移動式雷電三維定位系統及方法
本發明涉及氣象學、大氣電學和空間科學,特別涉及一種雷電三維定位系統和方法。
背景技術:
1、雷電是大氣電磁活動中的自然現象之一,雷電災害嚴重威脅著人類生命及財產安全,由于雷電發生的時間和空間具有很大的隨機性,雷擊危害巨大、成災迅速,給其研究、預報和防治帶來很多困難。雷電定位對探測雷暴云內電荷結構、電荷密度分布、及其隨雷暴過程發展的演變研究,對揭示雷電發生、發展過程物理機制有著重要的科學意義。現有技術的雷電定位方法很多,如:到達時間差法(tdoa)是目前常用雷電定位技術之一,一般都是采用4個或5個測站的到達時間差,利用冗余信息數據融合可以提高定位精度,求解一個雷電的三維定位估計,再進行優化擬合。
2、現有技術的雷電定位方法,將多個測站布置在相距幾公里甚至更大間距的地面處,組成雷電探測網,雖然各個測站的地面存在一定的高差,但相對于各測站的間距而言高差很小,雷電探測網的測站布局可以視為一個平面,距離測站較遠的雷電輻射源入射角較小,雷電定位結果中高度誤差相對較大。設置在地面的探測站,接收雷電信號的同時,電波在復雜地形上的傳播誤差、地面的電氣設備產生的電磁噪聲等,都會影響雷電定位精度。將某個或幾個測站設在高層建筑和高山上,可以適當解決上述問題,但高層建筑和高山有可能遮擋雷電輻射源,影響雷電探測。所以開展雷電探測定位研究,雷電探測網一般選擇在相對空曠的地區,也有建造臨時鐵塔,將個別測站的天線設置在塔上,但塔的高度是有限的,一般塔高30~50m,再高建設成本和難度大大增加,這一方法效果并不明顯。現有技術的雷電探測網是固定的,只能被動等待合適的雷電,無法適應多變的雷暴天氣。因此,開展一種新的移動三維雷電定位網,解決現有技術存在的缺陷十分必要。
技術實現思路
1、本發明的目的是提供一種移動式雷電三維定位系統,定位系統由一個車載地面主站、若干個機載空中子站、若干個機動空中子站組成。車載地面主站、機載空中子站、機動空中子站安裝有雷電信號采集裝置,車載地面主站采用汽車作為地面移動運載工具,機載空中子站和機動空中子站采用旋翼無人機作為空中移動運載工具。機載空中子站高度錯落布設,與車載地面主站形成地面層、低空層、中空層的天地一體的立體移動雷電探測網。機載空中子站配置有無線信號發射裝置,雷電信號經過處理調制后發射,車載地面主站配置有無線信號接收裝置,雷電信號通過無線方式回傳至車載地面主站,車載地面主站運用雷電定位算法解算雷電輻射源的三維位置。
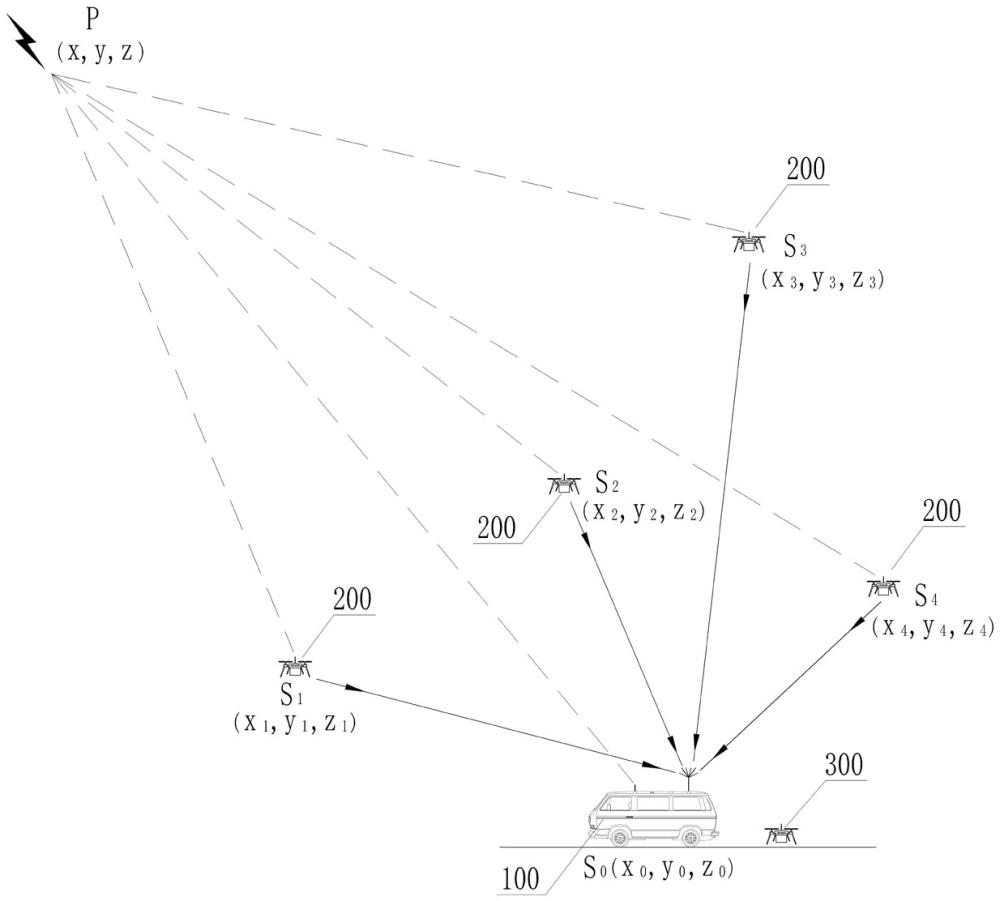
2、本發明所采取的技術方案是:提供一種移動式雷電三維定位系統,由一個車載地面主站100、若干個機載空中子站200、若干個機動空中子站300組成。所述的車載地面主站100、機載空中子站200、機動空中子站300安裝有雷電信號采集裝置400。所述的車載地面主站100采用汽車作為地面移動運載工具,所述的機載空中子站200和機動空中子站300采用旋翼無人機作為空中移動運載工具。
3、所述的車載地面主站100配置有gnss全球衛星導航接收裝置101,所述的機載空中子站200和機動空中子站300通過無人機內置的gnss全球衛星導航系統獲取gnss全球衛星導航信號,gnss全球衛星導航信號用于雷電信號授時同步,和通過實時動態載波相位差分(rtk)獲取車載地面主站100和機載空中子站200精準三維坐標,能夠在雷電發生的瞬間對采集的雷電信號標記時間戳和記錄測站的坐標。
