機器人配送方法、配送系統及計算機程序產品與流程
本技術涉及機器人,尤其涉及機器人配送方法、配送系統及計算機程序產品。
背景技術:
1、隨著科技的不斷進步與創新,多機器人多訂單配送模式逐漸在配送服務中展現出巨大潛力,多機器人多訂單配送通過利用了自動化技術、精密的路徑規劃算法以及高效的實時數據處理能力,提供高效高質的配送服務。但在實際應用過程中,多機器人系統在規劃路徑時,主要側重于優化單臺機器人的行駛路徑,力求實現個體機器人的最高效運行,這種單一視角的規劃方式,雖然在一定程度上提升了單個機器人的配送效率,卻忽略了全局路徑優化,導致在復雜的配送環境中,多臺機器人可能在同一時間或相近時間段內經過相近的路徑點,從而導致各臺機器人之間產生路徑沖突,影響了配送過程中機器人的安全性。
2、上述內容僅用于輔助理解本技術的技術方案,并不代表承認上述內容是現有技術。
技術實現思路
1、本技術的主要目的在于提供一種機器人配送方法、配送系統及計算機程序產品,旨在解決多機器人多訂單配送過程中機器人安全性受到影響的技術問題。
2、為實現上述目的,本技術提出一種機器人配送方法,所述機器人配送方法應用于調度系統,所述機器人配送方法包括:
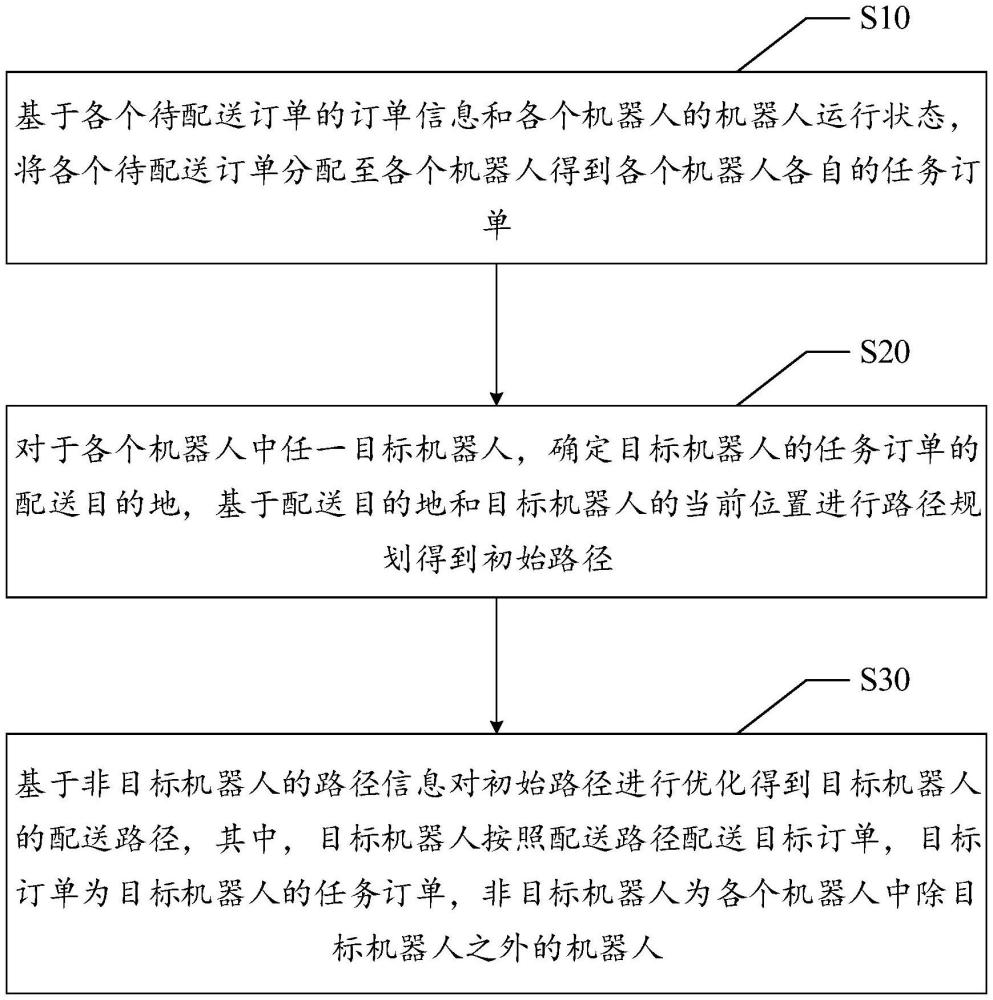
3、基于各個待配送訂單的訂單信息和各個機器人的機器人運行狀態,將各個所述待配送訂單分配至各個所述機器人得到各個所述機器人各自的任務訂單;
4、對于各個所述機器人中任一目標機器人,確定所述目標機器人的任務訂單的配送目的地,基于所述配送目的地和所述目標機器人的當前位置進行路徑規劃得到初始路徑;
5、基于非目標機器人的路徑信息對所述初始路徑進行優化得到所述目標機器人的配送路徑,其中,所述目標機器人按照所述配送路徑配送目標訂單,所述目標訂單為所述目標機器人的任務訂單,所述非目標機器人為各個所述機器人中除所述目標機器人之外的機器人。
6、在一實施例中,所述基于各個待配送訂單的訂單信息和各個機器人的機器人運行狀態,將各個所述待配送訂單分配至各個所述機器人得到各個所述機器人各自的任務訂單的步驟,包括:
7、基于各個待配送訂單的訂單信息和各個所述機器人的機器人運行狀態構建成本矩陣,其中,所述成本矩陣中各個元素表征所述機器人配送所述待配送訂單的資源消耗成本;
8、基于預設優化算法和所述成本矩陣將各個所述待配送訂單分配至各個所述機器人。
9、在一實施例中,所述基于各個待配送訂單的訂單信息和各個所述機器人的機器人運行狀態構建成本矩陣的步驟之前,還包括:
10、檢測所述待配送訂單中是否存在緊急訂單;
11、若不存在所述緊急訂單,則執行所述基于各個待配送訂單的訂單信息和各個所述機器人的機器人運行狀態構建成本矩陣的步驟及后續步驟。
12、在一實施例中,所述檢測所述待配送訂單中是否存在緊急訂單的步驟之后,還包括:
13、若所述待配送訂單中存在所述緊急訂單,則遍歷各個所述機器人,基于所述緊急訂單對應的緊急配送目的地和所述機器人的當前位置進行路徑規劃,得到所述機器人的配送時長;
14、從各個所述機器人中確定配送時長最短的近距離機器人,將所述緊急訂單分配至所述近距離機器人,并以所述緊急訂單的配送目的地和所述近距離機器人的當前位置進行路徑規劃得到緊急配送路徑,其中,所述近距離機器人按照所述緊急配送路徑配送所述緊急訂單;
15、基于非緊急訂單的訂單信息和各個所述機器人運行狀態,將各個所述非緊急訂單分配至各個所述機器人得到各個所述機器人各自的任務訂單,其中,所述非緊急訂單為各個所述待配送訂單中除所述緊急訂單之外的訂單。
