一種基于機器學習的激光雷達抗環境干擾識別方法及系統與流程
本發明涉及干擾識別,特別是一種基于機器學習的激光雷達抗環境干擾識別方法及系統。
背景技術:
1、脈沖激光雷達主要基于微波雷達測距原理,即時間飛行技術(tof)。激光雷達發射出激光信號,經過目標反射后回到接收端口,基于收發脈沖的時間間隔,就可以推斷出雷達與目標之間的距離。與微波雷達相比,激光雷達具有方向性好,不易受電磁環境干擾等優點。但同樣的,激光雷達也容易受到自然環境的干擾,如云、霧、雨、雪等自然天氣,以及煙霧等均會對激光雷達的探測性能產生影響。
2、傳統的一維激光雷達成本低、體積小,但由于其僅能采集距離和幅度信息,通常通過幅度和距離的對應關系對實體目標和云霧等環境干擾作區分。此外,如果提高激光雷達的距離分辨率,則可以從波形特征上對目標進行識別。但受激光發射器和探測器能力限制,環境干擾的回波形態也可能接近目標回波,利用人工經驗值進行波形特征上的區分難免誤差較大,且經驗特征值的分辨方法難以適應擴大的數據集。如果無法區分目標和云霧環境的回波,容易造成對目標距離的誤判。
3、此外,為提高激光雷達的抗干擾性能,在傳統一維激光雷達的基礎上,也可采用相干激光雷達、激光成像雷達等方案,但這些方法需要使用復雜的激光發射系統和接收系統,存在成本高、體積大的缺點。
技術實現思路
1、本發明的目的在于提供一種基于機器學習的激光雷達抗環境干擾識別方法及系統。用于解決背景技術所述的問題,具體技術方案如下:
2、第一方面,本發明提供一種基于機器學習的激光雷達抗環境干擾識別方法,所述方法包括:
3、將干擾數據和目標數據進行分類標記并進行特征值提取處理、歸一化處理、降維處理,確定降維特征值和標記數據;
4、基于所述降維特征值和所述標記數據在機器學習模型中訓練確定機器學習模型中的最優分類超平面;所述分類超平面為將所述降維特征值按照規則進行分類的函數,所述規則為數據集中的點到超平面的最小距離間隔最大,所述最優分類超平面為多個所述分類超平面中的最優解;
5、基于主成分矩陣和所述最優分類超平面對接收的激光雷達回波數據進行分類預測,識別所述激光雷達的探測結果,所述探測結果包括:識別為目標、識別為干擾;所述主成分矩陣為所述降維特征值向量化的矩陣,用于對所述激光雷達回波數據進行降維處理。
6、進一步的,所述將干擾數據和目標數據進行分類標記并進行特征值提取處理、歸一化處理、降維處理,確定降維特征值和標記數據,包括:
7、將采集到的干擾數據和目標數據進行分類標記并提取特征值,確定一維距離像的特征值數據;
8、將所述一維距離像的特征值數據進行歸一化處理,確定歸一化數據;
9、將所述歸一化數據進行降維處理,確定降維特征值和標記數據。
10、進一步的,在所述將干擾數據和目標數據進行分類標記并進行特征值提取處理、歸一化處理、降維處理之前,還包括:
11、采集復雜環境下的環境回波,確定所述干擾數據,所述環境回波包括:云、霧、雨、雪、煙塵的回波;
