一種基于2D-FIPM的聲納目標(biāo)距離-角度無網(wǎng)格估計(jì)快速方法
本發(fā)明屬于目標(biāo)探測(cè)定位,尤其涉及一種基于2d-fipm的聲納目標(biāo)距離-角度無網(wǎng)格估計(jì)快速方法。
背景技術(shù):
1、在主動(dòng)聲納系統(tǒng)中,實(shí)現(xiàn)精確的距離和角度估計(jì)對(duì)于目標(biāo)探測(cè)和定位具有至關(guān)重要的意義。這些系統(tǒng)依賴于發(fā)射聲波并捕捉從目標(biāo)反射回來的回聲信號(hào)來執(zhí)行其功能。近年來,隨著壓縮感知(compressed?sensing,cs)理論的興起,眾多基于該理論的方法被廣泛應(yīng)用于位置參數(shù)估計(jì)領(lǐng)域,并展現(xiàn)出卓越的性能。特別是在面對(duì)具有挑戰(zhàn)性的環(huán)境,如相干信源目標(biāo)、有限的回波數(shù)據(jù)等情況下,這些基于cs的方法表現(xiàn)出了其在位置參數(shù)估計(jì)方面的顯著優(yōu)勢(shì)。這種優(yōu)勢(shì)的核心在于壓縮感知理論的基本原則:如果一個(gè)信號(hào)在某個(gè)域內(nèi)是稀疏的,那么即使測(cè)量值遠(yuǎn)少于傳統(tǒng)方法所需的數(shù)量,也能夠從這些測(cè)量值中恢復(fù)出該信號(hào)。在壓縮感知的視角下,空間信號(hào)僅以存在或不存在的形式呈現(xiàn),不受相干性或非相干性的限制,因此也不受協(xié)方差矩陣恢復(fù)質(zhì)量的約束,提供了更為寬松的目標(biāo)信號(hào)識(shí)別條件。在聲納系統(tǒng)的背景下,這意味著即使只有有限的聲納回波數(shù)據(jù),也能夠從中恢復(fù)出目標(biāo)的距離和角度信息,而無需依賴于完整的數(shù)據(jù)集和噪聲統(tǒng)計(jì)假設(shè)。
2、現(xiàn)有的聲納信號(hào)處理方法,尤其是那些基于稀疏表示的位置參數(shù)估計(jì)方法,通常依賴于對(duì)信號(hào)參數(shù)域的離散化處理,以便在預(yù)定義的網(wǎng)格上執(zhí)行處理和分析。然而,這種方法的一個(gè)主要局限性在于所謂的“網(wǎng)格失配問題”,即實(shí)際的目標(biāo)參數(shù)可能不會(huì)完全對(duì)應(yīng)于預(yù)定義的網(wǎng)格點(diǎn),從而降低了估計(jì)的精度。這種問題的出現(xiàn),限制了傳統(tǒng)方法在處理非網(wǎng)格對(duì)齊目標(biāo)參數(shù)時(shí)的效能,凸顯了對(duì)新型解決方案的需求。
3、具體來說,距離-角度估計(jì)技術(shù)的發(fā)展目前已經(jīng)涵蓋了多種方案,包括基于子空間方法開發(fā)的二維旋轉(zhuǎn)子空間不變技術(shù)(2d?estimation?of?signal?parameters?viarotational?invariance?techniques,2d-esprit)方法及其加速fft-esprit方法、基于網(wǎng)格稀疏的二維正交匹配追蹤(2d?orthogonal?matching?pursuit,2d-omp)方法,基于無網(wǎng)格稀疏的解耦原子范數(shù)最小化(decoupled?atomic?norm?minimization,danm)方法及其加速交替乘子法方法(alternating?direction?method?of?multipliers,admm)開發(fā)的danm-admm。
