機器人的路徑規劃方法、設備及存儲介質與流程
本申請涉及數據處理,尤其涉及一種機器人的路徑規劃方法、設備及存儲介質。
背景技術:
1、在自動駕駛以及機器人導航等領域中,可以根據激光雷達、攝像頭、慣性測量單元等傳感器獲取導航需要的信息。激光雷達可以獲取高精度的三維環境信息,攝像頭可以捕捉豐富的圖像信息,慣性測量單元可以提供車輛的姿態和運動信息。
2、為了解決單一的傳感器數據可能無法提供足夠的精度和可靠性的問題,通常融合多個傳感器的數據來提高導航的準確性和可靠性。例如,通過特征匹配技術,將激光雷達數據中的特征與攝像頭圖像中的特征相對應,實現兩種數據的融合。融合后的數據用于構建環境模型,識別出環境中的靜態和動態障礙物,以及導航要素。然而,在導航路徑上環境是動態變化的,在簡單環境中采用復雜的傳感器數據進行融合,會產生不必要的資源消耗。在復雜環境中,使用簡單的傳感器數據進行融合,可能會因為信息不足而導致導航失敗或發生危險。
3、上述內容僅用于輔助理解本申請的技術方案,并不代表承認上述內容是現有技術。
技術實現思路
1、本申請的主要目的在于提供一種機器人的路徑規劃方法、設備及存儲介質,旨在解決不同環境條件下導航資源利用不合理,導航準確性與效率難以兼顧的問題的技術問題。
2、為實現上述目的,本申請提出一種機器人的路徑規劃方法,所述的方法包括:
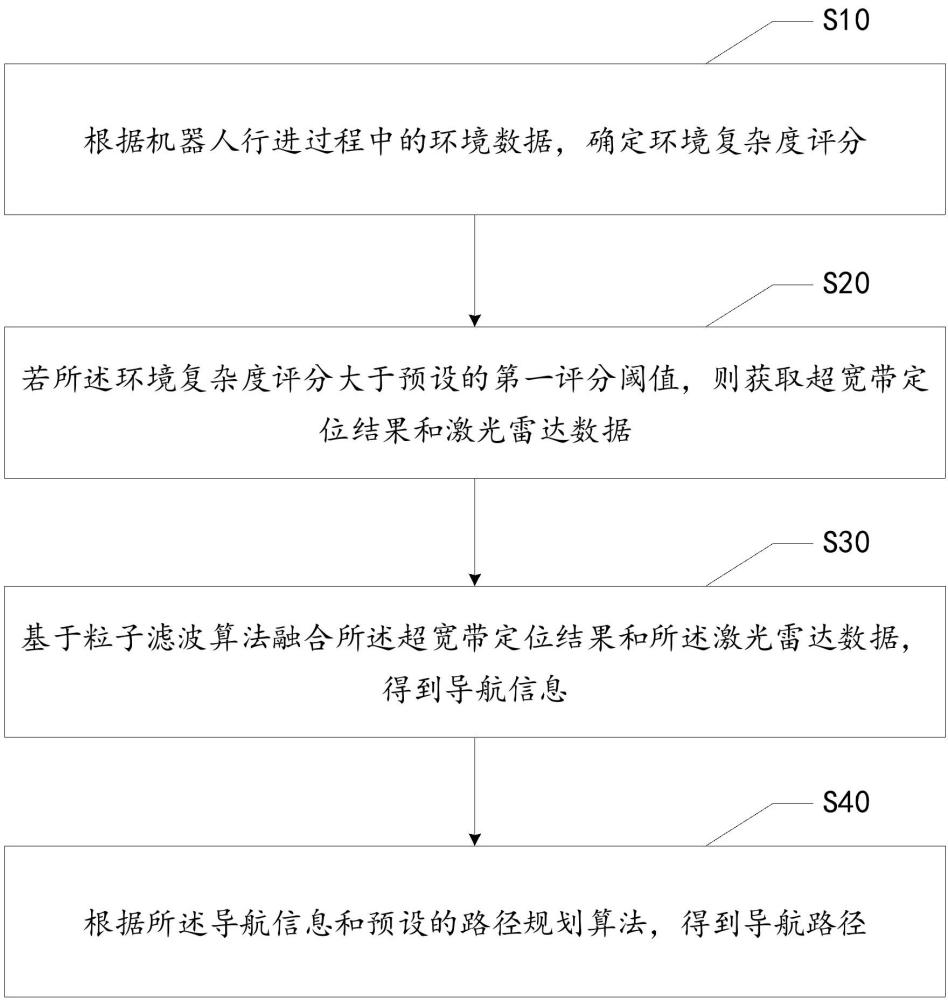
3、根據機器人行進過程中的環境數據,確定環境復雜度評分;
4、若所述環境復雜度評分大于預設的第一評分閾值,則獲取超寬帶定位結果和激光雷達數據;
5、基于粒子濾波算法融合所述超寬帶定位結果和所述激光雷達數據,得到導航信息;
6、根據所述導航信息和預設的路徑規劃算法,得到導航路徑。
7、在一實施例中,所述基于粒子濾波算法融合所述超寬帶定位結果和所述激光雷達數據,得到導航信息的步驟包括:
8、根據所述超寬帶定位結果生成初始粒子集;
9、獲取所述初始粒子集中的初始粒子到激光雷達傳感器的預測距離,并獲取所述預測距離到實際距離的差異值;
10、根據所述差異值和高斯分布的概率密度函數獲取似然值,根據所述似然值更新所述初始粒子的權重,得到第二權重;
11、根據所述第二權重更新所述初始粒子集,得到第一粒子集,將所述第一粒子集中的第一粒子的狀態進行加權平均,得到所述導航信息。
12、在一實施例中,所述根據機器人行進過程中的環境數據,確定環境復雜度評分的步驟包括:
13、獲取所述機器人在行進過程中的點云數據、第一圖像數據以及超寬帶信號數據;
14、從所述點云數據中提取出貨架特征信息,根據聚類算法對所述貨架特征信息進行分組,確定貨架以及貨架密度;
15、根據所述點云數據和所述第一圖像數據進行動態障礙物識別,得到動態障礙物數;
16、根據預設的超寬帶定位模型獲取預測數據,并獲取所述預測數據和所述超寬帶信號數據之間的超寬帶信號殘差;
