水下機器人的對接系統及方法、電子設備和存儲介質與流程
本技術涉及機器人控制的,具體而言,涉及一種水下機器人的對接系統及方法、電子設備和存儲介質。
背景技術:
1、水下機器人(underwater?vehicle)是可在水下環境中進行各種作業的智能機械設備。
2、水下機器人在水下環境作業時,可能會需要前往待對接目標進行對接。例如,當水下機器人的電量不足時,水下機器人需要前往待對接目標完成對接而進行充電。又例如,當水下機器人需要將作業數據回傳到控制中心時,也需要前往待對接目標完成作業數據的回傳任務。為了完成水下機器人的對接任務。現有技術通過設定對接系統,控制水下機器人完成對接任務。
3、現有技術方案的對接系統,采用單一的定位設備提供導航信息,以控制水下機器人完成對接任務。
4、本技術的發明人發現現有技術至少存在以下問題。當現有對接系統采用慣性導航系統對水下機器人進行導航時,慣性導航系統的定位精度隨著時間推移而逐漸降低,可能會造成水下機器人無法找到待對接目標,進而造成水下機器人無法順利完成對接任務。當現有對接系統采用光學定位裝置對水下機器人進行導航時,光學定位裝置可能會因為水下能見度低而定位失敗,造成水下機器人無法找到待對接目標,進而導致水下機器人無法順利對接。
5、背景技術部分的內容僅僅是公開人所知曉的技術,并不當然代表本領域的現有技術。
技術實現思路
1、本技術旨在解決上述提到的至少一個技術問題。
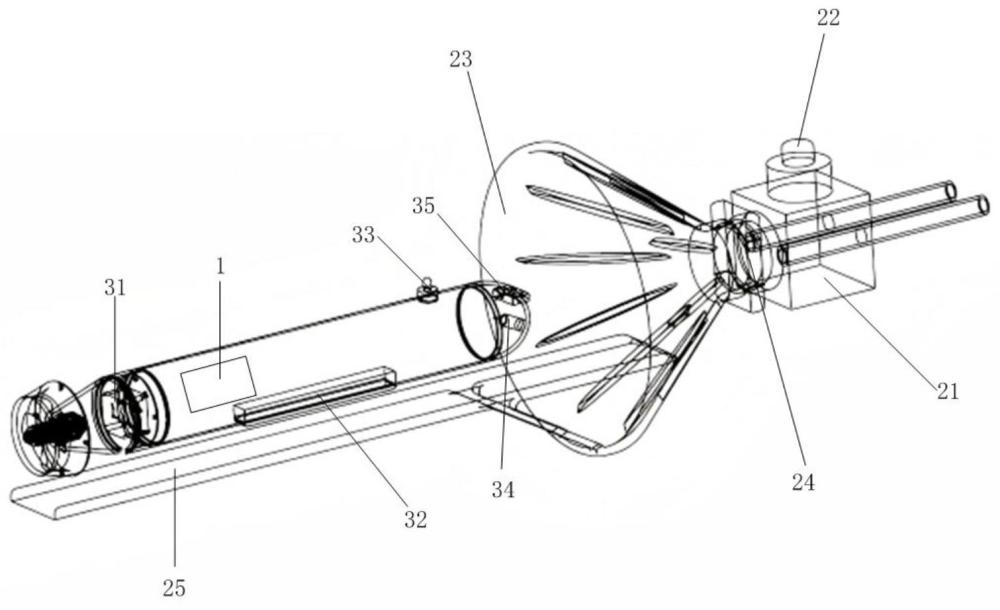
2、根據本技術的一方面,提供了一種水下機器人的對接系統。對接系統包括第一對接部、第二對接部和控制器。第一對接部,設于待對接目標位置,包括基座、引導部、金屬軌道和限位部。基座匹配水下機器人的對接端。引導部一端設于基座,另一端為喇叭狀開口。金屬軌道一端連接引導部。限位部設于引導部與基座的連接處。第二對接部,設于水下機器人,包括導航部和磁探測部。導航部用于確認并發送水下機器人的第一位置信息。磁探測部探測金屬軌道,生成并發送軌道探測信息。控制器設于水下機器人,基于接收的第一對接部的位置信息和第一位置信息生成并發送第一控制指令,以控制水下機器人向第一對接部運動。控制器還用于在判斷出第一位置信息滿足第一預設條件的情況下,生成并發送第一開啟指令,以開啟磁探測部,并基于接收的軌道探測信息生成并發送第二控制指令,以控制水下機器人向金屬軌道運動。控制器還用于基于軌道探測信息判斷出水下機器人進入金屬軌道的情況下,生成并發送第三控制指令,以控制水下機器人沿金屬軌道向基座運動,以使得水下機器人對接于基座。
3、根據本技術的一些實施例,控制器還用于在判斷出第一位置信息滿足第二預設條件的情況下,生成并發送第二開啟指令。第二對接部還包括聲學接收部。聲學接收部響應于第二開啟指令開啟,接收聲學發射部發送的聲波信息,以確認并發送水下機器人的第二位置信息,以使控制器基于接收的第一對接部的位置信息和第二位置信息生成并發送第四控制指令,以控制水下機器人向第一對接部運動。第一對接部還包括聲學發射部。聲學發射部用于發送聲波信息。
4、根據本技術的一些實施例,控制器還用于基于軌道探測信息判斷出水下機器人進入金屬軌道的情況下,生成并發送第三開啟指令。第二對接部還包括高度計。高度計響應于第三開啟指令開啟,確認并發送水下機器人的第三位置信息,以使控制器基于接收的第一對接部的位置信息和第三位置信息生成并發送第五控制指令,以控制水下機器人向基座運動,以使得水下機器人對接于基座。
5、根據本技術的一些實施例,控制器還用于基于軌道探測信息判斷出水下機器人進入金屬軌道的情況下,生成并發送第四開啟指令。第二對接部還包括視覺引導部。視覺引導部響應于所述第四開啟指令開啟,確認并發送水下機器人的第四位置信息,以使控制器基于接收的第一對接部的位置信息和第四位置信息生成并發送第六控制指令,以控制水下機器人向基座運動,以使得水下機器人對接于基座。
