一種基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤方法及系統(tǒng)
本發(fā)明屬于雷達(dá)組網(wǎng)融合定位跟蹤,尤其涉及一種基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤方法及系統(tǒng)。
背景技術(shù):
1、在現(xiàn)代作戰(zhàn)場(chǎng)景中,隨著超高聲速、超隱身目標(biāo)等高技術(shù)裝備的出現(xiàn)和性能的大幅提升,以及戰(zhàn)場(chǎng)電磁環(huán)境復(fù)雜等特點(diǎn),單部雷達(dá)信息處理系統(tǒng)無(wú)論在信息處理速度、信息處理質(zhì)量、信息獲取容量以及本身可靠性上都逐漸不適應(yīng)現(xiàn)代戰(zhàn)爭(zhēng)中對(duì)于多目標(biāo)的空情要求。此外,雷達(dá)系統(tǒng)在面對(duì)現(xiàn)今戰(zhàn)場(chǎng)上的強(qiáng)大欺騙干擾和壓制干擾其性能上會(huì)顯著降低而嚴(yán)重時(shí)或完全失效,并且在量測(cè)上以數(shù)據(jù)野值、雜波和漏檢體現(xiàn)。由于分布式雷達(dá)組網(wǎng)技術(shù)可以從本質(zhì)上提高抗干擾能力和高密度下多目標(biāo)信號(hào)的信息處理質(zhì)量,為此對(duì)于復(fù)雜電磁環(huán)境下的雷達(dá)組網(wǎng)融合定位跟蹤研究研究至關(guān)重要。
技術(shù)實(shí)現(xiàn)思路
1、為解決上述問(wèn)題,本發(fā)明提供了一種基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤方法,方法包括:
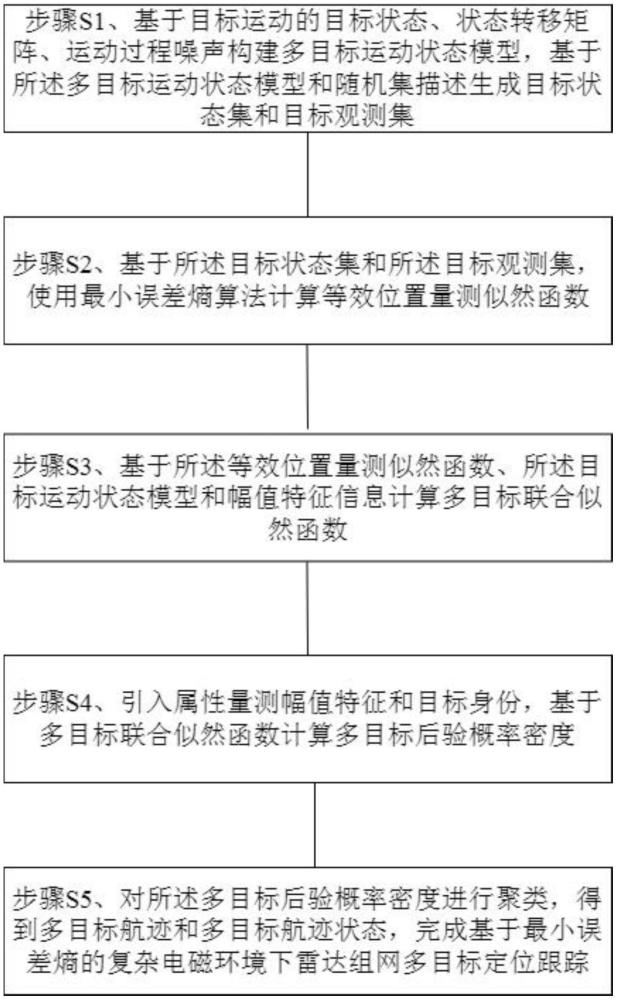
2、步驟s1、基于目標(biāo)運(yùn)動(dòng)的目標(biāo)狀態(tài)、狀態(tài)轉(zhuǎn)移矩陣、運(yùn)動(dòng)過(guò)程噪聲構(gòu)建多目標(biāo)運(yùn)動(dòng)狀態(tài)模型,基于所述多目標(biāo)運(yùn)動(dòng)狀態(tài)模型和隨機(jī)集描述生成目標(biāo)狀態(tài)集和目標(biāo)觀測(cè)集;
3、步驟s2、基于所述目標(biāo)狀態(tài)集和所述目標(biāo)觀測(cè)集,使用最小誤差熵算法計(jì)算等效位置量測(cè)似然函數(shù);
4、步驟s3、基于所述等效位置量測(cè)似然函數(shù)、所述目標(biāo)運(yùn)動(dòng)狀態(tài)模型和幅值特征信息計(jì)算多目標(biāo)聯(lián)合似然函數(shù);
5、步驟s4、引入屬性量測(cè)幅值特征和目標(biāo)身份,基于多目標(biāo)聯(lián)合似然函數(shù)計(jì)算多目標(biāo)后驗(yàn)概率密度;
6、步驟s5、對(duì)所述多目標(biāo)后驗(yàn)概率密度進(jìn)行聚類,得到多目標(biāo)航跡和多目標(biāo)航跡狀態(tài),完成基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤。
7、可選的,所述步驟s1中,基于目標(biāo)運(yùn)動(dòng)的目標(biāo)狀態(tài)、狀態(tài)轉(zhuǎn)移矩陣、運(yùn)動(dòng)過(guò)程噪聲構(gòu)建多目標(biāo)運(yùn)動(dòng)狀態(tài)模型的公式為:
8、x(k+1)=fx(k)+γw(k);
9、其中,x(k+1)為k+1時(shí)刻目標(biāo)狀態(tài),x(k)為k時(shí)刻目標(biāo)狀態(tài),f為狀態(tài)轉(zhuǎn)移矩陣,γ為增益矩陣,w(k)為過(guò)程噪聲。
10、可選的,所述步驟s1中,基于所述多目標(biāo)運(yùn)動(dòng)狀態(tài)模型和隨機(jī)集描述生成目標(biāo)狀態(tài)集和目標(biāo)觀測(cè)集具體為:
11、目標(biāo)狀態(tài)集:
12、
13、目標(biāo)觀測(cè)集:
14、
15、可選的,所述步驟s4中,多目標(biāo)后驗(yàn)概率密度具體為:
16、
17、其中,為多目標(biāo)后驗(yàn)狀態(tài)概率分布,為多目標(biāo)航跡標(biāo)簽集合,為預(yù)測(cè)的多目標(biāo)航跡標(biāo)簽空間,為量測(cè)與目標(biāo)的映射關(guān)系,為每種映射對(duì)應(yīng)的概率權(quán)重,為預(yù)測(cè)的多目標(biāo)x標(biāo)簽的合法性指示函數(shù),取值為0或1,p(θ)為映射θ條件下多目標(biāo)狀態(tài)后驗(yàn)分布。
18、可選的,所述多目標(biāo)后驗(yàn)概率密度公式中:
19、
20、
21、其中,w(i,ξ,θ)為標(biāo)簽與量測(cè)映射條件下多目標(biāo)后驗(yàn)分布對(duì)應(yīng)的概率權(quán)重,為量測(cè)z與映射θ條件下多目標(biāo)航跡標(biāo)簽的合法性指示函數(shù),取值為0或1,為映射θ條件下的多目標(biāo)狀態(tài)量測(cè)歸一化似然函數(shù),為多目標(biāo)后驗(yàn)分布,其中x,l分別為各個(gè)目標(biāo)的狀態(tài)和航跡標(biāo)簽,d是目標(biāo)身份標(biāo)簽,主要對(duì)應(yīng)了rcs與回波強(qiáng)度屬性,為目標(biāo)的似然函數(shù),為航跡標(biāo)簽為l的單目標(biāo)狀態(tài)歸一化量測(cè)似然,為目標(biāo)的檢測(cè)概率,為目標(biāo)存在量測(cè)映射時(shí)的似然函數(shù),為多目標(biāo)狀態(tài)集合,是目標(biāo)回波點(diǎn)跡強(qiáng)度似然。
22、本發(fā)明還公開(kāi)一種基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤系統(tǒng),系統(tǒng)包括:
23、模型構(gòu)建模塊,用于基于目標(biāo)運(yùn)動(dòng)的目標(biāo)狀態(tài)、狀態(tài)轉(zhuǎn)移矩陣、運(yùn)動(dòng)過(guò)程噪聲構(gòu)建多目標(biāo)運(yùn)動(dòng)狀態(tài)模型,基于所述多目標(biāo)運(yùn)動(dòng)狀態(tài)模型和隨機(jī)集描述生成目標(biāo)狀態(tài)集和目標(biāo)觀測(cè)集;
24、量測(cè)似然函數(shù)模塊,用于基于所述目標(biāo)狀態(tài)集和所述目標(biāo)觀測(cè)集,使用最小誤差熵算法計(jì)算等效位置量測(cè)似然函數(shù);
25、聯(lián)合似然模塊,用于基于所述等效位置量測(cè)似然函數(shù)、所述目標(biāo)運(yùn)動(dòng)狀態(tài)模型和幅值特征信息計(jì)算多目標(biāo)聯(lián)合似然函數(shù);