17、根據所述貨架密度、所述動態障礙物數以及所述超寬帶信號殘差進行加權平均計算,得到所述環境復雜度評分。
18、在一實施例中,所述根據所述點云數據和所述圖像數據進行動態障礙物識別,得到動態障礙物數的步驟包括:
19、對所述點云數據進行聚類,得到點云簇;
20、獲取相鄰幀之間所述點云簇的簇中心的位移量,將所述位移量大于預設位移量閾值的點云簇標記為動態簇;
21、根據目標檢測算法在所述第一圖像數據中進行障礙物檢測,得到障礙物邊界框;
22、獲取所述障礙物邊界框的中心點的移動速度,將所述移動速度大于預設移動速度閾值的障礙物標記為動態目標;
23、去除重復的所述動態簇和所述動態目標,將去重后的動態簇數和動態目標數確認為所述動態障礙物數。
24、在一實施例中,在所述根據機器人行進過程中的環境數據,確定環境復雜度評分的步驟之后包括:
25、若所述環境復雜度評分小于預設的第二評分閾值,則獲取磁條傳感器輸出的磁條信息,并獲取圖像傳感器輸出的第二圖像數據;
26、基于卡爾曼濾波算法,對所述磁條信息和所述第二圖像數據將進行融合,得到所述導航信息。
27、在一實施例中,在所述基于卡爾曼濾波算法,對所述磁條信息和所述第二圖像數據將進行融合,得到所述導航信息的步驟之前包括:
28、根據圖像特征檢測算法在連續幀圖像中獲取特征點,并對所述特征點進行匹配;
29、獲取匹配成功的目標特征點數量,根據所述目標特征點數量確定匹配率;
30、當所述匹配率低于預設匹配率時,根據磁條信息確定所述導航信息。
31、在一實施例中,在所述根據所述導航信息和預設的路徑規劃算法,得到導航路徑的步驟之后包括:
32、當檢測到超寬帶信號強度小于預設信號強度閾值,且磁條噪聲大于預設的噪聲閾值,則確認所述機器人處于信號干擾區;
33、將磁條傳感器輸出的磁條信號和慣性測量單元輸出的慣性測量數據進行融合,得到目標導航信息。
34、在一實施例中,在所述根據所述導航信息和預設的路徑規劃算法,得到導航路徑的步驟之后包括:
35、將所述導航路徑作為節點,根據路徑連接關系添加邊,得到沖突預測圖;
36、根據環路檢測算法遍歷所述沖突預測圖中的所述節點和所述邊,確定是否存在死鎖環路;
37、若存在,則獲取死鎖環路上的目標機器人的備選路徑,并根據所述備選路徑控制所述目標機器人行進。
38、此外,為實現上述目的,本申請還提出一種機器人的路徑規劃設備,所述設備包括:存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述計算機程序配置為實現如上文所述的機器人的路徑規劃方法的步驟。
39、此外,為實現上述目的,本申請還提出一種存儲介質,所述存儲介質為計算機可讀存儲介質,所述存儲介質上存儲有計算機程序,所述計算機程序被處理器執行時實現如上文所述的機器人的路徑規劃方法的步驟。
