一種五相電機(jī)開(kāi)路故障診斷方法與流程
本發(fā)明涉及電機(jī)在線診斷領(lǐng)域,尤其涉及一種五相電機(jī)開(kāi)路故障診斷方法。
背景技術(shù):
1、近年來(lái),隨著低空經(jīng)濟(jì)的迅速崛起,無(wú)人機(jī)技術(shù)在物流運(yùn)輸、農(nóng)業(yè)監(jiān)測(cè)和環(huán)境保護(hù)等領(lǐng)域的應(yīng)用日益廣泛。作為低空經(jīng)濟(jì)的核心組成部分,無(wú)人機(jī)的性能和可靠性直接影響到相關(guān)行業(yè)的效率與安全。而在無(wú)人機(jī)的電機(jī)驅(qū)動(dòng)系統(tǒng)中,電機(jī)的在線故障診斷尤為重要,尤其是繞組開(kāi)路故障可能導(dǎo)致無(wú)人機(jī)失去動(dòng)力或控制,進(jìn)而引發(fā)嚴(yán)重事故。目前,大多數(shù)現(xiàn)有的在線診斷方法依賴于定期檢查和人工維護(hù),無(wú)法實(shí)現(xiàn)對(duì)電機(jī)狀態(tài)的實(shí)時(shí)監(jiān)控,也缺乏及時(shí)的應(yīng)急響應(yīng)機(jī)制。因此,迫切需要一種創(chuàng)新的電機(jī)驅(qū)動(dòng)系統(tǒng)開(kāi)路故障在線診斷技術(shù),以提升無(wú)人機(jī)的安全性和可靠性,從而為低空經(jīng)濟(jì)的可持續(xù)發(fā)展提供保障。
2、電機(jī)驅(qū)動(dòng)系統(tǒng)故障通常包括繞組故障和功率管故障。現(xiàn)有的電機(jī)在線診斷方法根據(jù)所選取特征值的不同,可分為信號(hào)處理方法、解析模型方法和數(shù)據(jù)驅(qū)動(dòng)方法。然而,這些方法在實(shí)際應(yīng)用中各有不足。信號(hào)處理方法依賴于從復(fù)雜信號(hào)中提取故障特征,但在高噪聲環(huán)境下其診斷精度較低,同時(shí)由于計(jì)算量大,實(shí)時(shí)性較差。解析模型方法則需要精確的電機(jī)數(shù)學(xué)模型,但在實(shí)際應(yīng)用中,由于電機(jī)的數(shù)學(xué)模型與實(shí)際工況之間存在不可避免的差異,導(dǎo)致其適應(yīng)性較差,特別是在多參數(shù)故障診斷時(shí),往往難以應(yīng)對(duì)復(fù)雜的故障情形,且建模過(guò)程復(fù)雜,需要較高的專業(yè)知識(shí)。數(shù)據(jù)驅(qū)動(dòng)方法雖然能基于大量的故障數(shù)據(jù)建立診斷數(shù)據(jù)庫(kù),但也要求較高的計(jì)算資源,且往往受限于現(xiàn)有的數(shù)據(jù)采集與處理能力。因此,現(xiàn)有的在線診斷方法在準(zhǔn)確性、適應(yīng)性和實(shí)時(shí)性方面仍存在改進(jìn)空間,亟需進(jìn)一步優(yōu)化,以適應(yīng)電機(jī)系統(tǒng)多樣化和高實(shí)時(shí)性的在線診斷需求。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的是克服背景技術(shù)中存在的上述缺陷,提供一種五相電機(jī)開(kāi)路故障診斷方法,使其不需要故障時(shí)的電機(jī)參數(shù),不需要添加額外的硬件電路,診斷算法簡(jiǎn)單,診斷速度快,防誤診斷能力強(qiáng),能夠快速精確的診斷出電機(jī)的繞組開(kāi)路故障和功率管開(kāi)路故障。
