道路車輛的載荷標定方法、裝置、電子設備及存儲介質與流程
本發明涉及載荷標定,尤其是涉及一種道路車輛的載荷標定方法、裝置、電子設備及存儲介質。
背景技術:
1、隨著交通運輸行業的快速發展,道路車輛超限超載問題日益嚴重,這不僅對道路基礎設施造成巨大破壞,還嚴重威脅道路交通安全。目前,市場上已存在一些具有車輛超限超載預警的系統,但這些系統大多存在標定復雜、精度不高、兼容性差等問題。
2、由于生產工藝原因,相同車型的不同車輛在同樣載荷下的車身對車軸位移量不同。這使得在樣車上訓練完成的車載動態稱重系統,在相同車型的批產車輛上使用會存在一定的稱重誤差。當前的標定技術過于依賴車輛下線標定程序,極大影響了車輛生產效率,并且隨著車型拓展還需進行適配,使用便利性極差,并且成本費用較高。
技術實現思路
1、有鑒于此,本發明的目的在于提供一種道路車輛的載荷標定方法、裝置、電子設備及存儲介質,使得相同車型的不同車輛的載荷值更接近實際載荷值,提高載荷確定的便利性,降低了成本。
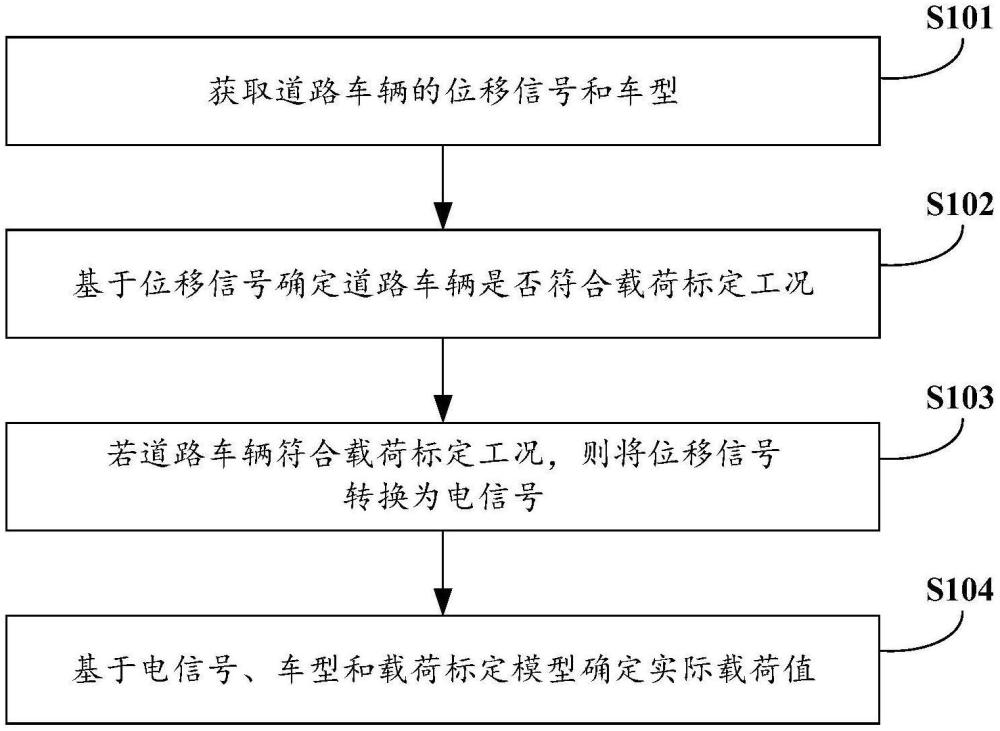
2、第一方面,本發明實施例提供了一種道路車輛的載荷標定方法,包括:獲取道路車輛的位移信號和車型;基于位移信號確定道路車輛是否符合載荷標定工況;若道路車輛符合載荷標定工況,則將位移信號轉換為電信號;基于電信號、車型和載荷標定模型確定實際載荷值;載荷標定模型包括:標定模型和誤差修正模型。
3、在本發明較佳的實施例中,上述基于位移信號確定道路車輛是否符合載荷標定工況,包括:基于位移信號確定道路車輛的行駛狀態;若行駛狀態為車輛靜止狀態,則符合載荷標定工況。
4、在本發明較佳的實施例中,上述基于電信號、車型和載荷標定模型確定實際載荷值,包括:基于車型和電信號通過標定模型對道路車輛的載荷值進行標定得到初始載荷值;通過誤差修正模型對初始載荷值進行誤差修正得到實際載荷值。
5、在本發明較佳的實施例中,上述誤差修正模型用于對相同車型的不同車輛的初始載荷值進行誤差修正;誤差修正模型的建立步驟為:對相同車型的不同車輛的稱重誤差進行分類得到誤差種類;誤差種類包括:載荷位移誤差和零點誤差;確定載荷位移誤差的數學模型為第一模型,確定零點誤差的數學模型為第二模型;建立車輛的前后軸位移量實際值與前后軸位移量理論值之間的關系;基于第一模型、第二模型、關系和預先確定的誤差參數得到誤差修正模型。
6、在本發明較佳的實施例中,上述誤差參數的確定方式為:確定進行標定的車輛的靜態載荷量與車身對車軸的第一函數以及待標定車輛的靜態載荷量與車身對車軸的第二函數;基于第一函數、第二函數和預先測量的參數關系確定誤差參數。
