檢測設備及粉塵濃度檢測方法與流程
本發明涉及粉塵濃度檢測,具體而言,涉及一種檢測設備及粉塵濃度檢測方法。
背景技術:
1、目前,空氣中懸浮的細小的粉塵顆粒不僅會引起人體呼吸系統疾病,還會導致城市及區域的能見度降低、建筑物腐蝕。因此,作業場所、城市環境中的粉塵質量濃度的測量對于人們的身體健康以及生活出行來說至關重要。
2、在現有技術中,粉塵質量濃度的檢測通常會使用到粉塵質量濃度傳感器,粉塵質量濃度傳感器只能夠檢測一定時間范圍內的粉塵質量濃度平均值,其檢測的并未時當前區域內的實時濃度值。
3、然而,對于一些通風力度較大的礦井作業場所,其空氣中的粉塵質量濃度的變化較為劇烈,粉塵質量濃度傳感器的檢測方式與礦井作業場所內的實際粉塵質量濃度之間的差別較大,嚴重影響工作人員的人身健康。
技術實現思路
1、本發明的主要目的在于提供一種檢測設備及粉塵濃度檢測方法,以解決現有技術中粉塵質量濃度檢測裝置無法進行實時檢測的問題。
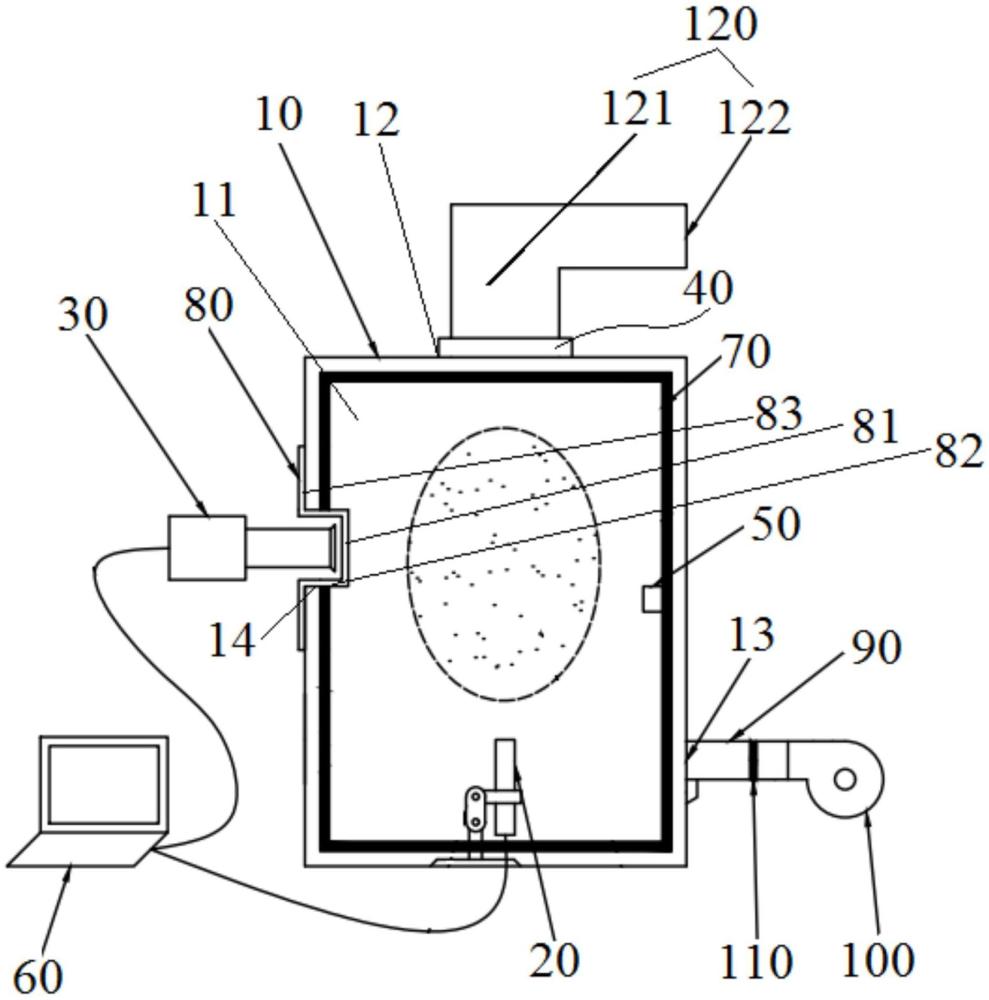
2、為了實現上述目的,根據本發明的一個方面,提供了一種檢測設備,用于檢測待檢測氣體的粉塵質量濃度,檢測設備包括:殼體,具有相互連通的檢測腔和進氣孔,進氣孔用于向檢測腔內輸送待檢測氣體;一字線激光器,設置在檢測腔內,一字線激光器用于發射一字線激光;圖像采集裝置,圖像采集裝置的攝像頭的中心軸線與一字線激光的激光面之間呈第一夾角設置,以用于采集一字線激光的激光面圖像;粒子計數器,粒子計數器設置檢測腔內,以用于對待檢測氣體內的不同粒徑大小的粉塵進行計數;檢測裝置,設置在檢測腔中,檢測裝置用于檢測待檢測氣體的粉塵質量濃度;處理模塊,處理模塊與圖像采集裝置、粒子計數器及檢測裝置均連接,處理模塊具有第一工作模式和第二工作模式,在處理模塊處于第一工作模式時,處理模塊根據激光面圖像、粒子計數器的計數值及檢測裝置的檢測值建立支持向量機模型;在處理模塊處于第二工作模式時,處理模塊基于支持向量機模型,根據激光面圖像和計數值計算待檢測氣體的粉塵質量濃度。
3、進一步地,檢測裝置還包括吸光結構,吸光結構設置在檢測腔的腔壁上,以用于吸收檢測腔內的光束;其中,至少部分吸光結構由吸光材料制成。
4、進一步地,殼體還具有與檢測腔連通的檢測口,圖像采集裝置設置在檢測腔外,檢測裝置還包括:封堵結構,封堵結構設置在檢測口處,以用于封堵檢測口;其中,至少部分封堵結構由透明材料制成,圖像采集裝置通過該部分封堵結構采集位于檢測腔內的一字線激光的激光面圖像。
