在邊緣區(qū)域采樣出噪聲向量,進而使用重參數(shù)技巧生成潛在變量。
38、進一步地,所述步驟s4中,所述vae模型的損失函數(shù)為:
39、
40、式中,表示路段樣本數(shù)據(jù)和生成數(shù)據(jù)之間的mse重建誤差,表示kl差值,超參數(shù)表示為
41、
42、式中,表示樣本數(shù)據(jù),表示采樣數(shù)據(jù),和均表示常數(shù),表示特定常識項,表示誤差與采樣周期的累加, n表示數(shù)據(jù)總數(shù)。
43、本發(fā)明的有益效果為:
44、(1)本發(fā)明方法中采用卡口數(shù)據(jù)生成車輛軌跡,并結(jié)合仿真技術(shù)模擬多種交通場景和車輛行為,通過生成多樣性的軌跡數(shù)據(jù),可以更全面地分析行駛速度變化、擁堵點以及不同時間段的交通擁堵情況,這種多樣性的數(shù)據(jù)不僅有助于識別交通擁堵的形成原因,還能為交通管理者制定更為精準的優(yōu)化策略和應(yīng)對方案提供重要依據(jù)。
45、(2)本發(fā)明方法結(jié)合圖神經(jīng)網(wǎng)絡(luò)和a*搜索算法重構(gòu)車輛軌跡;其中,啟發(fā)式搜索算法a*在本質(zhì)上解決了給定起始點情況下的路徑搜索問題。通過優(yōu)化啟發(fā)函數(shù),它可以有效地生成高質(zhì)量的近似解。圖神經(jīng)網(wǎng)絡(luò)在捕獲空間數(shù)據(jù)特征方面的強大使得它能夠自主學(xué)習(xí)路網(wǎng)中重要節(jié)點和給定車輛軌跡的數(shù)據(jù)映射。通過有向圖構(gòu)建出路網(wǎng)權(quán)重圖,搜索出的車輛軌跡完全遵循路網(wǎng)約束。
46、(3)本發(fā)明在基于序列的vae模型的基礎(chǔ)上,通過增加分區(qū)采樣形成β-trajvae生成模型,模型將路網(wǎng)權(quán)重圖作為輸入,通過分區(qū)采樣和優(yōu)化損失函數(shù),生成符合特征分布的多個路網(wǎng)權(quán)重圖,執(zhí)行a*搜索后生成多樣化軌跡。
47、綜上所述,車輛軌跡生成方法在交通管理過程中,不僅提供了必要的數(shù)據(jù)支持和決策依據(jù),還為城市交通的未來發(fā)展奠定了堅實的基礎(chǔ)。
- 還沒有人留言評論。精彩留言會獲得點贊!