一種超臨界水氣化反應(yīng)器控制方法、系統(tǒng)、設(shè)備及介質(zhì)
本發(fā)明屬于生物質(zhì)熱化學(xué)利用領(lǐng)域,具體涉及一種超臨界水氣化反應(yīng)器控制方法、系統(tǒng)、設(shè)備及介質(zhì)。
背景技術(shù):
1、隨著經(jīng)濟的快速發(fā)展,傳統(tǒng)化石燃料日漸枯竭,因此發(fā)展替代性能源成為人類必須攻克的難題。我國生物質(zhì)能含量豐富,是一項較為有潛力的替代可再生能源,因此開發(fā)高效的生物質(zhì)利用方式至關(guān)重要。超臨界水氣化技術(shù)可將生物質(zhì)廢棄物轉(zhuǎn)化為富氫燃氣,可從源頭上抑制污染物的生成,是一項清潔高效的生物質(zhì)高效利用方式。其中,反應(yīng)器是超臨界水氣化系統(tǒng)的核心,實現(xiàn)其動態(tài)調(diào)控是該技術(shù)工業(yè)化應(yīng)用的重要前提。
2、傳統(tǒng)的生物質(zhì)超臨界水氣化反應(yīng)器研究方法為實驗法和數(shù)值模擬,但是超臨界水所處的高溫高壓條件限制了通過實驗方法獲得反應(yīng)器內(nèi)部詳細的流動傳熱以及化學(xué)反應(yīng)信息,數(shù)值模擬方法則可避免此缺點,其在該類研究中起到了至關(guān)重要的作用。當前國內(nèi)外諸多學(xué)者對超臨界水氣化反應(yīng)器開展了大量的數(shù)值模擬研究,cfd數(shù)值模擬由于考慮了過多關(guān)于氣化過程反應(yīng)器內(nèi)多相流動,傳熱以及化學(xué)反應(yīng)的信息,導(dǎo)致參數(shù)量多,計算量大,計算成本高,模型移植性差,故使用此方法開展動態(tài)模擬求解具有一定的局限性。學(xué)者們通過建立反應(yīng)器的降階模型來解決此問題,根據(jù)反應(yīng)器內(nèi)部流動結(jié)構(gòu)不同(即流場分布特征),用簡單反應(yīng)器分別代替流化床反應(yīng)器內(nèi)各區(qū)域,而后通過簡單反應(yīng)器的串并聯(lián)來構(gòu)建反應(yīng)器網(wǎng)絡(luò)以代替復(fù)雜真實反應(yīng)器,即建立反應(yīng)器網(wǎng)絡(luò)模型(rnm)代替復(fù)雜的流化床反應(yīng)器,進而基于此rnm建立反應(yīng)器降階模型。通過該方法一方面可以獲得反應(yīng)器內(nèi)精確的溫度流場以及組分場分布,另一方面其相比于cfd,具有計算更為簡單快捷,模型可移植性好的優(yōu)勢。
3、但是上述反應(yīng)器網(wǎng)絡(luò)模型多為反應(yīng)器開環(huán)動態(tài)特性研究,其可為反應(yīng)器的設(shè)計提供理論指導(dǎo),但是如若想達到預(yù)期特定的控制目標,則需要在開環(huán)動態(tài)模擬的基礎(chǔ)上添加控制結(jié)構(gòu),以便最終實現(xiàn)優(yōu)化控制,當前研究多基于pid控制器對反應(yīng)器的動態(tài)模型進行控制以維持反應(yīng)器的穩(wěn)定性,其只能處理單輸入單輸出的控制問題,而化學(xué)反應(yīng)工程中超臨界水氣化反應(yīng)器由于反應(yīng)、分離網(wǎng)絡(luò)、多個控制回路相互關(guān)聯(lián)、控制對之間具有相互作用以及循環(huán)流的雪球效應(yīng),極其復(fù)雜,操控變量及被控變量不止一個,為經(jīng)典的多輸入多輸出問題,因此,當采用現(xiàn)有的pid控制器對超臨界水氣化反應(yīng)器進行控制時,由于其與超臨界水氣化反應(yīng)器的適應(yīng)性較差,從而不能對反應(yīng)器進行穩(wěn)定控制。