12、采集不同場景下的目標回波,確定所述目標數據。
13、進一步的,所述基于所述降維特征值和所述標記數據在機器學習模型中訓練確定機器學習模型中的最優分類超平面,包括:
14、確定所述機器學習中支持向量機模型訓練的目的,即訓練的目標函數;
15、在約束條件中增加松弛項參數,在所述目標函數中加入懲罰項;
16、通過核函數將所述降維特征值和所述標記數據映射到高維空間中;
17、在所述高維空間數據環境下進行訓練,確定所述最優分類超平面。
18、進一步的,所述基于主成分矩陣和所述最優分類超平面對接收的激光雷達回波數據進行分類預測,包括:
19、將實時采集的激光雷達回波數據進行特征值處理,確定激光特征值;
20、通過所述主成分矩陣對所述激光特征值進行降維處理,得到激光降維數據;
21、對所述激光降維數據進行歸一化處理確定數據矩陣;
22、利用支持向量和核函數,確定所述數據矩陣到所述最優分類超平面的距離,通過所述距離進行分類預測,所述距離為正識別為目標,所述距離為負識別為干擾。
23、第二方面,本發明還提供一種基于機器學習的激光雷達抗環境干擾識別系統,所述系統包括:訓練前處理模塊、訓練模塊、預測模塊;
24、所述訓練前處理模塊用于,將干擾數據和目標數據進行分類標記并進行特征值提取處理、歸一化處理、降維處理,確定降維特征值和標記數據;
25、所述訓練模塊用于,基于所述降維特征值和所述標記數據在機器學習模型中訓練確定機器學習模型中的最優分類超平面;所述分類超平面為將所述降維特征值按照規則進行分類的函數,所述規則為數據集中的點到超平面的最小距離間隔最大,所述最優分類超平面為多個所述分類超平面中的最優解;
26、所述預測模塊用于,基于主成分矩陣和所述最優分類超平面對接收的激光雷達回波數據進行分類預測,識別所述激光雷達的探測結果,所述探測結果包括:識別為目標、識別為干擾;所述主成分矩陣為所述降維特征值向量化的矩陣,用于對所述激光雷達回波數據進行降維處理。
27、第二方面的另一實施例中,所述訓練前處理模塊具體用于:
28、將采集到的干擾數據和目標數據進行分類標記并提取特征值,確定一維距離像的特征值數據;
29、將所述一維距離像的特征值數據進行歸一化處理,確定歸一化數據;
30、將所述歸一化數據進行降維處理,確定降維特征值和標記數據。
31、第二方面的另一實施例中,所述系統還包括:獲取模塊;
32、所述獲取模塊用于,采集復雜環境下的環境回波,確定所述干擾數據,所述環境回波包括:云、霧、雨、雪、煙塵的回波;采集不同場景下的目標回波,確定所述目標數據。
33、第二方面的另一實施例中,所述訓練模塊具體用于:
34、確定所述機器學習中支持向量機模型訓練的目的,即訓練的目標函數;
35、在約束條件中增加松弛項參數,在所述目標函數中加入懲罰項;
36、通過核函數將所述降維特征值和所述標記數據映射到高維空間中;
