偏航確定方法、裝置、計算機設備及存儲介質與流程
本發明涉及導航,尤其涉及一種偏航確定方法、裝置及存儲介質方法、裝置、計算機設備及存儲介質。
背景技術:
1、隨著移動互聯網技術和導航技術的發展,人們日常出行越來越依賴于地圖導航的應用,人們對導航的準確度和靈敏度的要求也越來越高。其中,在導航引擎應用中,偏航判定的體驗是至關重要的。用戶期望偏航判定又準確又靈敏,若偏航判定錯誤,則會導致錯誤的給出新的路徑和播報,造成不必要的繞路和安全隱患,若偏航判定太遲緩,則會導致誘導信息延遲或丟失,和真實道路信息有誤差,均會造成不好的體驗。
技術實現思路
1、基于此,有必要針對上述技術問題,提供一種偏航確定方法、裝置、計算機設備及存儲介質,以解決上述現有技術中存在的至少一個問題。
2、第一方面,本申請實施例提供了一種偏航確定方法,包括:
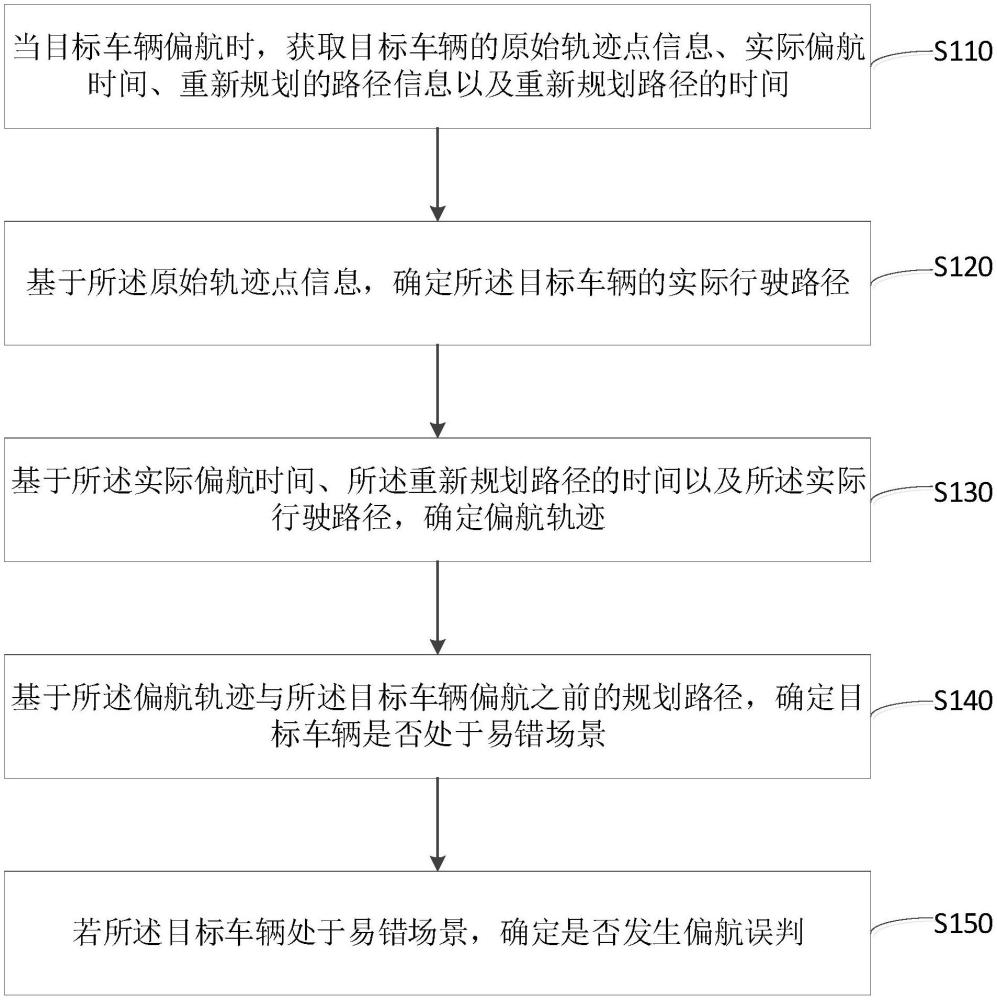
3、當目標車輛偏航時,獲取目標車輛的原始軌跡點信息、實際偏航時間、重新規劃的路徑信息以及重新規劃路徑的時間;
4、基于所述原始軌跡點信息,確定所述目標車輛的實際行駛路徑;
5、基于所述實際偏航時間、所述重新規劃路徑的時間以及所述實際行駛路徑,確定偏航軌跡;
6、基于所述偏航軌跡與所述目標車輛偏航之前的規劃路徑,確定目標車輛是否處于易錯場景;
7、若所述目標車輛處于非易錯場景,確定是否發生偏航誤判。
8、在一實施例中,所述基于所述偏航軌跡與所述目標車輛偏航之前的規劃路徑,確定目標車輛是否處于易錯場景,包括:
9、確定所述偏航軌跡對應的第一軌跡曲線以及偏航路徑;
10、基于所述偏航路徑,確定第二軌跡曲線;
11、基于所述第一軌跡曲線以及第二軌跡曲線的圖幅大小,在所述目標車輛偏航之前的規劃路徑中截取對應的第三軌跡曲線;
12、將所述第一軌跡曲線、第二軌跡曲線以及第三軌跡曲線兩兩進行對比;
13、基于對比結果,確定所述目標車輛是否處于易錯場景。
14、在一實施例中,所述基于對比結果,確定所述目標車輛是否處于易錯場景,包括:
15、若第二軌跡曲線與第三軌跡曲線不重合,所述第一軌跡曲線、第二軌跡曲線以及第三軌跡曲線任意兩者之間的相似度大于預設相似度閾值,且所述第一軌跡曲線與所述第二軌跡曲線之間的相似度大于所述第一軌跡曲線與所述第三軌跡曲線之間的相似度,則確定所述目標車輛處于易錯場景。
16、在一實施例中,所述若所述目標車輛處于易錯場景,確定是否發生偏航誤判,包括:
17、若所述目標車輛處于易錯場景,確定所述實際行駛路徑中不同道路之間的綜合概率;