技術(shù)實現(xiàn)思路
1、為了克服上述現(xiàn)有技術(shù)存在的不足,本發(fā)明提供了一種超臨界水氣化反應(yīng)器控制方法,包括如下步驟:
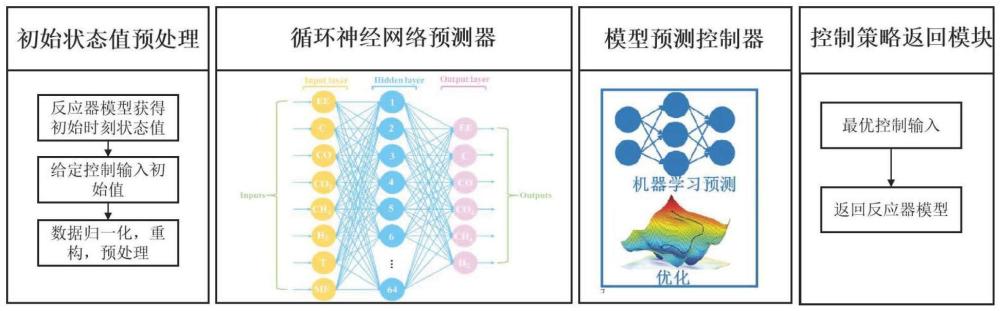
2、構(gòu)建超臨界水氣化反應(yīng)器的仿真模型,使用所述仿真模型獲取超臨界水氣化反應(yīng)器的多個狀態(tài)變量的初始值;
3、根據(jù)多個狀態(tài)變量構(gòu)建多目標優(yōu)化函數(shù),將多目標優(yōu)化函數(shù)與循環(huán)神經(jīng)網(wǎng)絡(luò)rnn進行耦合,得到模型預(yù)測控制器;
4、獲取多個控制輸入變量的初始值,將多個狀態(tài)變量的初始值及多個控制輸入變量的初始值輸入模型預(yù)測控制器,使用多目標優(yōu)化函數(shù)調(diào)節(jié)每個優(yōu)化目標所對應(yīng)權(quán)重值,并對多目標優(yōu)化函數(shù)進行求解,得到下一時刻的控制輸入變量的值;將下一時刻的控制輸入變量的值重新輸入仿真模型,獲取下一時刻的狀態(tài)變量的值,將下一時刻的控制輸入變量的值及下一時刻的狀態(tài)變量的值重新輸入模型預(yù)測控制器,重復(fù)多目標優(yōu)化函數(shù)調(diào)節(jié)每個優(yōu)化目標的過程,直至多目標優(yōu)化函數(shù)最小化,得到最佳的控制輸入變量的值。
5、優(yōu)選的,所述將多個狀態(tài)變量的初始值及多個控制輸入變量的初始值輸入模型預(yù)測控制器之前,還包括對控制輸入變量的初始值和狀態(tài)變量的初始值進行預(yù)處理,具體為:對控制輸入變量的初始值和狀態(tài)變量的初始值進行進行歸一化處理,將數(shù)據(jù)映射到[0,1]范圍內(nèi)。
6、優(yōu)選的,所述將多目標優(yōu)化函數(shù)與循環(huán)神經(jīng)網(wǎng)絡(luò)rnn進行耦合之前,還包括對循環(huán)神經(jīng)網(wǎng)絡(luò)rnn進行訓(xùn)練,具體為:將多個狀態(tài)變量的初始值及多個控制輸入變量的初始值,采用非線性激活函數(shù),并基于梯度下降法求解,根據(jù)自適應(yīng)矩估計方法計算循環(huán)神經(jīng)網(wǎng)絡(luò)rnn訓(xùn)練和預(yù)測誤差,選用預(yù)測值和實際值之間的平均平方誤差作為誤差函數(shù),當誤差小于設(shè)定閾值后終止訓(xùn)練,得到訓(xùn)練好的循環(huán)神經(jīng)網(wǎng)絡(luò)rnn,所述設(shè)定閾值為4×e-5。
7、優(yōu)選的,所述多目標優(yōu)化函數(shù)如下:
8、
9、或
10、式中,q1、q2、q3和q4分別代表不同優(yōu)化目標的權(quán)重,co、co2、ch4和h2分別代表不同氣體組分的產(chǎn)量,c代表生物炭的產(chǎn)量。
11、優(yōu)選的,所述仿真模型包括全混流反應(yīng)器和兩個平推流反應(yīng)器。
12、優(yōu)選的,所述控制輸入變量為反應(yīng)器壁面溫度和混合物質(zhì)量流速。
13、優(yōu)選的,所述狀態(tài)變量包括反應(yīng)器能量效率、四種不同組分氣體co,co2,ch4,h2的產(chǎn)量及生物炭產(chǎn)量。