2、本發(fā)明為解決上述技術(shù)問(wèn)題采用以下技術(shù)方案:
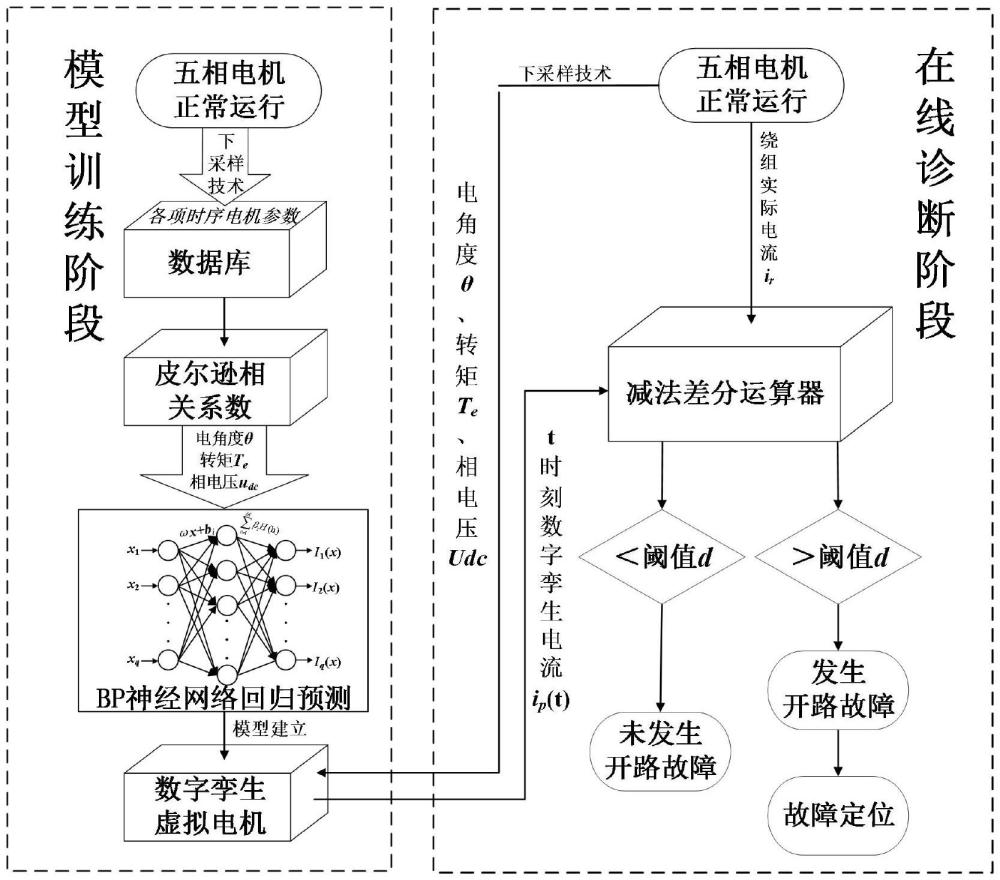
3、一種五相電機(jī)開(kāi)路故障診斷方法,其特征在于,所述診斷方法包括模型訓(xùn)練階段和在線診斷階段,其具體步驟如下:
4、步驟s1:在模型訓(xùn)練階段,通過(guò)下采樣技術(shù)采集五相電機(jī)在不同工況下正常運(yùn)行時(shí)的時(shí)序電機(jī)參數(shù),構(gòu)建訓(xùn)練數(shù)據(jù)庫(kù);
5、步驟s2:在模型訓(xùn)練階段,利用皮爾遜相關(guān)系數(shù)對(duì)采集到的五相電機(jī)參數(shù)進(jìn)行重要性排序,并根據(jù)重要性選擇同一時(shí)刻的電角度θ(t)、轉(zhuǎn)矩te(t)和相電壓udc(t)作為bp神經(jīng)網(wǎng)絡(luò)回歸模型的輸入數(shù)據(jù);
6、步驟s3:在模型訓(xùn)練階段,采用在線訓(xùn)練方式,使用訓(xùn)練數(shù)據(jù)庫(kù)中正常運(yùn)行的電角度、轉(zhuǎn)矩和相電壓數(shù)據(jù),結(jié)合對(duì)應(yīng)的繞組電流數(shù)據(jù)作為輸出,通過(guò)訓(xùn)練得到初步的bp神經(jīng)網(wǎng)絡(luò)模型;
7、步驟s4:在在線診斷階段,保存步驟s3中訓(xùn)練得到的bp神經(jīng)網(wǎng)絡(luò)模型及其參數(shù),并將其作為數(shù)字孿生虛擬電機(jī);通過(guò)下采樣技術(shù)實(shí)時(shí)采集物理電機(jī)在相同時(shí)刻的電角度、轉(zhuǎn)矩和相電壓,將這些數(shù)據(jù)輸入數(shù)字孿生虛擬電機(jī),經(jīng)過(guò)在線訓(xùn)練更新虛擬電機(jī)的繞組電流ipn,n代表五相電機(jī)a,b,c,d,e相,并實(shí)時(shí)更新數(shù)字孿生虛擬電機(jī)的參數(shù);
8、步驟s5:在在線診斷階段,將物理實(shí)體電機(jī)運(yùn)行時(shí)的繞組實(shí)際電流irn和數(shù)字孿生虛擬電機(jī)繞組電流ipn進(jìn)行對(duì)比,計(jì)算電流殘差ierror_n;
9、步驟s6:在在線診斷階段,通過(guò)對(duì)電流殘差的差分值δi進(jìn)行分析,判斷電機(jī)是否發(fā)生了繞組開(kāi)路故障或功率管開(kāi)路故障;
10、步驟s7:在在線診斷階段,記錄故障時(shí)刻后的0.5個(gè)的電流基波周期的采樣電流值i1和0.75個(gè)的電流基波周期的采樣電流值i2,對(duì)兩電流值進(jìn)行加和處理,計(jì)算得到診斷變量kn進(jìn)行故障定位。
11、進(jìn)一步的,所述步驟s1采用下采樣技術(shù)采集電機(jī)參數(shù)數(shù)據(jù)構(gòu)建數(shù)據(jù)庫(kù)時(shí),對(duì)采集得到的數(shù)據(jù)進(jìn)行預(yù)處理,刪除數(shù)據(jù)庫(kù)中的空值并采用z-score方法去除數(shù)據(jù)庫(kù)中明顯的異常值。
12、進(jìn)一步的,所述步驟s2中通過(guò)計(jì)算皮爾遜相關(guān)系數(shù)評(píng)估電機(jī)各項(xiàng)參數(shù)與繞組電流之間的相關(guān)性,具體包括以下步驟:
13、步驟s2-1、從數(shù)據(jù)庫(kù)中隨機(jī)選擇子集作為樣本集,子集中電機(jī)各項(xiàng)參數(shù)作為輸入集,對(duì)應(yīng)的繞組電流作為輸出集;
