一種基于星載主被動遙感融合的海霧三維分布探測方法
本發明涉及大氣遙感監測領域,尤其涉及一種基于星載主被動遙感融合的海霧三維分布探測方法。
背景技術:
1、海霧是海洋上低層大氣中的一種水汽凝結(華)現象,由水滴或冰晶(或二者皆有)的大量積聚而形成,能夠使水平能見度降低到1公里以下。作為海洋或沿海區域常見的一種氣象災害,海霧直接影響空中、海上以及陸地上的交通運輸,同時也對通信、捕撈、海上軍事活動等造成很大的不便。因此,海霧的形成、擴散機制和時空分布一直是國內外學者的研究重點。為了更好地明確海霧的形成、演化和消散等過程,需要準確地掌握其立體分布信息。高精度的三維海霧分布格點數據可以作為預測海霧形成、擴散與消散的初始場輸入,提升海霧預測的準確性。
2、由于海洋中氣象站點分布稀疏,為了滿足獲取大范圍、高質量的海霧觀測數據資料的需求,星載被動遙感已成為海霧監測的重要手段,它具有觀察范圍大、實時性高、信息量豐富等優點。然而,由于海霧和層云在各通道輻射和亮溫極高的相似性,如何區分這兩者一直是海霧監測的難點。這兩者的區別僅僅在于海霧的層底是緊貼海洋表面的,而層云的層底要高出海洋表面一定距離。
3、僅僅依靠被動遙感,很難獲取到云霧垂直結構的信息,不論是高云的遮擋,抑或是低層云與海霧之間的誤判,都制約了被動遙感探測海霧的準確率。不同于被動遙感,星載激光雷達等主動遙感可以獲取大氣的垂直結構,并且具有將海霧和低層云區分開的潛力。
4、然而,星載主動遙感(激光雷達、云雷達等)也有明顯的缺點,其觀測目標順著飛行方向,沿星下軌道成點狀排布,幅寬極小,僅僅在其軌道覆蓋范圍上實現了三維觀測。而海霧的范圍通常是較大的,利用星載激光雷達僅僅獲取一個剖面的信息并不足以支撐完整海域的海霧三維監測。
5、授權公告號為cn?114022782a的發明專利公開了一種基于modis衛星數據的海霧探測方法,包括對modis衛星數據預處理并進行特征提取;結合caliop?vfm衛星數據進行地物樣本選取并劃分訓練集及測試集;以節點熵的信息增益率作為節點分裂的雜質判據,并對典型相關森林中每顆典型相關樹賦予權值,利用訓練集進行訓練得到改進典型相關森林模型;在后測試時對每顆典型相關樹權值進行調整更新,得到不斷優化的改進典型相關森林模型;利用模型對衛星圖像進行識別得到海霧識別結果。
6、目前現有技術中,海霧分布探測算法主要針對海霧覆蓋范圍進行探測,依賴于星載被動遙感的多通道光譜數據,而沒有充分利用星載主動遙感的垂直結構探測能力,導致海霧分布探測結果僅限于二維平面。因此,需要構建基于星載主被動遙感融合的海霧三維分布探測方法,這有利于構建高精度海霧三維模型,進而更好地進行海霧機理研究及預報。
技術實現思路
1、為解決已有的星載海霧分布探測算法大多只得到二維分布,無法進行大范圍海霧層次高度分布的問題,本發明提出了一種基于星載主被動遙感融合的海霧三維分布探測方法,該算法將星載激光雷達獲取的532nm衰減后向散射系數、散射比和后向散射系數以及靜止衛星的多波段反照率或亮溫數據作為輸入,進行海霧層次識別以及海霧三維結構構建,從而獲得連續、高空間分辨率的海霧層次三維分布信息。
