清掃車路徑規劃方法與流程
本發明涉及清掃車路徑規劃,具體為清掃車路徑規劃方法。
背景技術:
1、清掃車路徑規劃是自動駕駛和機器人技術中的一個重要領域,旨在通過算法和傳感器技術,使清掃車能夠自主規劃并執行清掃任務,這一過程通常包括環境感知、路徑生成、路徑調整與優化等多個環節,具體來說,清掃車利用攝像頭、激光雷達、紅外傳感器的多種傳感器,實時感知周圍環境,包括道路狀況、障礙物位置;隨后,基于感知到的環境信息,生成初步的清掃路徑,并在清掃過程中,根據實時感知到的環境變化對路徑進行動態調整和優化,以確保清掃任務的高效完成。
2、目前,部分現有清掃車路徑規劃的技術,在復雜多變的環境中,如擁擠的城市街道或復雜的工業園區,難以準確感知和應對所有障礙物,導致路徑規劃不夠精確,環境適應性差;且在動態變化的環境中,清掃車需要能夠快速響應環境變化并調整路徑,但部分現有技術在實時性方面存在不足,影響清掃效率;此外,部分生成的清掃路徑存在急轉彎或頻繁變向的情況,這不僅增加了清掃車的能耗和磨損,還可能影響清掃效果。
技術實現思路
1、本發明的目的在于提供清掃車路徑規劃方法,解決了上述背景技術中所提出的問題。
2、為實現上述目的,本發明提供如下技術方案,路徑規劃方法具體包括如下步驟:
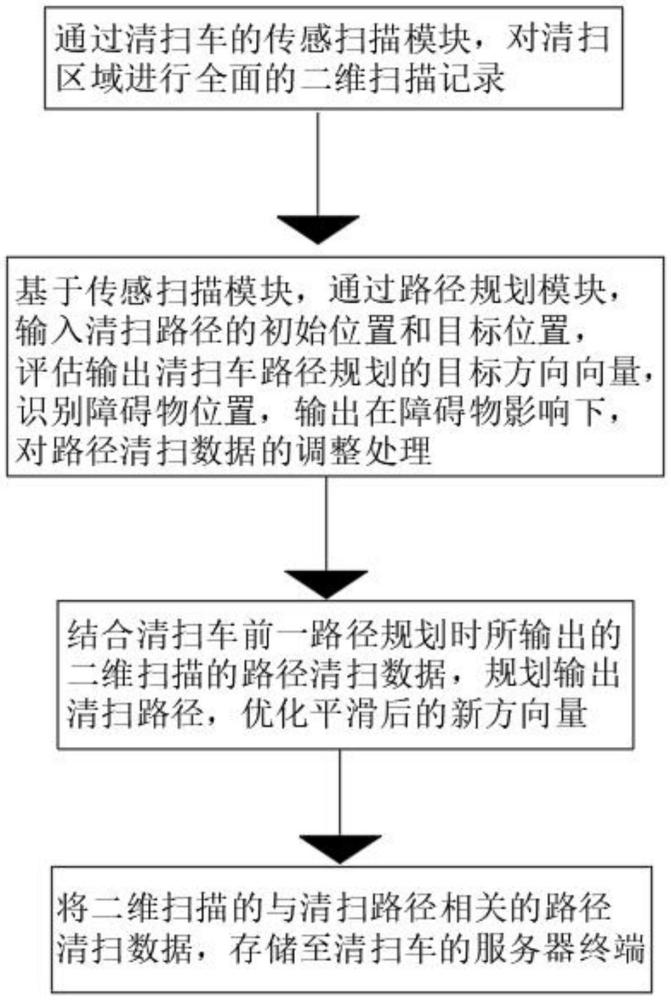
3、數據采集:通過清掃車的傳感掃描模塊,對清掃區域進行全面的二維掃描記錄;
4、數據輸入與處理:基于傳感掃描模塊,通過路徑規劃模塊,輸入清掃路徑的初始位置和目標位置,并根據初始位置清掃至目標位置的方向,評估輸出清掃車路徑規劃的目標方向向量,清掃車的傳感掃描識別清掃路徑過程中,目標方向向量內的障礙物位置,且根據障礙物位置,輸出在障礙物影響下,對路徑清掃數據的調整處理;
5、路徑優化:基于對路徑清掃數據的調整處理,并結合清掃車前一路徑規劃時所輸出的二維掃描的路徑清掃數據,規劃輸出清掃路徑,優化平滑后的新方向量;
6、數據上傳:將二維掃描的與清掃路徑相關的路徑清掃數據,存儲至清掃車的服務器終端;
7、所述傳感掃描模塊用到的設備包括有激光雷達、攝像頭、超聲波傳感器,所述路徑規劃模塊用到的設備包括有車載計算機和控制系統。
8、可選的,所述目標方向量評估單元的評估過程如下:
9、f=(fx,fy);
10、
11、其中:
12、f為方向向量指數;
13、mx為目標位置x軸指數,my目標位置y軸指數,(mx,my)為二維目標位置;
14、cx為初始位置x軸指數,cy為初始位置y軸指數,(cx,cy)為二維初始位置;
15、fx為方向量x軸變化指數,fy方向量y軸變化指數;
16、基于所述傳感掃描模塊和所述路徑規劃模塊,在清掃區域的二維掃描環境范圍內,輸入二維初始位置(cx,cy)和二維目標位置(mx,my),利用二維坐標,通過方向向量f=(fx,fy)中的兩個分量fx和fy,評估反映了從初始位置(cx,cy)到目標位置(mx,my)的單位距離變化,進而輸出方向向量指數f。
17、可選的,所述障礙影響下路徑調整單元的調整過程如下:
18、
19、其中:
20、fnew為調整后新方向量指數;
21、δ為障礙調整因子,δ反映了避開障礙物的強度調節程度;
22、zx為障礙物位置x軸指數,zy為障礙物位置y軸指數,(zx,zy)為二維障礙物位置;