16、在一實施例中,所述基于非目標機器人的路徑信息對所述初始路徑進行優化得到所述目標機器人的配送路徑的步驟之后,還包括:
17、若所述目標機器人存在運行故障,則基于所述目標機器人發生所述運行故障時所處位置的故障地位置信息,更新機器人訂單的訂單信息得到重分配訂單,其中,所述機器人訂單為所述機器人配送的訂單;
18、基于所述重分配訂單的訂單信息和各個所述非目標機器人的機器人運行狀態,從各個所述非目標機器人中確定配送所述重分配訂單的重配送機器人;
19、基于所述重分配訂單的訂單信息和所述重配送機器人所處的環境位置,對所述重配送機器人進行路徑規劃得到目標路徑,其中,所述重配送機器人按照所述目標路徑配送所述重分配訂單。
20、在一實施例中,所述基于非目標機器人的路徑信息對所述初始路徑進行優化得到所述目標機器人的配送路徑的步驟之后,還包括:
21、獲取所述目標機器人所處運行環境的環境信息;
22、若基于所述環境信息檢測到所述目標機器人的配送路徑上存在環境障礙,則基于所述環境障礙的環境障礙位置對所述配送路徑進行優化得到優化后路徑,其中,所述目標機器人按照所述優化后路徑配送所述目標訂單。
23、為實現上述目的,本技術提出一種機器人配送方法,所述機器人配送方法應用于各個機器人中任一目標機器人,所述機器人配送方法包括:
24、接收如上文所述的機器人配送方法中的調度系統發送的目標訂單和配送路徑;
25、按照所述配送路徑配送所述目標訂單。
26、在一實施例中,若檢測到環境障礙,則檢測所述運行故障是否為移動障礙;
27、若所述運行故障不為所述移動障礙,則將所述環境障礙發送至所述調度系統,并接收所述調度系統返回的避障路徑,按照所述避障路徑配送所述任務訂單,其中,所述調度系統基于所述環境障礙的環境障礙位置對所述配送路徑進行優化得到所述優化后路徑;
28、若所述環境障礙為所述移動障礙,則基于所述環境障礙的障礙類型進行避障處理,并在所述環境障礙不存在后,按照所述配送路徑配送所述目標訂單。
29、此外,為實現上述目的,本技術還提出一種配送系統,所述配送系統包括:
30、如上文所述的機器人配送方法中的調度系統;
31、如上文所述的機器人配送方法中的目標機器人。
32、此外,為實現上述目的,本技術還提供一種計算機程序產品,所述計算機程序產品包括計算機程序,所述計算機程序被處理器執行時實現如上文所述的機器人配送方法的步驟。
33、本技術中,調度系統基于各個待配送訂單的訂單信息和各個機器人的機器人運行狀態,將各個所述待配送訂單分配至各個所述機器人得到各個所述機器人各自的任務訂單,通過將各個待配送訂單合理分配至各個機器人,確保每個機器人都能獲得與其狀態和能力相匹配的待配送訂單,從而避免機器人過度負載,提高機器人的運行安全性。
34、對于各個所述機器人中任一目標機器人,確定所述目標機器人的任務訂單的配送目的地,基于所述配送目的地和所述目標機器人的當前位置進行路徑規劃得到初始路徑;基于非目標機器人的路徑信息對所述初始路徑進行優化得到所述目標機器人的配送路徑,其中,所述目標機器人按照所述配送路徑配送所述目標訂單。通過調度系統結合各個機器人的路徑信息,對目標機器人配送訂單的初始路徑進行優化,可以實現在路徑規劃階段結合全局視角進行路徑規劃,避免在復雜的配送環境中出現多臺機器人同時或相近時間段內爭奪同一空間資源的情況,從而避免各個機器人配送過程中出現路徑沖突和擁堵,提高機器人配送過程中的安全性。
- 還沒有人留言評論。精彩留言會獲得點贊!