2、具體采用的技術方案如下:
3、一種基于星載主被動遙感融合的海霧三維分布探測方法,包括以下步驟:
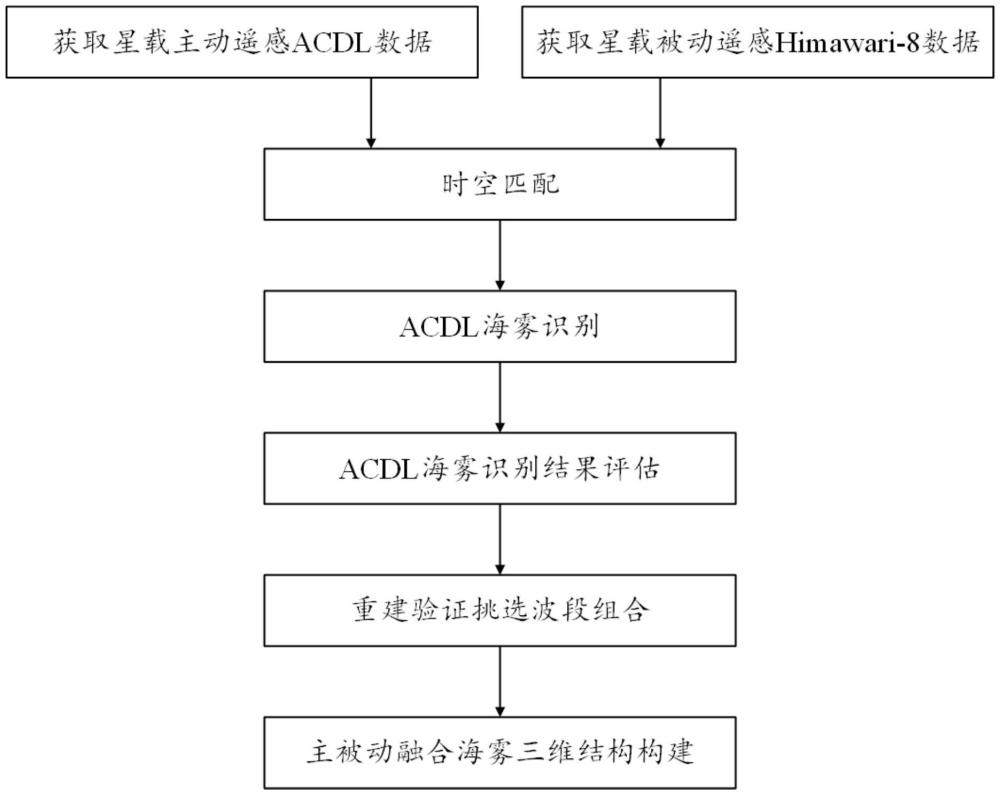
4、(1)獲取星載激光雷達遙感觀測數據作為主動遙感數據,包括獲取水平級別1(即level?1)經過校準的衰減后向散射系數,同時獲取對應的水平級別2(即level?2)的后向散射系數、以及散射比,作為后續識別海霧層次的依據;獲取靜止衛星的遙感觀測數據作為被動遙感數據,包括多波段光譜信息,具體包括可見光和近紅外波段各通道的反照率以及紅外波段各通道的亮溫;進行星載激光雷達的遙感觀測數據和靜止衛星的遙感觀測數據的時空匹配;
5、(2)通過光學特性判據,設定散射比、衰減后向散射系數以及后向散射系數的閾值,基于閾值區分探測剖面中的云和氣溶膠層次;通過物理位置判據,發揮星載激光雷達垂直探測優勢,通過篩選距離海面上空一定閾值范圍內的云層次,將篩選層次中的像素點識別為海霧;再此基礎上,通過層次連續性判據,獲得完整連續的海霧層次;
6、(3)將步驟(2)中的海霧識別結果與國際綜合海洋-大氣數據集icoads中的實際觀測數據進行對比,分析步驟(2)海霧識別的準確率;
7、(4)基于時空匹配的星載激光雷達垂直探測剖面與靜止衛星的多波段光譜信息,通過分析星載激光雷達軌道外點與軌道上點的多通道光譜相似度,將實測垂直剖面的信息拓展到軌道外一定范圍內;
8、(5)采用步驟(4)中的方法重建星載激光雷達的垂直探測剖面,對比選擇不同波段情況下重建前后的海霧層高,以選取最適合海霧層高分布探測的波段組合;
9、(6)應用步驟(4)的方法,結合步驟(5)所選擇的波段組合,構建出距離星載激光雷達軌道一定范圍內的海霧三維分布。
10、本發明將星載激光雷達的高精度大氣垂直剖面探測能力與靜止衛星的大范圍連續觀測能力相結合,基于主被動融合方法實現海霧三維分布探測,能夠有效地擴展衛星三維探測范圍,提升海霧和低云的區分能力。
11、優選地,步驟(1)中,獲取通道衰減后向散射系數、散射比、后向散射系數是為了更好地海霧識別,當然,還可以獲得消光系數、退偏比、以及雷達比等光學特性參數,這些光學特性參數可以輔助進行海霧識別。通常來說,海霧相比氣溶膠,具有更強的后向散射、更小的激光雷達比,對激光雷達信號的衰減更強,更大的散射比,并且層次的邊緣更清晰。
12、海霧識別的難點主要在于將其與層云區分開來。層云屬于低云族,云底距地表或洋面高度通常小于2km,常常會嚴重影響航空飛行的安全與穩定,云中大量的水汽也會干擾通訊電磁波信號。而海霧與層云的最主要區別在于層云不與表面直接相連而海霧的底部與洋面直接接觸,兩者在物理性質上并無明顯區別。由于無法獲取高精度的層次信息,被動遙感往往難以準確將海霧和層云區分開。因此,在步驟(2)中,需要充分發揮星載激光雷達的高分辨率大氣垂直剖面探測能力,準確地獲取層次高度,提升區分海霧和層云的能力。
13、優選地,步驟(2)中,所述的光學特性判據閾值來源于大量歷史觀測結果。根據地基激光雷達的長期觀測數據,區分云氣溶膠的光學特性判別公式為:
14、sr>10
15、atb≥0.02km-1sr-1
16、β≥0.03km-1sr-1
17、其中sr為散射比,atb為衰減后向散射系數,β為后向散射系數。當同時滿足上述sr、atb、以及β的閾值時,則認為是云,否則為氣溶膠。
18、當消光系數、退偏比、以及雷達比進行輔助海霧識別時,滿足散射比小于10、退偏比大于0.15且雷達比小于40的可以認為可能是云。云的消光系數由于多次散射,往往會隨著云的厚度增加而變大,因此這也可用于輔助海霧識別。
19、優選地,步驟(2)中,所述的篩選距離海面上空一定閾值范圍內的云層次,通過星載激光雷達獲取準確的云底高度,計算其與海表的距離,作為區分海霧和層云的依據,將該距離內的像素點識別為海霧。基于caliop的方法指出,caliop的vfm數據可能會將海霧誤識別為海表。由于星載激光雷達同時搭載了測高載荷,擁有表面高程的實時測量數據,因此利用星載激光雷達獲取海霧層次則不會存在這個問題。
20、優選地,步驟(2)中,通過層次連續性判據,獲得完整連續的海霧層次的方法為:對于每個已識別為海霧的像素點,與其直接相連的像素點若滿足光學特性判據,則該直接相連的像素點被認定為海霧。
21、優選地,步驟(3)中,在進行比較時,篩選的是時間間隔小于2小時,空間距離小于100km的海霧識別結果中的軌跡點與icoads數據點進行比較,若兩者均識別為海霧或均識別為無海霧,則判定為識別準確;若識別為海霧而icoads未記錄海霧,則判定為誤識別;若未識別為海霧而icoads記錄為海霧,則判定為缺失,統計所有匹配案例,分析準確率、缺失率和誤識別率,從而判斷本方法的準確性。
22、優選地,步驟(4)中,融合主被動遙感探測數據,將實測垂直剖面的信息拓展到軌道外一定范圍內的方法的基本假設為:在地理位置接近、并且地表類型等背景條件相似的情況下,如果兩個像素點在被動遙感數據中,涉及云、氣溶膠等大氣特征的多個光譜通道中的輻射量相近,則可以認為這兩個像素點的云和氣溶膠的垂直結構也相似。在主動遙感與被動遙感同時探測的區域中,云和氣溶膠的垂直結構以及各波段的光譜信息已知,這些信息可以作為擴展過程中的“供體”。而軌道之外的像素點僅有被動遙感的各波段光譜信息,因此,這些像素點可以作為“受體”,通過選擇與自身光譜信息足夠相似的“供體”點進行匹配。
23、優選地,步驟(4)中,通過分析星載激光雷達軌道外點與軌道上點的多通道光譜相似度,將實測垂直剖面的信息拓展到軌道外一定范圍內:
24、首先,記錄achsrl(aerosol-cloud?high-spectral-resolution?lidar,星載高光譜分辨率激光雷達)軌跡上的供體像素點和achsrl軌跡之外待擴展區域的受體像素點的位置信息;achsrl軌跡上“供體”像素點的坐標為(a,0),a∈[0,i],記需要構建的幅寬范圍為主動軌道兩側距離為j個像素點的范圍,那么需要構建的受體像素點的坐標為(i,j),j∈[-j,0)∪(0,j];