23、以下為本單元算法中引用所述目標方向量評估單元中的數值指數:f為方向向量指數,cx為初始位置x軸指數,cy為初始位置y軸指數;
24、通過所述傳感掃描模塊,假設掃描存在二維障礙物位置(zx,zy),基于所述目標方向量評估單元評估輸出的f=(fx,fy),以及所述路徑規劃模塊對障礙調整因子δ的規劃調整,輸出調整后新方向量位置的二維坐標軸為fnew=(fxnew,fynew),其中,fxnew為調整后新方向量x軸指數,fynew為調整后新方向量y軸指數,即調整后新方向量指數fnew。
25、可選的,所述路徑平滑優化單元的優化過程如下:
26、
27、其中:
28、為優化后新方向量指數;
29、qx為前一時刻方向向量x軸指數,qy為前一時刻方向向量y軸指數,(qx,qy)為清掃車前一路徑規劃時的二維方向量坐標軸;
30、τ為方向變化調整因子,τ反映了對fnew和之間控制的權重分配;
31、基于fnew=(fxnew,fynew),以及清掃車已結束清掃的前一路徑規劃的二維方向向量(qx,qy),利用所述方向變化調整因子τ,優化后新方向量的二維坐標軸為即優化后新方向量指數
32、可選的,所述障礙調整因子δ在路徑規劃模塊中,用于調整清掃車在遇到障礙物時的避障行為程度,所述障礙調整因子δ遇障礙物的把控調整程度如下:
33、s1、障礙物距離清掃車越近,需避免障礙物與清掃車的碰撞,因此障礙調整因子δ調整變化的程度增大;
34、s2、障礙物體積越大,清掃車需要避開的空間就越大,因此障礙調整因子δ調整變化的程度增大;
35、s3、清掃車速度越快,避障所需的反應時間和調整幅度就越大因此,障礙調整因子δ調整變化的程度增大;
36、s4、不同清掃車的轉向能力不同,轉向能力較差的清掃車,為避免過度轉向,因此將調整因子δ調整變化的程度減小。
37、可選的,所述方向變化調整因子τ用于平衡清掃車路徑清掃方向的變化,所述方向變化調整因子τ調整變化的誘因包括有清掃車的尺寸、質量、轉向能力,障礙物的分布、道路的寬窄、曲率,清掃車清掃的精度、速度、能耗;
38、在狹窄的清掃空間中,清掃車若需更靈活地避開障礙物,需要設置較小的方向變化調整因子τ值;而在開闊的區域中,若需保持清掃車的穩定性和直線行駛能力,則設置較大的方向變化調整因子τ值。
39、可選的,所述路徑平滑優化單元輸出的所述優化后新方向量指數即能夠迭代清掃車下一次路徑規劃中所述目標方向量評估單元中的(mx,my),并作為輸入數據,進行不斷優化清掃車的路徑規劃。
40、可選的,所述障礙影響下路徑調整單元中的障礙調整因子δ,能夠根據所述路徑平滑優化單元輸出的方向變化調整因子τ調整變化的誘因,來動態調整,形成閉環優化。
41、與現有技術相比,本發明的有益效果如下:
42、一、本發明通過精確的環境感知和實時的路徑調整,清掃車能夠更高效地完成清掃任務,減少因路徑規劃不當導致的重復清掃和無效移動的現象,提高清掃車的清掃效率。
43、二、本發明利用平滑的清掃路徑,減少了清掃車的急轉彎和頻繁變向,從而降低了能耗和機械磨損,延長了清掃車的使用壽命。
44、三、本發明采用更加智能和高效的清掃車路徑規劃方法,能夠為用戶帶來更好的使用體驗,提高用戶滿意度和使用體驗感。
- 還沒有人留言評論。精彩留言會獲得點贊!