7、在本發明較佳的實施例中,所述第一模型為:其中,xa1和xb1分別為存在載荷位移誤差的前軸位移量和后軸位移量;和分別為前后軸的理論位移量;k1為前軸位移量的誤差補償;k2為后軸位移的誤差補償;所述第二模型為:其中,和分別為存在載荷位移誤差和零點誤差的前后軸位移量;x0a為前軸傳感器的零偏;x0b為后軸傳感器的零偏;所述關系為:xm=kxe+x0;其中,xm為關系;k為誤差系數矩陣:xe中e為一種標記符號,用于區分不同含義的變量;x0為前后軸傳感器的零偏,x0=(x0a?x0b)t,t為矩陣的轉置;所述第一函數為:其中,和分別為前后軸的理論位移量,系數a和系數b均為與變量相乘的系數,系數c為常數項,對于函數g的值有一個固定的偏移作用;所述第二函數為:其中,和分別為存在載荷位移誤差和零點誤差的前后軸位移量;系數d和系數e均為與變量相乘的系數,系數f為常數項,是對于函數g的值有一個固定的偏移作用;所述參數關系為:當g=60時,其中,和分別為前后軸傳感器的理論位移量;和分別為存在載荷位移誤差和零點誤差的前后軸傳感器位移量;為前軸傳感器零偏的理論位移量,為后軸傳感器零偏的理論位移量,為存在載荷位移誤差和零點誤差的前軸傳感器零偏位移量,為存在載荷位移誤差和零點誤差的后軸傳感器零偏位移量;所述誤差參數為:其中,k1為前軸位移量的誤差補償;系數a和系數d均為與變量相乘的系數;k2為后軸位移的誤差補償;系數b和系數e均為與變量相乘的系數;x0a和x0b均為前后軸傳感器的零偏;為存在載荷位移誤差和零點誤差的前軸傳感器零偏位移量;為前軸傳感器零偏的理論位移量;為存在載荷位移誤差和零點誤差的后軸傳感器零偏位移量;為后軸傳感器零偏的理論
8、xe=k-1(xm-x0)
9、位移量;所述誤差修正模型為:其中,xe中e為一種標記符號,用于區分不同含義的變量;k為誤差系數矩陣,且xm為關系;x0為前后軸傳感器的零偏;和分別為前后軸的理論位移量;系數a和系數d均為與變量相乘的系數;系數b為和系數e均為與變量相乘的系數;和分別為存在載荷位移誤差和零點誤差的前后軸傳感器位移量;為前軸傳感器零偏的理論位移量,為后軸傳感器零偏的理論位移量,為存在載荷位移誤差和零點誤差的前軸傳感器零偏位移量,為存在載荷位移誤差和零點誤差的后軸傳感器零偏位移量。
10、在本發明較佳的實施例中,在基于電信號和載荷標定模型確定實際載荷值之后,方法還包括:基于實際載荷值和預先設置的超載閾值確定道路車輛的超載情況;基于超載情況對道路車輛進行提醒和/或保護。
11、第二方面,本發明實施例還提供一種道路車輛的載荷標定裝置,包括:位移信號獲取模塊,用于獲取道路車輛的位移信號;載荷標定工況判斷模塊,用于基于位移信號確定道路車輛是否符合載荷標定工況;位移信號轉換模塊,用于若道路車輛符合載荷標定工況,則將位移信號轉換為電信號;實際載荷值確定模塊,用于基于電信號和載荷標定模型確定實際載荷值;載荷標定模型包括:標定模型和誤差修正模型。
12、第三方面,本發明實施例還提供一種電子設備,包括處理器和存儲器,存儲器存儲有能夠被處理器執行的計算機可執行指令,處理器執行計算機可執行指令以實現上述第一方面的道路車輛的載荷標定方法。
13、第四方面,本發明實施例還提供一種計算機可讀存儲介質,計算機可讀存儲介質存儲有計算機可執行指令,計算機可執行指令在被處理器調用和執行時,計算機可執行指令促使處理器實現上述第一方面的道路車輛的載荷標定方法。