26、概率密度計(jì)算模塊,用于引入屬性量測(cè)幅值特征和目標(biāo)身份,基于多目標(biāo)聯(lián)合似然函數(shù)計(jì)算多目標(biāo)后驗(yàn)概率密度;
27、目標(biāo)定位跟蹤模塊,用于對(duì)所述多目標(biāo)后驗(yàn)概率密度進(jìn)行聚類,得到多目標(biāo)航跡和多目標(biāo)航跡狀態(tài),完成基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤。
28、可選的,模型構(gòu)建模塊中,多目標(biāo)運(yùn)動(dòng)狀態(tài)模型公式為:
29、x(k+1)=fx(k)+γw(k);
30、其中,x(k+1)為k+1時(shí)刻目標(biāo)狀態(tài),x(k)為k時(shí)刻目標(biāo)狀態(tài),f為狀態(tài)轉(zhuǎn)移矩陣,γ為增益矩陣,w(k)為過(guò)程噪聲。
31、可選的,模型構(gòu)建模塊中:
32、目標(biāo)狀態(tài)集:
33、
34、目標(biāo)觀測(cè)集:
35、
36、與現(xiàn)有技術(shù)相比,本發(fā)明的有益效果如下:
37、本發(fā)明提出一種基于誤差熵的復(fù)雜電磁環(huán)境下的雷達(dá)組網(wǎng)多目標(biāo)融合定位跟蹤方法,可用非高斯噪聲、野值、漏檢等復(fù)雜電磁環(huán)境感知場(chǎng)景。現(xiàn)有方法在野值等非高斯噪聲環(huán)境下的跟蹤精度下降影響嚴(yán)重。本專利方法采用基于誤差熵的多目標(biāo)融合跟蹤方法。基于混合高斯核函數(shù)對(duì)雷達(dá)組網(wǎng)量測(cè)中的誤差分布進(jìn)行學(xué)習(xí)與逼近,并建立混合誤差熵的優(yōu)化目標(biāo)函數(shù),從而在最小誤差熵準(zhǔn)則下得到目標(biāo)狀態(tài)的最優(yōu)估計(jì)。進(jìn)一步,利用雷達(dá)量測(cè)中的幅值信息,提升目標(biāo)量測(cè)與雜波等干擾的區(qū)分能力,提高目標(biāo)與量測(cè)的關(guān)聯(lián)正確率,并得到多目標(biāo)位置與幅值量測(cè)的聯(lián)合似然函數(shù)。然后,基于多目標(biāo)隨機(jī)有限集模型在貝葉斯估計(jì)框架下得到多目標(biāo)狀態(tài)和幅值的聯(lián)合后驗(yàn)分布。為了降低多目標(biāo)航跡估計(jì)的復(fù)雜度,本專利最后給出多目標(biāo)密度的凝聚方法,通過(guò)聚類得到每個(gè)目標(biāo)的航跡,避免多目標(biāo)狀態(tài)與量測(cè)關(guān)聯(lián)不確定所導(dǎo)致的指數(shù)化增長(zhǎng)的計(jì)算復(fù)雜度,提升雷達(dá)組網(wǎng)數(shù)據(jù)處理的實(shí)時(shí)性。
技術(shù)特征:
1.一種基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤方法,其特征在于,所述方法具體包括:
2.基于權(quán)利要求1所述的基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤方法,其特征在于,所述步驟s1中,基于目標(biāo)運(yùn)動(dòng)的目標(biāo)狀態(tài)、狀態(tài)轉(zhuǎn)移矩陣、運(yùn)動(dòng)過(guò)程噪聲構(gòu)建多目標(biāo)運(yùn)動(dòng)狀態(tài)模型的公式為:
3.基于權(quán)利要求2所述的基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤方法,其特征在于,所述步驟s1中,基于所述多目標(biāo)運(yùn)動(dòng)狀態(tài)模型和隨機(jī)集描述生成目標(biāo)狀態(tài)集和目標(biāo)觀測(cè)集具體為:
4.基于權(quán)利要求1所述的基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤方法,其特征在于,所述步驟s4中,多目標(biāo)后驗(yàn)概率密度具體為:
5.基于權(quán)利要求4所述的基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤方法,其特征在于,所述多目標(biāo)后驗(yàn)概率密度公式中,
6.一種基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤系統(tǒng),所述系統(tǒng)用于實(shí)現(xiàn)權(quán)利要求1-5任一項(xiàng)所述的雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤啊,其特征在于,系統(tǒng)包括:
7.基于權(quán)利要求6所述的基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤系統(tǒng),其特征在于,模型構(gòu)建模塊中,多目標(biāo)運(yùn)動(dòng)狀態(tài)模型公式為:
8.基于權(quán)利要求7所述的基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤系統(tǒng),其特征在于,模型構(gòu)建模塊中:
技術(shù)總結(jié)
本發(fā)明屬于雷達(dá)組網(wǎng)融合定位跟蹤技術(shù)領(lǐng)域,公開(kāi)了一種基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤方法及系統(tǒng),包括:基于目標(biāo)運(yùn)動(dòng)的目標(biāo)狀態(tài)、狀態(tài)轉(zhuǎn)移矩陣、運(yùn)動(dòng)過(guò)程噪聲構(gòu)建多目標(biāo)運(yùn)動(dòng)狀態(tài)模型,基于多目標(biāo)運(yùn)動(dòng)狀態(tài)模型和隨機(jī)集描述生成目標(biāo)狀態(tài)集和目標(biāo)觀測(cè)集;基于目標(biāo)狀態(tài)集和目標(biāo)觀測(cè)集,使用最小誤差熵算法計(jì)算等效位置量測(cè)似然函數(shù);基于等效位置量測(cè)似然函數(shù)、目標(biāo)運(yùn)動(dòng)狀態(tài)模型和幅值特征信息計(jì)算多目標(biāo)聯(lián)合似然函數(shù);基于多目標(biāo)聯(lián)合似然函數(shù)計(jì)算多目標(biāo)后驗(yàn)概率密度;對(duì)多目標(biāo)后驗(yàn)概率密度進(jìn)行聚類,得到多目標(biāo)航跡和多目標(biāo)航跡狀態(tài),完成基于最小誤差熵的復(fù)雜電磁環(huán)境下雷達(dá)組網(wǎng)多目標(biāo)定位跟蹤。
技術(shù)研發(fā)人員:張雪,李旻哲,魯濤
受保護(hù)的技術(shù)使用者:上海交通大學(xué)
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!