TOF模組的標定方法、裝置、計算機設備和存儲介質與流程
本技術涉及機器視覺,特別是涉及tof模組的標定方法、裝置、計算機設備和存儲介質。
背景技術:
1、目前三維視覺成像技術不斷發展,基于飛行時間(time?of?flight)的成像技術也隨之快速發展,tof模組被廣泛應用于多個領域,例如三維建模、障礙物檢測、姿態追蹤以及環境感知等。其中,tof模組通過測量從發射到接收所需的時間,計算其與物體之間的距離。因此,為了提高tof模組測量結果的準確性和可靠性,通常需要對tof模組進行標定。
2、目前的標定方法,通過標定模組的焦距、畸變系數等內參數據,實現芯片像素與發射角度的對應計算。利用上述方法標定視場角較大的tof模組時,需要為tof模組設置大型設備完成模組內參的矯正,但是實際應用過程中,無法提供上述大型設備,進而在不標定模組內參數據的情況下,無法獲取模組像素坐標與發射角之間的對應關系,以輸出最終的點云數據。
3、針對相關技術中存在不標定模組內參數據的情況下,無法獲取模組像素坐標與發射角之間的對應關系的問題,目前還沒有提出有效的解決方案。
技術實現思路
1、在本實施例中提供了一種tof模組的標定方法、裝置、計算機設備和存儲介質,以解決相關技術中在不標定模組內參數據的情況下,無法獲取模組像素坐標與發射角之間的對應關系的問題。
2、第一個方面,在本實施例中提供了一種tof模組的標定方法,所述方法包括:
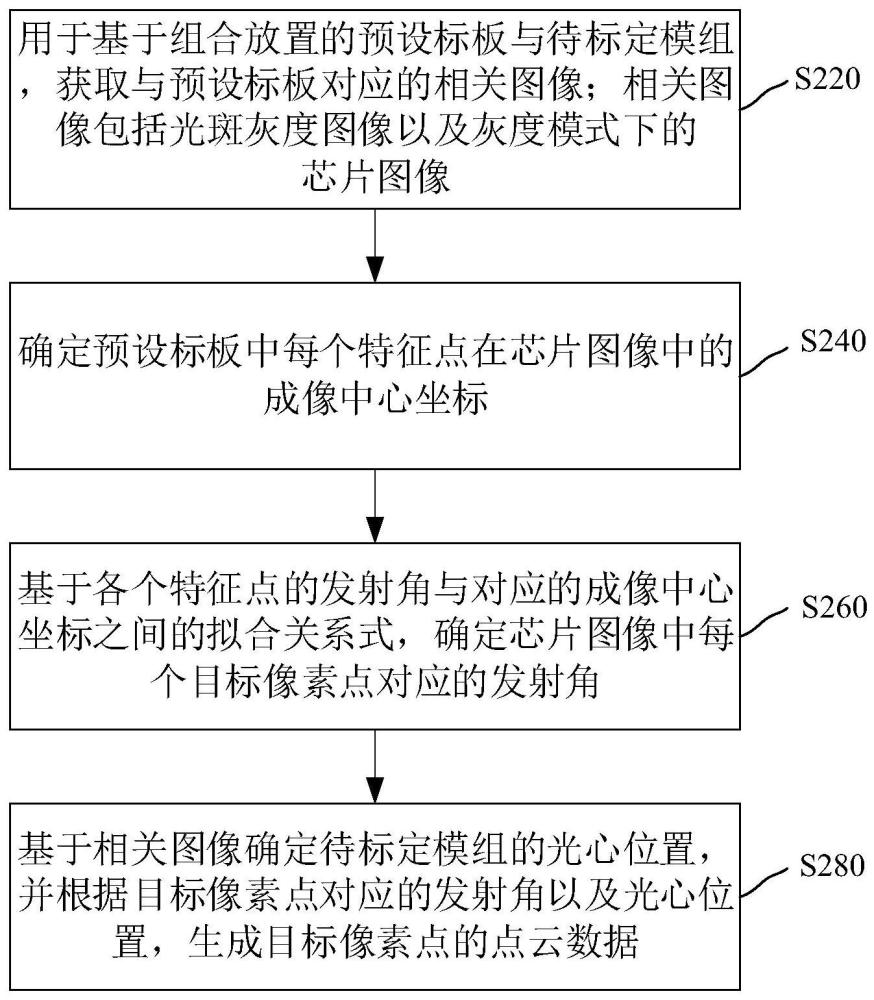
3、基于組合放置的預設標板與待標定模組,獲取與所述預設標板對應的相關圖像;所述相關圖像包括光斑灰度圖像以及灰度模式下的芯片圖像;
4、確定所述預設標板中每個特征點在所述芯片圖像中的成像中心坐標;
5、基于各個所述特征點的發射角與對應的所述成像中心坐標之間的擬合關系式,確定所述芯片圖像中每個目標像素點對應的發射角;
6、基于所述相關圖像確定所述待標定模組的光心位置,并根據所述目標像素點對應的發射角以及所述光心位置,生成所述目標像素點的點云數據。
7、在其中的一些實施例中,在所述基于組合放置的預設標板與待標定模組,獲取與所述預設標板對應的相關圖像之前,還包括:
8、判斷所述待標定模組的接收端視場角是否大于視場角閾值;
9、在所述待標定模組的接收端視場角大于所述視場角閾值時,將所述預設標板固定于所述待標定模組的側面;其中,所述預設標板中各個所述特征點的中心行與所述待標定模組的180度視場角平行。
10、在其中的一些實施例中,在所述判斷所述待標定模組的接收端視場角是否大于視場角閾值之后,還包括:
11、在所述待標定模組的接收端視場角小于或等于所述視場角閾值時,將所述預設標板固定于所述待標定模組的正上方;其中,所述預設標板的中心特征點與所述待標定模組的0度視場角重合。
12、在其中的一些實施例中,所述基于所述相關圖像確定所述待標定模組的光心位置,包括:
13、判斷所述光斑灰度圖像是否包含環形光斑;
14、在所述光斑灰度圖像包含所述環形光斑時,將所述光斑灰度圖像轉換為對應的二值化輪廓圖像;
15、確定所述二值化輪廓圖像中所述環形光斑的內輪廓和外輪廓;
16、通過圓擬合算法,分別對所述環形光斑的所述內輪廓和所述外輪廓進行處理,得到所述內輪廓對應的第一光心位置以及所述外輪廓對應的第二光心位置;
17、根據所述第一光心位置和所述第二光心位置,確定所述待標定模組的光心位置。