14、步驟s2-2、利用皮爾遜相關(guān)系數(shù)公式計(jì)算各電機(jī)參數(shù)與繞組電流的相關(guān)性系數(shù),公式如下:
15、
16、其中,qi為電機(jī)參數(shù)樣本,pi為繞組電流樣本,和分別為對(duì)應(yīng)樣本的平均值,rq,p的取值范圍為[-1,1];
17、步驟s2-3、通過(guò)相關(guān)性系數(shù)的絕對(duì)值判斷各電機(jī)參數(shù)對(duì)繞組電流的影響程度,相關(guān)性越高,表明該參數(shù)對(duì)繞組電流的影響越顯著;
18、步驟s2-4、根據(jù)計(jì)算得到的相關(guān)性系數(shù)排序,篩選出對(duì)繞組電流影響顯著的關(guān)鍵電機(jī)參數(shù)。
19、進(jìn)一步的,所述步驟s2中的bp神經(jīng)網(wǎng)絡(luò)模型為多隱藏層結(jié)構(gòu)的神經(jīng)網(wǎng)絡(luò),三層分別為輸入層、隱藏層和輸出層,其中輸入層的輸入端口為3個(gè),a為數(shù)據(jù)庫(kù)中每項(xiàng)電機(jī)參數(shù)的數(shù)據(jù)個(gè)數(shù),輸入層端口分別為電角度θ(t)、轉(zhuǎn)矩te(t)和相電壓udc(t);輸出層的輸出端口為1個(gè),輸出為數(shù)字孿生虛擬電機(jī)繞組電流ipn;其隱藏層的神經(jīng)元數(shù)為m個(gè),隱藏層的層數(shù)為n個(gè),n和m的具體數(shù)值根據(jù)實(shí)際工況進(jìn)行調(diào)整。
20、進(jìn)一步的,所述步驟s3中采用在線訓(xùn)練的方式訓(xùn)練bp神經(jīng)網(wǎng)絡(luò)模型,t時(shí)刻輸入的特征量xn為:
21、xn=[θ(t),te(t),udc(t)]
22、其中xn為數(shù)據(jù)庫(kù)中電角度θ、轉(zhuǎn)矩te、相電壓udc和前一時(shí)刻電機(jī)繞組電流的數(shù)據(jù)集;θ(t)表示數(shù)據(jù)庫(kù)中t時(shí)刻電機(jī)的電角度;te(t)表示t時(shí)刻電機(jī)的電角度,udc(t)表示t時(shí)刻電機(jī)的相電壓;特征量按時(shí)間順序依次輸入到bp神經(jīng)網(wǎng)絡(luò)模型中進(jìn)行模型訓(xùn)練。
23、進(jìn)一步的,所述步驟s4中將訓(xùn)練好的bp神經(jīng)網(wǎng)絡(luò)模型作為數(shù)字孿生虛擬電機(jī),并采用下采樣技術(shù)實(shí)時(shí)采集物理實(shí)體電機(jī)運(yùn)行時(shí)同一時(shí)刻的電角度、轉(zhuǎn)矩和相電壓數(shù)據(jù),采集到的實(shí)時(shí)數(shù)據(jù)通過(guò)流式數(shù)據(jù)的形式輸入進(jìn)數(shù)字孿生虛擬電機(jī)模型中得到數(shù)字孿生虛擬電機(jī)繞組電流ipn,并通過(guò)滑動(dòng)窗口方法處理歷史數(shù)據(jù),模型在每個(gè)時(shí)間步驟只保留最近一個(gè)基波周期的數(shù)據(jù)點(diǎn)作為在線訓(xùn)練的實(shí)時(shí)的訓(xùn)練集。
24、進(jìn)一步的,所述步驟s5中在t時(shí)刻的電機(jī)繞組電流的電流殘差ierror_n為:
25、ierror_n(t)=irn(t)-ipn(t)