25、然后,利用供體像素點與受體像素點的多通道的反照率或亮溫數據的加權最小方差來計算損失函數c(i,j;a):
26、
27、其中alm為靜止衛星所選擇參與光譜相似度比較的第m個通道的反照率,btn為第n個通道的亮溫;
28、接下來,基于背景約束條件以及距離指數挑選最合適的供體像素點;背景約束條件有:1)受體像素點與供體像素點具有相同的地表類型;2)受體像素點與供體像素點具有相近的太陽天頂角及方位角,即太陽天頂角及方位角差距小于10°,最佳的供體是在滿足上述約束條件下,在所有待選供體像素點中挑選具有與受體像素點代價函數最小的一部分像素點集合,再在其中選擇距離最近的點;
29、最后,在目標區域內,用供體像素點的垂直剖面信息作為匹配的每個受體像素點的垂直剖面信息,以此來構建海霧的三維結構。
30、優選地,步驟(5)中,利用重建算法對波段組合進行選擇。通過設定盲區范圍為30km、60km、100km對如下波段組合進行了測試:組合1:與modis所選波段最接近,即0.64μm,2.3μm,8.6μm以及12.4μm;組合2:日間海霧監測常用到的波段,即0.64μm,0.86μm以及1.6μm;組合3:日間與夜間海霧監測常用波段組合,即0.64μm,0.86μm,1.6μm,3.9μm以及11.2μm;組合4:所有靜止衛星波段。通過對比分析重建前后的剖面,評估總體匹配率tmr以及重建前后海霧高度的均方根誤差,得到最有利于進行海霧三維結構拓展的波段組合,tmr的定義為:
31、tmr=(ncc+naa+nff+n00)/n
32、其中ncc為重建前后均識別為云的像素點數量,naa為重建前后均識別為氣溶膠的像素點數量,nff為重建前后均識別為海霧的像素點數量,n00為重建前后均識別為clear(即無云氣溶膠)的像素點數量。經篩選得到最適合海霧三維分布探測的波段組合為0.64μm,2.3μm,8.6μm和12.4μm。
33、優選地,步驟(6)中,構建出距離acdl軌道一定范圍內的海霧三維分布的方法為:選擇與待擴展點光譜相似度最高的已知點的廓線,將其外移至帶擴展點處,從而獲取完整的海霧三維結構,得到海霧層高的分布。
34、優選地,步驟(6)中,所述的構建出距離acdl軌道一定范圍內的海霧三維分布,這個距離在步驟(5)的重建驗證中也進行了評估。
35、與現有技術相比,本發明具有的有益效果為:
36、(1)本發明的基于星載主被動遙感融合的海霧三維分布探測方法,將acdl的高精度大氣垂直剖面探測能力與himawari-8的大范圍連續觀測能力相結合,實現海霧三維分布探測,能夠有效地擴展衛星三維探測范圍。
37、(2)本發明的基于星載主被動遙感融合的海霧三維分布探測方法得到的海霧識別結果與時空匹配的icoads記錄對比結果顯示,準確率達到90%以上,缺失率在1%左右,誤識別率約為9%。
38、(3)相較于已有方法的星載遙感海霧層次分布探測算法,本發明方法具有高空間分辨率、可探測垂直方向層次等優勢,適用于多場景,有助于理解海霧形成、消散機理,也可作為海霧預報的高精度三維初始場。
- 還沒有人留言評論。精彩留言會獲得點贊!