14、本發(fā)明還提供有一種超臨界水氣化反應(yīng)器控制系統(tǒng),包括:
15、參數(shù)獲取模塊,用于構(gòu)建超臨界水氣化反應(yīng)器的仿真模型,使用所述仿真模型獲取超臨界水氣化反應(yīng)器的多個狀態(tài)變量的初始值;
16、模型預(yù)測控制器獲取模塊,用于根據(jù)多個狀態(tài)變量構(gòu)建多目標優(yōu)化函數(shù),將多目標優(yōu)化函數(shù)與循環(huán)神經(jīng)網(wǎng)絡(luò)rnn進行耦合,得到模型預(yù)測控制器;
17、優(yōu)化控制模塊,用于獲取多個控制輸入變量的初始值,將多個狀態(tài)變量的初始值及多個控制輸入變量的初始值輸入模型預(yù)測控制器,使用多目標優(yōu)化函數(shù)調(diào)節(jié)每個優(yōu)化目標所對應(yīng)權(quán)重值,并對多目標優(yōu)化函數(shù)進行求解,得到下一時刻的控制輸入變量的值;將下一時刻的控制輸入變量的值重新輸入仿真模型,獲取下一時刻的狀態(tài)變量的值,將下一時刻的控制輸入變量的值及下一時刻的狀態(tài)變量的值重新輸入模型預(yù)測控制器,重復(fù)多目標優(yōu)化函數(shù)調(diào)節(jié)每個優(yōu)化目標的過程,直至多目標優(yōu)化函數(shù)最小化,得到最佳的控制輸入變量的值。
18、本發(fā)明還提供有一種計算機設(shè)備,包括存儲器和處理器;所述存儲器存儲有計算機程序,所述處理器用于運行所述存儲器內(nèi)的計算機程序,以執(zhí)行所述超臨界水氣化反應(yīng)器控制方法。
19、本發(fā)明還提供有一種計算機可讀存儲介質(zhì),所述計算機可讀存儲介質(zhì)存儲有計算機程序,所述計算機程序適于處理器進行加載,以執(zhí)行所述超臨界水氣化反應(yīng)器控制方法。
20、本發(fā)明提供的超臨界水氣化反應(yīng)器控制方法、系統(tǒng)、設(shè)備及介質(zhì)具有以下
21、有益效果:
22、本發(fā)明通過構(gòu)建超臨界水氣化反應(yīng)器的仿真模型,能夠獲取超臨界水氣化反應(yīng)器的多個狀態(tài)變量的初始值;根據(jù)多個狀態(tài)變量能夠構(gòu)建能夠多目標優(yōu)化函數(shù),并通過將多目標優(yōu)化函數(shù)與循環(huán)神經(jīng)網(wǎng)絡(luò)rnn進行耦合,能夠得到模型預(yù)測控制器,該模型預(yù)測控制器通過能夠?qū)ΤR界水氣化反應(yīng)器的多個狀態(tài)變量及控制輸入變量進行多目標優(yōu)化控制,并不斷進行迭代,使目標優(yōu)化函數(shù)最小化,從而得到最佳的控制輸入變量,保證反應(yīng)器的穩(wěn)定控制。
技術(shù)特征:
1.一種超臨界水氣化反應(yīng)器控制方法,其特征在于,包括如下步驟:
2.根據(jù)權(quán)利要求1所述的超臨界水氣化反應(yīng)器控制方法,其特征在于,所述將多個狀態(tài)變量的初始值及多個控制輸入變量的初始值輸入模型預(yù)測控制器之前,還包括對控制輸入變量的初始值和狀態(tài)變量的初始值進行預(yù)處理,具體為:對控制輸入變量的初始值和狀態(tài)變量的初始值進行進行歸一化處理,將數(shù)據(jù)映射到[0,1]范圍內(nèi)。