26、其中irn(t)為t時(shí)刻物理實(shí)體電機(jī)繞組實(shí)際電流,ipn(t)為t時(shí)刻數(shù)字孿生虛擬電機(jī)繞組電流,所述步驟s6中電機(jī)繞組的電流殘差的差分值δi為:
27、
28、其中tn為tn-1后一時(shí)刻;
29、對(duì)在線診斷的判斷依據(jù)為:
30、
31、其中d1為設(shè)定的在線診斷閾值。
32、進(jìn)一步的,所述步驟s7中診斷變量kn的公式為:
33、kn=i1+i2
34、其中i1為故障后0.5個(gè)的電流基波周期的采樣電流值,i2為故障后0.75個(gè)的電流基波周期的采樣電流值;
35、對(duì)故障定位的判斷依據(jù)為:
36、
37、進(jìn)一步的,所述五相永磁同步電機(jī)驅(qū)動(dòng)系統(tǒng)由五相永磁容錯(cuò)電機(jī)和一套五相半橋逆變器構(gòu)成,功率開(kāi)關(guān)管t1、t2、t3、t4、t5、t6、t7、t8、t9、t10構(gòu)成了五相半橋逆變器的上下橋臂,逆變器母線端為udc直流供電,所述五相永磁容錯(cuò)電機(jī)采用10槽8極分?jǐn)?shù)槽雙層集中繞組結(jié)構(gòu),兩相槽間隔電角度為144°,繞組無(wú)重疊,轉(zhuǎn)子采用表貼式永磁體結(jié)構(gòu),離心高度為5mm。
38、本發(fā)明采用以上技術(shù)方案與現(xiàn)有技術(shù)相比,具有以下有益效果:
39、(1)本發(fā)明提供的一種五相電機(jī)開(kāi)路故障診斷方法,無(wú)需采集電機(jī)各種故障的數(shù)據(jù),只需要電機(jī)正常運(yùn)行數(shù)據(jù)即可對(duì)故障進(jìn)行診斷,極大降低了診斷數(shù)據(jù)采集的難度。
40、(2)本發(fā)明提供的一種五相電機(jī)開(kāi)路故障診斷方法,無(wú)需提前了解電機(jī)精確的參數(shù)即可得到準(zhǔn)確的電機(jī)繞組電流。
41、(3)本發(fā)明提供的一種五相電機(jī)開(kāi)路故障診斷方法,所提出的下采樣技術(shù),能夠非常精確的采集同一時(shí)刻下電機(jī)的不同參數(shù)數(shù)據(jù),保證了各參數(shù)數(shù)據(jù)的時(shí)間一致性,保證了訓(xùn)練數(shù)據(jù)的有效性。
42、(4)本發(fā)明提供的一種五相電機(jī)開(kāi)路故障診斷方法,bp神經(jīng)網(wǎng)絡(luò)模型是使用實(shí)際運(yùn)行時(shí)的健康數(shù)據(jù)進(jìn)行訓(xùn)練的,因此它可以比基于觀察者的數(shù)學(xué)模型更準(zhǔn)確地復(fù)制目標(biāo)運(yùn)動(dòng)的狀態(tài)。
43、(5)本發(fā)明提供的一種五相電機(jī)開(kāi)路故障診斷方法,采用隨機(jī)森林模型提取訓(xùn)練所需要特征量,無(wú)需將所有的特征參數(shù)作為輸入,減少了模型訓(xùn)練時(shí)間并且保證了模型的準(zhǔn)確性。
44、(6)本發(fā)明提供的一種五相電機(jī)開(kāi)路故障診斷方法,其診斷速度極快,診斷算法簡(jiǎn)單,優(yōu)于一般的在線診斷方法,并且不需要制定復(fù)雜的閾值。
45、(7)本發(fā)明供的一種五相電機(jī)開(kāi)路故障診斷方法,采用電流殘差的差分值作為判斷是否發(fā)生故障的標(biāo)準(zhǔn),具有很強(qiáng)的魯棒性,能夠很好的防止誤診斷。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!