4、2d-esprit是一種經(jīng)典的子空間方法,它通過利用信號(hào)子空間的旋轉(zhuǎn)不變性質(zhì)來估計(jì)信號(hào)的到達(dá)角度和到達(dá)時(shí)間(或距離)。這種方法以其在二維空間中對(duì)信號(hào)參數(shù)進(jìn)行估計(jì)的能力而受到青睞,但是仍然受到計(jì)算復(fù)雜度高的困擾,尤其在大規(guī)模計(jì)算情況下。2d-omp是一種基于壓縮感知理論的網(wǎng)格稀疏方法,它通過迭代地選擇與觀測(cè)數(shù)據(jù)最匹配的網(wǎng)格點(diǎn)來估計(jì)目標(biāo)參數(shù)。這種方法的優(yōu)勢(shì)在于其能夠在預(yù)定義的網(wǎng)格上進(jìn)行快速搜索,從而在一定程度上減少了計(jì)算復(fù)雜度。然而,2d-omp受限于網(wǎng)格設(shè)置,當(dāng)目標(biāo)參數(shù)與網(wǎng)格點(diǎn)不匹配時(shí),其性能會(huì)受到影響,這限制了它在復(fù)雜環(huán)境中的應(yīng)用。danm方法是一種無網(wǎng)格稀疏方法,它通過最小化原子范數(shù)來估計(jì)信號(hào)的參數(shù)。這種方法不依賴于預(yù)定義的網(wǎng)格,能夠直接在連續(xù)域中進(jìn)行優(yōu)化,從而避免了網(wǎng)格失配問題。danm在估計(jì)精度方面表現(xiàn)出色,尤其在目標(biāo)參數(shù)位于非網(wǎng)格點(diǎn)時(shí),但其計(jì)算復(fù)雜度較高,尤其是在處理大規(guī)模數(shù)據(jù)集時(shí)。admm是一種用于解決大型優(yōu)化問題的迭代算法,它通過將問題分解為更小的子問題來簡(jiǎn)化優(yōu)化過程。在danm問題的背景下,admm被用來加速問題的求解,通過迭代地更新變量來達(dá)到解決方案。盡管admm在每次迭代中的計(jì)算復(fù)雜度較低,但由于其作為近端方法的性質(zhì),通常需要更多的迭代次數(shù)才能達(dá)到最優(yōu)解,這在一定程度上限制了其在實(shí)時(shí)或近實(shí)時(shí)應(yīng)用中的性能。
5、這些方案的局限性主要集中在不能很好的平衡精度與計(jì)算時(shí)間之間的需求,在高精度探測(cè)的技術(shù)要求下無法做到快速實(shí)時(shí)有效的位置參數(shù)估計(jì)。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的在于克服現(xiàn)有技術(shù)缺陷,提出了一種基于2d-fipm的聲納目標(biāo)距離-角度無網(wǎng)格估計(jì)快速方法。
2、有鑒于此,本發(fā)明提出了一種基于2d-fipm的聲納目標(biāo)距離-角度無網(wǎng)格估計(jì)快速方法,用于主動(dòng)聲納系統(tǒng)根據(jù)接收信號(hào)進(jìn)行目標(biāo)距離和角度估計(jì),包括:
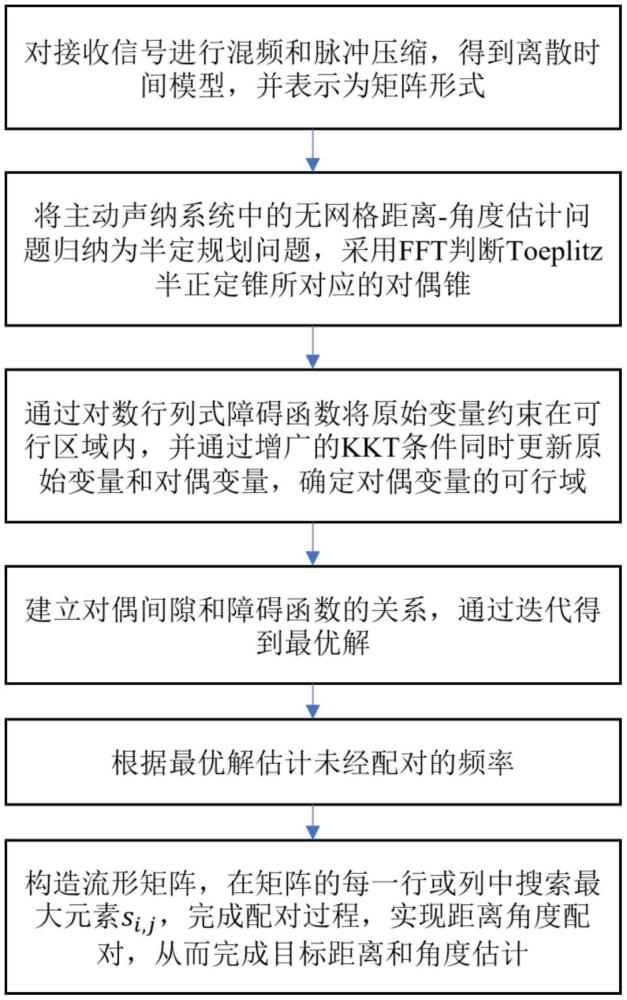
3、步驟1)對(duì)接收信號(hào)進(jìn)行混頻和脈沖壓縮,得到離散時(shí)間模型,并表示為矩陣形式;