5、進一步地,封堵結構包括:封堵本體,由透明材料制成;筒狀連接部,筒狀連接部的第一端伸入至檢測腔內,封堵本體設置在第一端上;環形止擋部,設置在筒狀連接部的第二端上,環形止擋部用于與殼體的至少部分外表面限位止擋;其中,圖像采集裝置的至少部分經由第二端伸入至筒狀連接部的內腔中。
6、進一步地,殼體還具有出氣孔,出氣孔通過檢測腔與進氣孔連通,檢測設備還包括:第一管狀結構,設置在出氣孔處;抽吸裝置,抽吸裝置通過第一管狀結構與檢測腔連通,抽吸裝置通過將位于檢測腔內的至少部分氣體抽出至殼體外,以使位于殼體外的待檢測氣體通過進氣孔流入至檢測腔中;其中,第一管狀結構內設置有過濾件。
7、根據本發明的另一方面,提供了一種粉塵濃度檢測方法,用于檢測待檢測氣體的粉塵質量濃度,粉塵濃度檢測方法適用于上述的檢測設備,粉塵濃度檢測方法包括:
8、步驟s1:操作檢測設備的圖像檢測裝置采集一字線激光器發射的一字線激光的激光面圖像;
9、步驟s2:獲取激光面圖像的平均灰度值、峰值信噪比及粒子計數器的計數值,將平均灰度值、峰值信噪比及計數值輸入至支持向量機模型內,以獲需粉塵質量濃度。
10、進一步地,在步驟s2中,建立支持向量機模型的方法包括:
11、步驟s21:通過檢測設備的抽吸裝置將檢測腔內預設體積的氣體抽吸至殼體外;
12、步驟s22:操作圖像檢測裝置采集一字線激光器發射的一字線激光的多張樣本激光面圖像;
13、步驟s23:處理模塊獲取各樣本激光面圖像的樣本平均灰度值和樣本峰值信噪比,處理模塊獲取粒子計數器對應各樣本激光面圖像在采集時的樣本計數值、處理模塊獲取粉塵濃度傳感器對應各樣本激光面圖像在采集時的樣本檢測值;其中,樣本激光面圖像和與該樣本激光面圖像對應的樣本平均灰度值、樣本峰值信噪比、樣本計數值及樣本檢測值形成一組樣本數據;
14、步驟s24:處理模塊選取至少一組樣本數據,并將該樣本數據內的樣本平均灰度值、樣本峰值信噪比及樣本計數值作為輸入變量,將該樣本數據內的樣本檢測值作為輸出變量,利用支持向量機模擬輸入變量與輸出變量之間的函數關系,以建立支持向量機模型。
15、進一步地,建立支持向量機模型的方法還包括:
16、步驟s25:處理模塊選取至少另一組樣本數據,并將該組樣本數據內的樣本平均灰度值、樣本峰值信噪比及樣本計數值輸入至支持向量機模型內,以得到預測粉塵質量濃度值a1;其中,若該組樣本數據內的樣本檢測值a2與預測粉塵質量濃度值a1之間滿足:1.08a2≤a1≤0.95a2,則判斷支持向量機模型合格。