4、所述的雷電信號采集裝置400采用fpga雷電信號高速數據采集系統,主要由fpga邏輯門電路和嵌入式arm處理器構成。
5、所述的機載空中子站200至少為4個但不限定4個,獲取定位數據和冗余數據去除模糊解。機載空中子站200高度錯落布設,與車載地面主站100形成地面層、低空層、中空層的天地一體的立體移動雷電探測網,能夠根據雷電發生的位置,通過改變移動車載地面主站100和機載空中子站200布設形式,調整雷電探測網與雷電之間的空間形態,形成與雷電發生位置最佳空間三角幾何位置關系,有利于提高雷電定位精度。
6、所述的機動空中子站300與機載空中子站200配置相同,至少1個但不限定1個,用于替換工作中的機載空中子站200,實現機載空中子站200的連續工作,被替換的機載空中子站200更換電池后作為新的機動空中子站300。
7、所述的機載空中子站200配置有無線信號發射裝置201,雷電信號采集裝置400采集的雷電信號經過處理后調制,每個機載空中子站200以不同的頻率發射,車載地面主站100配置有無線信號接收裝置102,機載空中子站200采集的雷電信號通過無線方式回傳至車載地面主站100,無線信號接收裝置102接收的信號經過fsk解調模塊103對不同的頻率的信號解調,儲存在車載地面主站100的數據存儲器104。
8、所述的車載地面主站100配置有數據處理計算單元105,通過車載地面主站100采集的雷電信號以及機載空中子站200回傳的雷電信號,數據處理計算單元105運用雷電定位算法解算雷輻射源的三維位置。
9、所述的雷電信號采集裝置400采用fpga的雷電信號高速數據采集系統,主要由fpga邏輯門電路和嵌入式arm處理器構成,fpga邏輯門電路實現模數轉換控制、雷電數據獲取、時間戳獲取、預觸發與觸發控制、波峰獲取、輸出控制,fpga邏輯門電路對采集信號濾波、過采樣、希爾伯特變換計算信號幅值、觸發判斷峰值提取功能,并將處理后的數據采用dma暫存在ddr數據存儲單元,經arm處理數據,從ddr數據存儲單元緩存中提取相應的數據本地存儲,機載空中子站200將經過調制后通過無線方式向車載地面主站100回傳數據。
10、所述的車載地面主站100配置有無人機集群控制系統106,能夠按照設定的位置自動控制布設機載空中子站200,能夠根據設定的無人機剩余電量自動控制機動空中子站300替換機載空中子站200。
11、所述的雷電信號采集裝置400,包括高速a/d轉換模塊1、gnss信號處理單元2、數據處理單元3、ddr數據存儲單元4、arm處理單元5。高速a/d轉換模塊1將雷電探測傳感器輸出的模擬信號轉變為數字信號;gnss信號處理單元2輸出高精度的時鐘頻率作為高速a/d轉換模塊1的采樣參考時鐘,保證信號轉換時間的精確性,輸出的高精度整秒時鐘信號1pps和帶有時間信息的nmea0183數據配合采樣參考時鐘,為采集的雷電信號標記時間戳;gnss信號處理單元2輸出的rtk坐標,坐標獲取模塊為坐標標記時間戳,輸出標記時間戳的坐標;fpga邏輯門電路通過編程構成數據處理單元3,實現模數轉換控制、雷電探測數據獲取、時間戳獲取、坐標標定、預觸發與觸發控制、波峰獲取、輸出控制,fpga邏輯門電路對標記時間戳的信號濾波、過采樣、希爾伯特變換計算信號幅值、觸發判斷峰值提取,雷電信號與標記時間戳的坐標合并輸出,將處理后的數據采用dma暫存ddr數據存儲單元4,并通知arm處理單元5處理數據。arm處理單元5嵌入式操作系統,在接收到采集數據的通知后,提取峰值數據及對應的時間信息及坐標,車載地面主站100的雷電信號采集裝置400將提取相應的數據存儲至數據儲存器104,機載空中子站200的雷電信號采集裝置400將提取相應的數據存儲至文件存儲單元202,并通過無線信號發射裝置201無線方式發送至車載地面主站100。