18、基于所述綜合概率與預設懲罰權重之間的乘積,從候選路徑中確定除所述實際行駛路徑之外的最優匹配路徑;
19、將所述最優匹配路徑與所述目標車輛偏航之前的規劃路徑進行對比;
20、基于對比結果,則確定是否發生偏航誤判。
21、在一實施例中,所述確定目標車輛是否處于易錯場景之后,還包括:
22、若所述目標車輛處于非易錯場景,確定是否發生偏航誤判。
23、在一實施例中,所述確定是否發生偏航誤判,包括:
24、確定所述偏航軌跡對應的偏航路徑;
25、將所述偏航路徑與所述目標車輛偏航之前的規劃路徑進行對比;
26、基于對比結果,確定是否發生偏航誤判。
27、在一實施例中,所述基于所述實際偏航時間、所述重新規劃路徑的時間以及所述實際行駛路徑,確定偏航軌跡,包括:
28、基于所述實際偏航時間,確定目標偏航軌跡點;
29、基于所述目標偏航軌跡點在所述實際行駛路徑中確定開始軌跡點以及結束軌跡點;
30、基于所述開始軌跡點以及結束軌跡點,得到所述偏航軌跡。
31、在一實施例中,所述確定是否發生偏航誤判之后,還包括:
32、當未發生偏航誤判時,確定導航引擎的誤偏航率;
33、確定針對本次導航判定結果的偏航響應時長;
34、基于所述誤偏航率以及所述偏航響應時長,對所述導航引擎的偏航判定效果進行評估。
35、第二方面,提供了一種偏航確定裝置,包括:
36、偏航信息獲取單元,用于當目標車輛偏航時,獲取目標車輛的原始軌跡點信息、實際偏航時間、重新規劃的路徑信息以及重新規劃路徑的時間;
37、實際行駛路徑確定單元,用于基于所述原始軌跡點信息,確定所述目標車輛的實際行駛路徑;
38、偏航軌跡確定單元,用于基于所述實際偏航時間、所述重新規劃路徑的時間以及所述實際行駛路徑,確定偏航軌跡;
39、易錯場景判斷單元,用于基于所述偏航軌跡與所述目標車輛偏航之前的規劃路徑,確定目標車輛是否處于易錯場景;
40、偏航確定單元,用于若所述目標車輛處于易錯場景,確定是否發生偏航誤判。
41、第三方面,提供了一種可讀存儲介質,其上存儲有計算機可讀指令,其特征在于,所述計算機可讀指令被處理器執行時實現如上述所述偏航確定方法。
42、上述偏航確定方法、裝置、計算機設備及存儲介質,其方法實現,包括:當目標車輛偏航時,獲取目標車輛的原始軌跡點信息、實際偏航時間、重新規劃的路徑信息以及重新規劃路徑的時間;基于所述原始軌跡點信息,確定所述目標車輛的實際行駛路徑;基于所述實際偏航時間、所述重新規劃路徑的時間以及所述實際行駛路徑,確定偏航軌跡;基于所述偏航軌跡與所述目標車輛偏航之前的規劃路徑,確定目標車輛是否處于易錯場景;若所述目標車輛處于易錯場景,確定是否發生偏航誤判。