17、進一步地,獲取激光面圖像的平均灰度值和峰值信噪比的方法包括:
18、步驟s26:處理模塊將激光面圖像轉換為灰度圖,并截取灰度圖中的中心散射區域;
19、步驟s27:基于中值濾波算法對中心散射區域進行濾波處理,以得到濾波圖像矩陣;
20、步驟s28:獲需濾波圖像矩陣內的各個像素點的坐標,以根據各個像素點的坐標計算峰值信噪比,計算峰值信噪比的公式為:
21、
22、其中,m為中心散射區域的長度值,n為中心散射區域的寬度值,r為中心散射區域進行濾波處理前的像素點的橫坐標和縱坐標,f為中心散射區域進行濾波處理后的像素點的橫坐標和縱坐標。
23、進一步地,獲取激光面圖像的平均灰度值和峰值信噪比的方法還包括:
24、步驟s29:基于大津二值化法對中心散射區域進行二值化處理;
25、步驟s30:基于最大-最小標準化法對二值化后的中心散射區域進行歸一化處理,以得到散射圖像矩陣;
26、步驟s31:將散射圖像矩陣與濾波圖像矩陣做哈達瑪積,以得到成品灰度圖;
27、步驟s32:處理模塊根據成品灰度圖獲需平均灰度值。
28、應用本發明的技術方案,檢測設備用于檢測待檢測氣體的粉塵質量濃度,檢測設備的殼體具有相互連通的檢測腔和進氣孔,進氣孔用于向檢測腔內輸送待檢測氣體,一字線激光器設置在檢測腔內,以用于發射一字線激光,圖像采集裝置的攝像頭的中心軸線與一字線激光的激光面之間呈第一夾角設置,以用于采集一字線激光的激光面圖像,粒子計數器設置檢測腔內,以用于對待檢測氣體內的不同粒徑大小的粉塵進行計數,檢測裝置設置在檢測腔中,以用于檢測待檢測氣體的粉塵質量濃度,處理模塊與圖像采集裝置、粒子計數器及檢測裝置均連接,處理模塊具有第一工作模式和第二工作模式,在處理模塊處于第一工作模式時,處理模塊根據激光面圖像、粒子計數器的計數值及檢測裝置的檢測值建立支持向量機模型;在處理模塊處于第二工作模式時,處理模塊基于支持向量機模型,根據激光面圖像和計數值計算待檢測氣體的粉塵質量濃度。這樣,檢測設備能夠根據激光面圖像、粒子計數器的計數值及檢測裝置的檢測值建立支持向量機模型,在支持向量機模型建立后,工作人員僅需通過進氣孔向檢測腔內持續輸送待檢測氣體,控制模塊即可基于支持向量機模型,以利用圖像采集裝置實時采集的激光面圖像和粒子計數器的實時計數值計算待檢測氣體的實時粉塵質量濃度,進而解決了現有技術中粉塵質量濃度檢測裝置無法進行實時檢測的問題,保障了工作人員的人身健康。
- 還沒有人留言評論。精彩留言會獲得點贊!