AGV無線手柄控制電路的制作方法
本技術涉及一種使用無線手柄與多臺agv進行通訊的控制電路,屬于電氣與自動化控制領域。
背景技術:
1、agv無線控制技術正日益得到廣泛應用,在自動運行狀態時通常是由機器人調度軟件進行控制,但目前無線控制技術還存在操控距離較近,對應用現場環境條件要求較高等缺陷。另外,現有無線控制普遍地采用藍牙技術,同時操控數量較少通常僅限于一對一操作,因此還無法滿足實際使用需求。
2、有鑒于此,特提出本專利申請。
技術實現思路
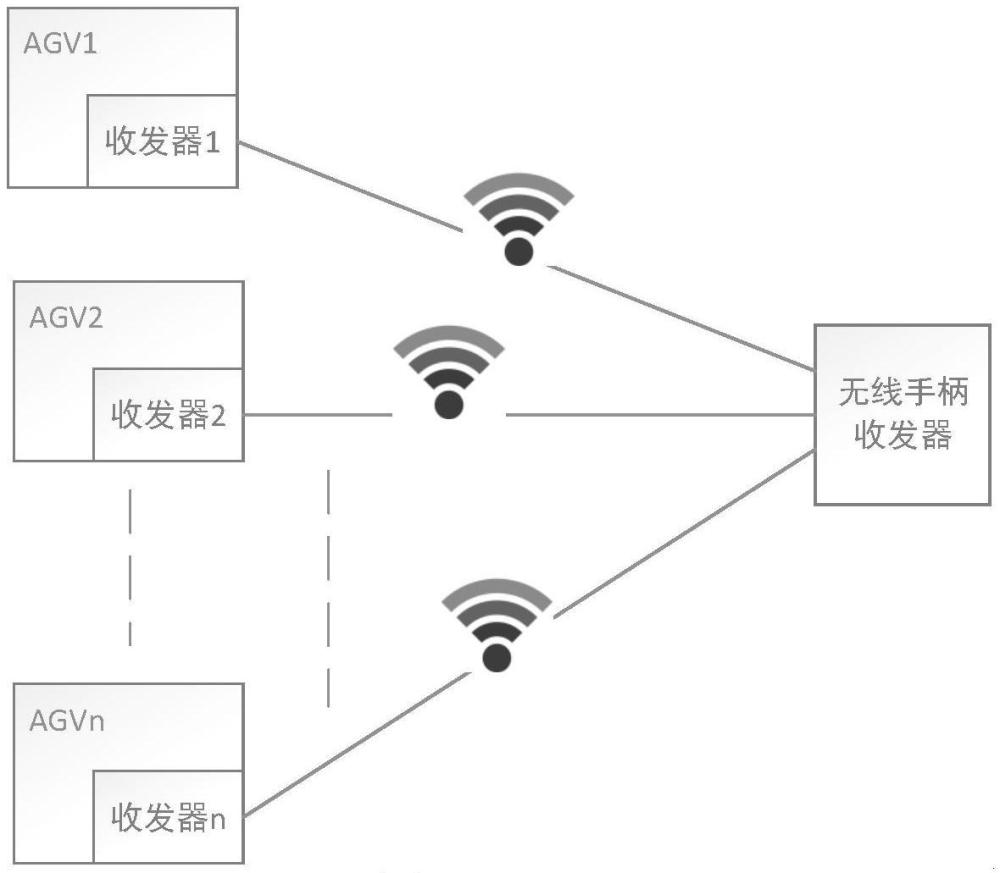
1、本實用新型所述的agv無線手柄控制電路,在于解決上述現有技術存在的問題而提出由一個無線手柄收發器與多臺agv端收發器組成的控制系統電路,每臺agv端收發器具有唯一編號或地址,通過無線信號通訊實現手柄與多臺agv分別建立配對和控制指令執行,從而達到適應惡劣環境、不同場景、長距離與一對多操控agv的設計目的。
2、為實現上述設計目的,所述的agv無線手柄控制電路包括通過無線通訊進行連接的無線手柄端收發器和agv端收發器,每一agv端收發器具有唯一的編號或地址;所述的無線手柄端收發器由第一微處理器芯片(u6)、第一rf模塊芯片(u7)、第一射頻開關模塊芯片(u8)、第一agv編號選擇編碼開關(u9)、第二agv編號選擇編碼開關(u10)、手柄操控旋鈕(u11)和濾波電容組成;所述的agv端收發器由第二微處理器芯片(u1)、第二rf模塊芯片(u4)、第二射頻開關模塊(u5)、第三agv編號設定編碼開關(u2)、第四agv編號設定編碼開關(u3)、agv控制器(u0)和濾波電容組成。
3、進一步地,所述的無線手柄端收發器,第一微處理器芯片(u6)采用st公司的stm32f103t6芯片,第一8m晶振(y3)連接至第一微處理器芯片(u6)的第5和第6管腳,電源濾波電容(c37)與第一微處理器芯片(u6)并聯于電源vcc和gnd之間;第一rf模塊芯片(u7)采用hoperf公司的cmt2300a芯片,第一26m晶振(y2)連接至第一rf模塊芯片(u7)的第13和第14管腳,數個電源濾波電容與第一rf模塊芯片(u7)并聯于電源vcc和gnd之間;第一射頻開關模塊芯片(u8)采用as129-92lf芯片;第一agv編號選擇編碼開關(u9)、第二agv編號選擇編碼開關(u10)為2個旋轉編碼開關,每個旋轉編碼開關均具有0-9的編碼選擇,第一agv編號選擇編碼開關(u9)作為編碼數據的個位數值,第二agv編號選擇編碼開關(u10)作為編碼數據的十位數值;第一agv編號選擇編碼開關(u9)與第一微處理器芯片(u6)的pb8-pb11管腳分別連接,第二agv編號選擇編碼開關(u10)與第一微處理器芯片u6的pb12-pb15管腳連接;手柄操控旋鈕(u11)分別連接第一微處理器芯片(u6)的pb0、pb1、pa8至pa15管腳。