6、根據本技術的另一方面,還提供了一種水下機器人的對接方法。對接方法由對接系統的控制器執行。對接系統包括第一對接部、第二對接部和控制器。第一對接部包括基座、引導部、金屬軌道和限位部。第二對接部包括導航部和磁探測部。對接方法包括:接收第一對接部的位置信息和導航部發送的水下機器人的第一位置信息;發送基于第一對接部的位置信息和第一位置信息生成的第一控制指令,以控制水下機器人向第一對接部運動;在判斷出第一位置信息滿足第一預設條件的情況下,生成并發送第一開啟指令,以開啟磁探測部,以確認并發送軌道探測信息;發送基于接收的軌道探測信息生成的第二控制指令,以控制水下機器人向金屬軌道運動;在判斷出水下機器人進入金屬軌道的情況下,生成并發送第三控制指令,以控制水下機器人沿金屬軌道向基座運動,以使得水下機器人對接于基座。
7、根據本技術的一些實施例,在判斷出第一位置信息滿足第一預設條件的情況下,生成并發送第一開啟指令,以開啟磁探測部,以確認并發送軌道探測信息之前,對接方法還包括:在第一位置信息滿足第二預設條件的情況下,生成并發送第二開啟指令,以開啟聲學接收部,以使聲學接收部接收聲學發射部發送的聲波信息,以確認并發送水下機器人的第二位置信息,聲學接收部設于第一對接部,聲學發射部設于第二對接部;發送基于接收的第一對接部的位置信息和第二位置信息生成的第四控制指令,以控制水下機器人向第一對接部運動。
8、根據本技術的一些實施例,在判斷出水下機器人進入金屬軌道的情況下,生成并發送第三控制指令,以控制水下機器人沿金屬軌道向基座運動,以使得水下機器人對接于基座,包括:在判斷出水下機器人進入金屬軌道的情況下,生成并發送第三開啟指令,以開啟高度計,以使高度計確認并發送水下機器人的第三位置信息,高度計設于第二對接部;發送基于第一對接部的位置信息和第三位置信息生成的第五控制指令,以控制水下機器人向基座運動,以使得水下機器人對接于基座。
9、根據本技術的一些實施例,在判斷出水下機器人進入金屬軌道的情況下,生成并發送第三控制指令,以控制水下機器人沿金屬軌道向基座運動,以使得水下機器人對接于基座,包括:在判斷出水下機器人進入金屬軌道的情況下,生成并發送第四開啟指令,以開啟視覺引導部,以使視覺引導部確認并發送水下機器人的第四位置信息,視覺引導部設于第二對接部;發送基于第一對接部的位置信息和第四位置信息生成的第六控制指令,以控制水下機器人向基座運動,以使得水下機器人對接于基座。
10、根據本技術的另一方面,還提供一種電子設備。電子設備包括一個或多個處理器。存儲裝置用于存儲一個或多個程序。當一個或多個程序被一個或多個處理器執行,使得一個或多個處理器實現本技術的對接方法。
11、根據本技術的另一方面,還提供一種非易失性計算機可讀存儲介質。非易失性計算機可讀存儲介質存儲有計算機程序。計算機程序被處理器執行時實現本技術的對接方法。
12、有益效果
13、本技術的技術方案,通過導航部初步確認水下機器人的位置,控制水下機器人向待對接目標移動,完成了對水下機器人的初步引導。在水下機器人進入到磁探測部可以探測到金屬軌道的范圍內之后,通過磁探測部引導水下機器人向金屬軌道運動。磁探測的技術方案在渾濁水域或強水流環境中仍可以保持穩定的探測性能,進而提高了水下機器人對接過程的環境適應能力。水下機器人進入金屬軌道后沿金屬軌道向基座運動,對接于基座。本技術的技術方案通過導航定位、磁探測引導和機械限位的不同特性對水下機器人進行多級定位引導,提高了對接的成功率。
- 還沒有人留言評論。精彩留言會獲得點贊!