40、本申請提出一種機器人的路徑規劃方法,將環境復雜度評分作為判斷是否需要啟用更復雜的傳感器數據的依據,當環境復雜度評分大于預設的第一評分閾值,環境復雜度較高時,融合超寬帶定位結果和激光雷達數據,超寬帶定位提供了高精度的位置信息,而激光雷達則能夠詳細描繪出周圍環境的三維結構,兩者結合可以提高導航的精確度和安全性。動態切換導航方式使機器人能夠更好地適應不同復雜度的環境,在簡單環境中,采用較為基礎的導航方式,可以避免不必要的復雜計算和高能耗傳感器的使用,從而節省計算資源和電力,延長機器人的運行時間。在復雜環境中,切換至更準確的導航方式,可以確保導航的精確性和安全性。
技術特征:
1.一種機器人的路徑規劃方法,其特征在于,所述機器人的路徑規劃方法包括:
2.如權利要求1所述的機器人的路徑規劃方法,其特征在于,所述基于粒子濾波算法融合所述超寬帶定位結果和所述激光雷達數據,得到導航信息的步驟包括:
3.如權利要求1所述的機器人的路徑規劃方法,其特征在于,所述根據機器人行進過程中的環境數據,確定環境復雜度評分的步驟包括:
4.如權利要求3所述的機器人的路徑規劃方法,其特征在于,所述根據所述點云數據和所述圖像數據進行動態障礙物識別,得到動態障礙物數的步驟包括:
5.如權利要求1所述的機器人的路徑規劃方法,其特征在于,在所述根據機器人行進過程中的環境數據,確定環境復雜度評分的步驟之后包括:
6.如權利要求5所述的機器人的路徑規劃方法,其特征在于,在所述基于卡爾曼濾波算法,對所述磁條信息和所述第二圖像數據將進行融合,得到所述導航信息的步驟之前包括:
7.如權利要求1所述的機器人的路徑規劃方法,其特征在于,在所述根據機器人行進過程中的環境數據,確定環境復雜度評分的步驟之后包括:
8.如權利要求1所述的機器人的路徑規劃方法,其特征在于,在所述根據所述導航信息和預設的路徑規劃算法,得到導航路徑的步驟之后包括:
9.一種機器人的路徑規劃設備,其特征在于,所述設備包括:存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述計算機程序配置為實現如權利要求1至8中任一項所述的機器人的路徑規劃方法的步驟。
10.一種存儲介質,其特征在于,所述存儲介質為計算機可讀存儲介質,所述存儲介質上存儲有計算機程序,所述計算機程序被處理器執行時實現如權利要求1至8中任一項所述的機器人的路徑規劃方法的步驟。
技術總結
本申請公開了一種機器人的路徑規劃方法、設備及存儲介質,涉及數據處理技術領域,包括:根據機器人行進過程中的環境數據,確定環境復雜度評分;若環境復雜度評分大于預設的第一評分閾值,則獲取超寬帶定位結果和激光雷達數據;基于粒子濾波算法融合超寬帶定位結果和激光雷達數據,得到導航信息;根據導航信息和預設的路徑規劃算法,得到導航路徑。本申請通過動態切換導航方式,能夠使機器人能夠更好地適應不同復雜度的環境。
技術研發人員:吳小倩,彭湘培,黃岳,樊克勝
受保護的技術使用者:深圳市磅旗科技智能發展有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!