3.根據(jù)權(quán)利要求1所述的超臨界水氣化反應(yīng)器控制方法,其特征在于,所述將多目標優(yōu)化函數(shù)與循環(huán)神經(jīng)網(wǎng)絡(luò)rnn進行耦合之前,還包括對循環(huán)神經(jīng)網(wǎng)絡(luò)rnn進行訓(xùn)練,具體為:將多個狀態(tài)變量的初始值及多個控制輸入變量的初始值,采用非線性激活函數(shù),并基于梯度下降法求解,根據(jù)自適應(yīng)矩估計方法計算循環(huán)神經(jīng)網(wǎng)絡(luò)rnn訓(xùn)練和預(yù)測誤差,選用預(yù)測值和實際值之間的平均平方誤差作為誤差函數(shù),當誤差小于設(shè)定閾值后終止訓(xùn)練,得到訓(xùn)練好的循環(huán)神經(jīng)網(wǎng)絡(luò)rnn,所述設(shè)定閾值為4×e-5。
4.根據(jù)權(quán)利要求1所述的超臨界水氣化反應(yīng)器控制方法,其特征在于,所述多目標優(yōu)化函數(shù)如下:
5.根據(jù)權(quán)利要求1所述的超臨界水氣化反應(yīng)器控制方法,其特征在于,所述仿真模型包括全混流反應(yīng)器和兩個平推流反應(yīng)器。
6.根據(jù)權(quán)利要求1所述的超臨界水氣化反應(yīng)器控制方法,其特征在于,所述控制輸入變量為反應(yīng)器壁面溫度和混合物質(zhì)量流速。
7.根據(jù)權(quán)利要求1所述的超臨界水氣化反應(yīng)器控制方法,其特征在于,所述狀態(tài)變量包括反應(yīng)器能量效率、四種不同組分氣體co,co2,ch4,h2的產(chǎn)量及生物炭產(chǎn)量。
8.一種超臨界水氣化反應(yīng)器控制系統(tǒng),其特征在于,包括:
9.一種計算機設(shè)備,其特征在于,包括存儲器和處理器;所述存儲器存儲有計算機程序,所述處理器用于運行所述存儲器內(nèi)的計算機程序,以執(zhí)行權(quán)利要求1-7任一項所述的超臨界水氣化反應(yīng)器控制方法。
10.一種計算機可讀存儲介質(zhì),其特征在于,所述計算機可讀存儲介質(zhì)存儲有計算機程序,所述計算機程序適于處理器進行加載,以執(zhí)行權(quán)利要求1-7任一項所述的超臨界水氣化反應(yīng)器控制方法。
技術(shù)總結(jié)
本發(fā)明提供了一種超臨界水氣化反應(yīng)器控制方法、系統(tǒng)、設(shè)備及介質(zhì),屬于生物質(zhì)熱化學(xué)利用領(lǐng)域,其方法包括如下步驟:構(gòu)建超臨界水氣化反應(yīng)器的仿真模型,獲取超臨界水氣化反應(yīng)器的多個狀態(tài)變量的初始值,根據(jù)多個狀態(tài)變量的值構(gòu)建多目標優(yōu)化函數(shù),將多目標優(yōu)化函數(shù)與循環(huán)神經(jīng)網(wǎng)絡(luò)RNN進行耦合,得到模型預(yù)測控制器;獲取多個控制輸入變量的初始值;將多個狀態(tài)變量的初始值及多個控制輸入變量的初始值輸入模型預(yù)測控制器,通過使多目標優(yōu)化函數(shù)最小化,求解最佳的控制輸入變量的值。本發(fā)明通過模型預(yù)測控制器能夠?qū)ΤR界水氣化反應(yīng)器進行多目標優(yōu)化控制,且可對控制輸入變量施加限制,從而得到最佳的控制輸入變量,保證反應(yīng)器的穩(wěn)定控制。
技術(shù)研發(fā)人員:王翠,白波,宗世超,王鵬乾,耿嘉峰
受保護的技術(shù)使用者:長安大學(xué)
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!