本申請實施例中,當導航引擎檢測到車輛發生偏航時,可獲取車輛的軌跡點,偏航時間、重新規劃路徑以及重新規劃路徑的時間,以確定車輛的實際行駛路徑以及偏航軌跡,并基于車輛當前所處場景,確定是否發生偏航誤判問題,不僅可更準確地還原司機行駛路徑,同時可兼容原始軌跡點平漂、路網等距偏差、平行路等復雜場景,從而確定導航引擎的本次偏航判定是否有誤,以提高導航引擎針對偏航判定的準確性和完整性。
技術特征:
1.一種偏航確定方法,其特征在于,所述方法,包括:
2.如權利要求1所述的偏航確定方法,其特征在于,所述基于所述偏航軌跡與所述目標車輛偏航之前的規劃路徑,確定目標車輛是否處于易錯場景,包括:
3.如權利要求2所述的偏航確定方法,其特征在于,所述基于對比結果,確定所述目標車輛是否處于易錯場景,包括:
4.如權利要求1或2所述的偏航確定方法,其特征在于,所述確定是否發生偏航誤判,包括:
5.如權利要求1所述的偏航確定方法,其特征在于,所述確定目標車輛是否處于易錯場景之后,還包括:
6.如權利要求5所述的偏航確定方法,其特征在于,所述確定是否發生偏航誤判,包括:
7.如權利要求1所述的偏航確定方法,其特征在于,所述基于所述實際偏航時間、所述重新規劃路徑的時間以及所述實際行駛路徑,確定偏航軌跡,包括:
8.如權利要求1-7任一項所述的偏航確定方法,其特征在于,所述確定是否發生偏航誤判之后,還包括:
9.一種偏航確定裝置,其特征在于,所述裝置,包括:
10.一種可讀存儲介質,其上存儲有計算機可讀指令,其特征在于,所述計算機可讀指令被處理器執行時實現如權利要求1至8任一項所述偏航確定方法。
技術總結
本發明公開了偏航確定方法、裝置、計算機設備及存儲介質,其方法實現,包括:當目標車輛偏航時,獲取目標車輛的原始軌跡點信息、實際偏航時間、重新規劃的路徑信息以及重新規劃路徑的時間;基于原始軌跡點信息,確定目標車輛的實際行駛路徑;基于實際偏航時間、重新規劃路徑的時間以及實際行駛路徑,確定偏航軌跡;基于偏航軌跡與目標車輛偏航之前的規劃路徑,確定目標車輛是否處于易錯場景;若目標車輛處于易錯場景,確定是否發生偏航誤判。不僅可更準確地還原司機行駛路徑,同時可兼容原始軌跡點平漂、路網等距偏差、平行路等復雜場景,從而確定導航引擎的本次偏航判定是否有誤,以提高導航引擎針對偏航判定的準確性和完整性。
技術研發人員:朱蘇北,樊旭穎,李雋穎,臧蘇宇
受保護的技術使用者:深圳依時貨拉拉科技有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!