37、在所述高維空間數據環境下進行訓練,確定所述最優分類超平面。
38、第二方面的另一實施例中,所述預測模塊具體用于:
39、將實時采集的激光雷達回波數據進行特征值處理,確定激光特征值;
40、通過所述主成分矩陣對所述激光特征值進行降維處理,得到激光降維數據;
41、對所述激光降維數據進行歸一化處理確定數據矩陣;
42、利用支持向量和核函數,確定所述數據矩陣到所述最優分類超平面的距離,通過所述距離進行分類預測,所述距離為正識別為目標,所述距離為負識別為干擾。
43、本發明的有益效果如下:
44、本發明提供的一種基于機器學習的激光雷達抗環境干擾識別方法及系統具有如下優點:
45、1、在不增加硬件成本的基礎上,利用支持向量機機器學習算法對一維激光雷達采集到的回波進行干擾識別。
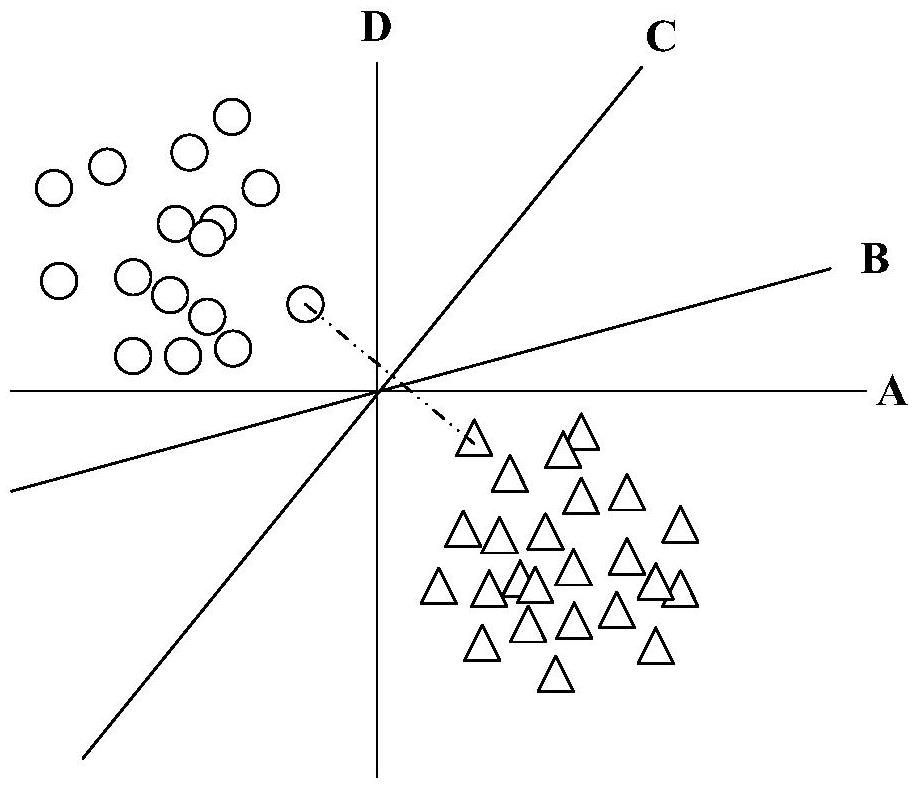
46、支持向量機被用于解決二分類問題。對于任意一組數據集,其中包含目標和干擾兩類回波數據。支持向量機將數據映射為空間中的點,則有無數條間隔可將兩類數據(目標和干擾)進行分隔,通過尋找其中一個間隔,使空間中的位于間隔兩側的點到間隔的最小距離最大,即尋找能夠最大限度將兩類數據區分開的間隔。如附圖1所示,對于兩組點集,間隔a、b、c、d均能將其區分開,而間隔c是能夠以最大距離將兩類數據分開的間隔。
47、基于支持向量機的激光雷達云霧干擾門限計算方法可以在不進行硬件更改基礎上,僅通過軟件算法就能對激光雷達回波進行目標和干擾的分辨,并大大降低了人工成本,提高了激光雷達的目標識別能力和距離測量準確度。
48、2.可隨數據集擴充對識別模型進行優化。
49、基于支持向量機的抗云霧干擾方法可隨數據集擴充對算法進行優化。如果目標的特征產生變化,或采集到更多的干擾特征數據后,可在原有的分類模型上對新擴充的數據進行分辨。如果原模型對擴充數據集的識別效果不佳,則可以基于擴充后的數據集進行重新訓練,建立新的干擾分辨模型。
50、3.在線處理時間短、實時性高。
51、基于支持向量機的抗云霧干擾方法雖然需要大量的測試數據對模型進行訓練,但該過程可在線下進行。通過支持向量機算法基于測試數據訓練出有效分類模型后,實際激光雷達的識別應用中只需要將模型參數寫入預先設好的程序中,在對信號的實時檢測過程中,可以很快根據模型獲得當前時刻回波數據的判決結果——目標或干擾,并進行距離檢測,處理時間僅有毫秒甚至微秒級,因此可以實現抗干擾下的實時距離檢測。
52、4.降低數據處理復雜度和人工誤差。
53、在人工進行波形特征值提取后,利用主成分分析法(pca)對提取出的特征值進行降維,以較少數的綜合特征取代原有的多維變量,簡化數據結構,把原指標綜合成較少幾個主成分,再以這幾個主成分的貢獻率為權數進行加權平均,構造出一個綜合評價函數。尤其提取出的特征和權重更為客觀合理,避免了認為人工提取特征值所存在的缺陷。
- 還沒有人留言評論。精彩留言會獲得點贊!