18、在其中的一些實施例中,在所述判斷所述光斑灰度圖像是否包含環形光斑之后,還包括:
19、在所述光斑灰度圖像不包含所述環形光斑時,確定所述預設標板的中心特征點在所述芯片圖像中的成像中心位置;
20、將所述中心特征點在所述芯片圖像中的成像中心位置作為所述待標定模組的光心位置。
21、在其中的一些實施例中,所述確定所述預設標板的中心特征點在所述芯片圖像中的成像中心位置,包括:
22、選取所述芯片圖像中像素亮度值大于亮度閾值的像素點;
23、將所述像素點的坐標與對應的所述像素亮度值進行加權運算,并根據運算結果,確定所述中心特征點在所述芯片圖像中的成像中心位置。
24、在其中的一些實施例中,所述基于各個所述特征點的發射角與對應的所述成像中心坐標之間的擬合關系式,確定所述芯片圖像中每個目標像素點對應的發射角,包括:
25、根據所述待標定模組的接收端視場角大小,確定所述預設標板中各個所述特征點的發射角;
26、通過曲面擬合算法,對各個所述特征點的發射角與對應的所述成像中心坐標進行處理,得到所述擬合關系式;
27、將所述芯片圖像中每個所述目標像素點的坐標輸入至所述擬合關系式,得到每個所述目標像素點對應的發射角。
28、第二個方面,在本實施例中提供了一種tof模組的標定裝置,所述裝置包括:獲取模塊、分析模塊、擬合模塊以及生成模塊;
29、所述獲取模塊,用于基于組合放置的預設標板與待標定模組,獲取與所述預設標板對應的相關圖像;所述相關圖像包括光斑灰度圖像和芯片圖像;
30、所述分析模塊,用于確定所述預設標板中每個特征點在所述芯片圖像中的成像中心坐標;
31、所述擬合模塊,用于基于各個所述特征點的發射角與對應的所述成像中心坐標之間的擬合關系式,確定所述芯片圖像中每個目標像素點對應的發射角;
32、所述生成模塊,用于基于所述相關圖像確定所述待標定模組的光心位置,并根據所述目標像素點對應的發射角以及所述光心位置,生成所述目標像素點的點云數據。
33、第三個方面,在本實施例中提供了一種計算機設備,包括存儲器、處理器以及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述處理器執行所述計算機程序時實現上述第一個方面所述的tof模組的標定方法。
34、第四個方面,在本實施例中提供了一種存儲介質,其上存儲有計算機程序,該程序被處理器執行時實現上述第一個方面所述的tof模組的標定方法。
35、與相關技術相比,在本實施例中提供的tof模組的標定方法、裝置、計算機設備和存儲介質,通過基于組合放置的預設標板與待標定模組,獲取與預設標板對應的相關圖像,該相關圖像包括光斑灰度圖像以及灰度模式下的芯片圖像;確定預設標板中每個特征點在芯片圖像中的成像中心坐標;進一步地,基于各個特征點的發射角與對應的成像中心坐標之間的擬合關系式,確定芯片圖像中每個目標像素點對應的發射角,并基于相關圖像確定待標定模組的光心位置,從而能夠根據目標像素點對應的發射角以及光心位置,生成目標像素點的點云數據,解決了在不標定模組內參數據的情況下,無法獲取模組像素坐標與發射角之間的對應關系的問題,實現了無需標定模組內參,即可獲取模組像素坐標與發射角之間的對應關系,以輸出最終的點云數據,同時降低設備成本。
36、本技術的一個或多個實施例的細節在以下附圖和描述中提出,以使本技術的其他特征、目的和優點更加簡明易懂。
- 還沒有人留言評論。精彩留言會獲得點贊!