4、步驟2)將主動(dòng)聲納系統(tǒng)中的無網(wǎng)格距離-角度估計(jì)問題歸納為半定規(guī)劃問題,采用fft判斷toeplitz半正定錐所對(duì)應(yīng)的對(duì)偶錐;
5、步驟3)通過對(duì)數(shù)行列式障礙函數(shù)將原始變量約束在可行區(qū)域內(nèi),并通過增廣的kkt條件同時(shí)更新原始變量和對(duì)偶變量,確定對(duì)偶變量的可行域;
6、步驟4)建立對(duì)偶間隙和障礙函數(shù)的關(guān)系,通過迭代得到最優(yōu)解,
7、步驟5)根據(jù)最優(yōu)解估計(jì)未經(jīng)配對(duì)的頻率;
8、步驟6)構(gòu)造流形矩陣,在矩陣的每一行或列中搜索最大元素,完成配對(duì)過程,實(shí)現(xiàn)距離角度配對(duì),從而完成目標(biāo)距離和角度估計(jì)。
9、優(yōu)選的,所述主動(dòng)聲納為具有m個(gè)相同元素,元素間距d=λ/2的均勻線性陣列,λ是工作波長(zhǎng)。
10、優(yōu)選的,所述步驟1)的離散時(shí)間模型為:
11、
12、其中,ym(n)為第m個(gè)天線元素接收到的信號(hào),ts表示采樣間隔,ak表示第k個(gè)目標(biāo)的后向散射系數(shù),k表示目標(biāo)總數(shù),exp(-j2πmβk)表示第k個(gè)目標(biāo)的回聲到達(dá)第m個(gè)陣列元素時(shí)產(chǎn)生的相位偏移,fc是載波頻率,噪聲項(xiàng)em表示第m個(gè)陣列元素上的加性高斯白噪聲,τk為第k個(gè)目標(biāo)的時(shí)間延遲,c是聲波在水下的傳播速度,μ為lfm信號(hào)的頻率變化率。
13、優(yōu)選的,所述步驟1)的矩陣形式y(tǒng)為:
14、y=x+e,
15、其中矩陣x為待恢復(fù)的理想稀疏信號(hào),是加性高斯白噪聲矩陣。
16、優(yōu)選的,所述步驟2)的半定規(guī)劃問題為:
17、
18、其中,η為權(quán)重正則化參數(shù),σ表示獨(dú)立同分布高斯噪聲的方差,表示噪聲控制項(xiàng),x,ux和uy表示優(yōu)化問題的優(yōu)化變量,和是由toeplitz算子映射的一級(jí)toeplitz矩陣,n和m分別表示采樣長(zhǎng)度和陣列元素?cái)?shù)目。
19、優(yōu)選的,所述步驟2)采用fft判斷toeplitz半正定錐所對(duì)應(yīng)的對(duì)偶錐,包括:當(dāng)滿足下式,對(duì)偶變量z位于對(duì)偶錐內(nèi):
20、
21、其中是實(shí)向量z的復(fù)值表示,f表示傅里葉變換頻率,exp(-j2πnf)表示傅里葉變換的旋轉(zhuǎn)因子。
22、優(yōu)選的,所述步驟3)對(duì)數(shù)行列式障礙函數(shù)f(μ)為:
23、
24、其中r(μ)=t(uy)-xht-1(ux)x;
25、障礙函數(shù)的度數(shù)df為:
26、df=n+m
27、通過將障礙函數(shù)作為懲罰項(xiàng)引入優(yōu)化問題,通過迭代解決以下問題來求解步驟2)的半定規(guī)劃問題:
28、minf(μ)+t-1f(μ)
29、其中t>0為障礙參數(shù);
30、通過增廣的kkt條件同時(shí)更新原始變量μ=[uyt,vec(x)t,uxt]t和對(duì)偶變量確定對(duì)偶變量的可行域;包括:
31、設(shè)定當(dāng)前迭代次數(shù)i,障礙參數(shù)ti,t組差分向量δux,i,δψi,δψi,梯度向量以及hessian矩陣近似值hi,
32、計(jì)算搜索方向
33、從k=i-1,i-2,...,max(i-t,1)遍歷求解阻尼因子牛頓近似方向
34、使用更新搜索方向:從k=max(i-t,1)遍歷,求解修正因子更新搜索方向d=d+δux,k(χk-δk);
35、根據(jù)下式更新原始解μ=[uyt,vec(x)t,uxt]t中的:ux,i=ux,i-1+σd
36、根據(jù)以下步驟更新由原始解和對(duì)偶解構(gòu)成的中心路徑(μi,λi):
37、其中對(duì)偶解其中:
38、
39、原始解
40、
41、其中,為是單位向量,其第一個(gè)元素等于1,其余元素等于0;
42、確定對(duì)偶變量的可行域flb=max(g(λi),flb)。
43、優(yōu)選的,所述步驟4)包括:
44、定義下界flb=max(g(λi),flb),根據(jù)下式更新對(duì)偶間隙ηi:
45、ηi=f(μi)-flb.
46、對(duì)偶間隙ηi和障礙參數(shù)ti之間的關(guān)系為:
47、
48、通過引入乘子γ>1調(diào)整對(duì)偶間隙的變化,更新下一個(gè)迭代的障礙參數(shù)ti+1為:
49、
50、通過不斷迭代地增大障礙參數(shù)ti,對(duì)偶間隙ηi被有效地減小,使得(μi,λi)逐漸接近最優(yōu)解(μ*,λ)。
51、優(yōu)選的,所述步驟5)包括:
52、基于最優(yōu)的ux*和uy*,通過vandermonde分解從相應(yīng)的toeplitz矩陣中提取最優(yōu)的歸一化頻率估計(jì)α*和β*:
53、
54、其中,dα,dβ≥0是對(duì)角矩陣。
55、優(yōu)選的,所述步驟6)包括:
56、構(gòu)造流形矩陣a(α*)和b(β*),通過下式得到矩陣d的估計(jì)d:
57、
58、在矩陣|d|的每一行或列中搜索最大元素sij,其中是矩陣|d|中第i行第j列的元素,若則與配對(duì),完成配對(duì)過程,得到對(duì)應(yīng)配對(duì)的根據(jù)下式得到目標(biāo)距離估值和角度估值
59、
60、其中,c是聲波在水下的傳播速度,λ為波長(zhǎng)。
61、與現(xiàn)有技術(shù)相比,本發(fā)明的優(yōu)勢(shì)在于:
62、1、本發(fā)明利用聲納接收信號(hào)的稀疏結(jié)構(gòu),將有效的參數(shù)信息重新排列,構(gòu)造了一個(gè)能夠以無網(wǎng)格稀疏理論來求解的danm優(yōu)化問題,從而使得本發(fā)明具有更高的分辨率。除此之外,2d-fipm算法的應(yīng)用,顯著降低了每次迭代的計(jì)算復(fù)雜度,從o(n3)降低到o(n2),使得算法能夠更快速地處理大規(guī)模數(shù)據(jù)集,相比于以往類似的算法,在保持高精度的前提下,提高了計(jì)算效率。
63、2、本發(fā)明的算法結(jié)構(gòu)清晰,實(shí)現(xiàn)簡(jiǎn)單,易于與其他聲納系統(tǒng)組件集成,有利于現(xiàn)有系統(tǒng)的升級(jí)和新系統(tǒng)的研發(fā)。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!