4、進一步地,所述的agv端收發器,第二微處理器芯片(u1)采用st公司的stm32f103t6芯片,第二8m晶振(y4)連接第二微處理器芯片(u1)的第5和第6管腳,電源vdd和vss從agv控制器(u0)取電并為第二微處理器芯片(u1)、第二rf模塊芯片(u4)分別供電;第二rf模塊芯片(u4)采用hoperf公司的cmt2300a芯片,第二26m晶振(y1)連接第二rf模塊芯片(u4)的第13和第14管腳,數個電源濾波電容分別與第二rf模塊芯片(u4)并聯于電源vcc和gnd之間;第二射頻開關模塊(u5)采用as129-92lf芯片;第三agv編號設定編碼開關(u2)、第四agv編號設定編碼開關(u3)是2個旋轉編碼開關,每個旋轉編碼開關均具有0-9的編碼選擇,第三agv編號設定編碼開關(u2)作為編碼數據的個位數值,第四agv編號設定編碼開關(u3)作為編碼數據的十位數值;第三agv編號設定編碼開關(u2)與第二微處理器芯片(u1)的pb8-pb11管腳分別連接,第四agv編號設定編碼開關(u3)與第二微處理器芯片(u1)的pb12-pb15管腳連接;agv控制器(u0)與第二微處理器芯片(u1)之間采用串口通訊。
5、綜上內容,本申請提出的agv無線手柄控制電路具有以下優點:
6、1、本申請實現了使用一個無線手柄可同時控制多臺agv的技術手段,整體管理環境成本較低、作業效率較高;
7、2、本申請無線操控距離較長,而且能夠適用各類場景,對于現場環境適應性較強;
8、3、本申請實現了遠程操控,有效地增大了agv作業面積、控制靈活高效,相應提高了生產現場的安全性能。
技術特征:
1.一種agv無線手柄控制電路,其特征在于:包括通過無線通訊進行連接的無線手柄端收發器和agv端收發器,每一agv端收發器具有唯一的編號或地址;
2.根據權利要求1所述的agv無線手柄控制電路,其特征在于:所述的無線手柄端收發器,第一微處理器芯片(u6)采用st公司的stm32f103t6芯片,第一8m晶振(y3)連接至第一微處理器芯片(u6)的第5和第6管腳,電源濾波電容(c37)與第一微處理器芯片(u6)并聯于電源vcc和gnd之間;
3.根據權利要求2所述的agv無線手柄控制電路,其特征在于:所述的agv端收發器,第二微處理器芯片(u1)采用st公司的stm32f103t6芯片,第二8m晶振(y4)連接第二微處理器芯片(u1)的第5和第6管腳,電源vdd和vss從agv控制器(u0)取電并為第二微處理器芯片(u1)、第二rf模塊芯片(u4)分別供電;
技術總結
本技術所述的AGV無線手柄控制電路,提出由無線手柄收發器與多臺AGV端收發器組成的控制系統電路,每臺AGV端收發器具有唯一編號或地址,通過無線信號通訊實現手柄與多臺AGV分別建立配對和控制指令執行,從而達到適應惡劣環境、不同場景、長距離與一對多操控AGV的設計目的。包括通過無線通訊進行連接的無線手柄端收發器和AGV端收發器,無線手柄端收發器由第一微處理器芯片、第一RF模塊芯片、第一射頻開關模塊芯片、第一AGV編號選擇編碼開關、第二AGV編號選擇編碼開關、手柄操控旋鈕和濾波電容組成;所述的AGV端收發器由第二微處理器芯片、第二RF模塊芯片、第二射頻開關模塊、第三AGV編號設定編碼開關、第四AGV編號設定編碼開關、AGV控制器和濾波電容組成。
技術研發人員:歐立生,楊帥軍,李先鋒
受保護的技術使用者:青島螞蟻機器人有限責任公司
技術研發日:20240830
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!