14、本發明實施例帶來了以下有益效果:
15、本發明實施例提供了一種道路車輛的載荷標定方法、裝置、電子設備及存儲介質,通過獲取道路車輛的位移信號和車型,基于位移信號確定道路車輛是否符合載荷標定工況,若道路車輛符合載荷標定工況,則將位移信號轉換為電信號,基于電信號、車型和載荷標定模型確定實際載荷值。該方式使得相同車型的不同車輛的載荷值更接近實際載荷值,提高載荷確定的便利性,降低了成本。
16、本公開的其他特征和優點將在隨后的說明書中闡述,或者,部分特征和優點可以從說明書推知或毫無疑義地確定,或者通過實施本公開的上述技術即可得知。
17、為使本公開的上述目的、特征和優點能更明顯易懂,下文特舉較佳實施例,并配合所附附圖,作詳細說明如下。
技術特征:
1.一種道路車輛的載荷標定方法,其特征在于,所述方法包括:
2.根據權利要求1所述的方法,其特征在于,所述基于所述位移信號確定所述道路車輛是否符合載荷標定工況,包括:
3.根據權利要求1所述的方法,其特征在于,所述基于所述電信號、所述車型和載荷標定模型確定實際載荷值,包括:
4.根據權利要求3所述的方法,其特征在于,所述誤差修正模型用于對相同車型的不同車輛的初始載荷值進行誤差修正;
5.根據權利要求4所述的方法,其特征在于,所述誤差參數的確定方式為:
6.根據權利要求5所述的方法,其特征在于,所述第一模型為:其中,xa1和xb1分別為存在載荷位移誤差的前軸位移量和后軸位移量;分別為前后軸的理論位移量;k1為前軸位移量的誤差補償;k2為后軸位移的誤差補償;
7.根據權利要求1所述的方法,其特征在于,在所述基于所述電信號和載荷標定模型確定實際載荷值之后,所述方法還包括:
8.一種道路車輛的載荷標定裝置,其特征在于,所述裝置包括:
9.一種電子設備,其特征在于,包括處理器和存儲器,所述存儲器存儲有能夠被所述處理器執行的計算機可執行指令,所述處理器執行所述計算機可執行指令以實現權利要求1至7任一項所述的道路車輛的載荷標定方法。
10.一種計算機可讀存儲介質,其特征在于,所述計算機可讀存儲介質存儲有計算機可執行指令,所述計算機可執行指令在被處理器調用和執行時,所述計算機可執行指令促使處理器實現權利要求1至7任一項所述的道路車輛的載荷標定方法。
技術總結
本發明提供了一種道路車輛的載荷標定方法、裝置、電子設備及存儲介質,涉及載荷標定技術領域,包括:獲取道路車輛的位移信號和車型;基于位移信號確定道路車輛是否符合載荷標定工況;若道路車輛符合載荷標定工況,則將位移信號轉換為電信號;基于電信號、車型和載荷標定模型確定實際載荷值;載荷標定模型包括:標定模型和誤差修正模型。該方式使得相同車型的不同車輛的載荷值更接近實際載荷值,提高載荷確定的便利性,降低了成本。
技術研發人員:范金瑾
受保護的技術使用者:開沃汽車(淮南)有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!