12、本發明提供一種移動式雷電三維定位方法,包括如下步驟:
13、s1、在雷電定位區域布設雷電探測網,通過車載地面主站100的無人機集群控制系統106,按照設定的平面位置和高程,控制機載空中子站200的無人機就位;
14、s2、車載地面主站100和機載空中子站200采集雷電信號;
15、s3、設定機載空中子站200的無人機低電量返航電量閾值,當任意一個機載空中子站200的無人機電源電量低于返航電量閾值時,開始機動空中子站300替換機載空中子站200;
16、s4、車載地面主站100的數據處理計算單元105通過雷電信號到達各個測站的時間差(tdoa),空間解析得到若干個雷電發生到達位置,利用加權最小二乘法得到初始解,再利用得到的初始解和約束變量進行第二次加權最小二乘法估計,最后得到改進的位置估計。
17、所述的步驟s1,車載地面主站100與機載空中子站200的布設避開山體和高層建筑,機載空中子站200的間距5~10km,低空層高度為300~1000m,中空層高度為1000~2000m,一個連續雷電事件發生過程,車載地面主站100與機載空中子站200的位置固定,車載地面主站100能夠根據雷電發生的方向,移動車載地面主站100和控制機載空中子站200改變空間布局,形成與雷電發生位置最佳空間三角幾何位置關系,提高雷電定位解算精度。
18、所述的步驟s3,返航電量閾值設定為電源滿電量的40%~50%,無人機集群控制系統106控制機動空中子站300飛抵低于返航閾值的無人機空域,替換該機載空中子站200,被替換的機載空中子站200更換電池作為新的機動空中子站300,替換電壓最低的機載空中子站200,逐步替換所有的機載空中子站200,完成一輪替換后,機動空中子站300等待下一個無人機電源電量低于返航電量閾值時,執行機載空中子站200替換。
19、所述的步驟s4,所述的到達時間差(tdoa)定位,根據已知主站s0的空間位置( x0 ? , y0 ? ,z0)和子站s i的空間位置( x i? ,y i? ,z i),以雷電輻射源p的位置的空間坐標( x,?y,?z)為變量,雷電輻射源輻射的電磁波到達各子站s i與到主站s0的時間差為δ τ i,建立方程組方程組求解:
20、,
21、其中:δ τ i=( τ 0?-? τ i),c為電磁波傳播速度, τ 0為雷電輻射源輻射的電磁波到達主站的時間, τ i為雷電輻射源輻射的電磁波到達子站的時間, i=1,2,3…… n, n為子站數。方程組求出的初始解,利用得到的初始解和約束變量進行加權最小二乘法估計,最后得到雷電位置。
22、本發明有益效果是:能夠根據天氣預測及雷暴云電場探測,采用地面車輛將探測儀器運送至雷電即將發生的地域,車載地面主站的無人機集群控制系統,按照設定的平面位置和高程,控制機載空中子站的無人機就位,系統機動性強。能夠改變移動車載地面主站和機載空中子站布設形式,調整雷電探測網與雷電之間的空間形態,有利于雷電位置解算。系統采用rtk實時動態載波相位差確定測站位置,測站位置精度可達到厘米級,大大提高雷電定位精準。采用機動空中子站輪換替換機載空中子站,實現機載空中子站的連續工作。
- 還沒有人留言評論。精彩留言會獲得點贊!