建筑物分割結(jié)果智能矢量化的方法、裝置和電子設(shè)備與流程
本發(fā)明涉及深度學(xué)習(xí)結(jié)果后處理的,尤其是涉及一種建筑物分割結(jié)果智能矢量化的方法、裝置和電子設(shè)備。
背景技術(shù):
1、建筑物作為城市結(jié)構(gòu)的核心組成部分,其在城市規(guī)劃、城市管理以及城市應(yīng)急響應(yīng)等多個(gè)領(lǐng)域扮演著至關(guān)重要的角色。當(dāng)前,基于遙感影像的建筑物語義分割結(jié)果普遍采用柵格格式。相較于柵格圖,矢量圖形具有不失真的縮放特性,這一點(diǎn)對(duì)于地圖服務(wù)、城市規(guī)劃以及建筑設(shè)計(jì)等應(yīng)用場(chǎng)景至關(guān)重要,因?yàn)樗试S在不犧牲質(zhì)量的前提下對(duì)細(xì)節(jié)進(jìn)行無限放大。
2、傳統(tǒng)矢量化方法在處理建筑物分割結(jié)果時(shí),常常會(huì)出現(xiàn)鋸齒狀邊緣的問題,這使得它們并不適合用于建筑物分割結(jié)果的矢量化處理。同時(shí),針對(duì)建筑物矢量圖的規(guī)則化方法,目前主要局限于直角化、直角對(duì)角化以及多邊形擬合等技術(shù)。然而,在實(shí)際應(yīng)用中,這些方法往往難以對(duì)復(fù)雜建筑物的輪廓進(jìn)行精確和合理的矢量表示。
3、綜上,傳統(tǒng)的矢量化方法在處理建筑物分割結(jié)果時(shí),存在鋸齒狀邊緣問題,且對(duì)復(fù)雜建筑物分割結(jié)果進(jìn)行矢量化后,得到的矢量化結(jié)果會(huì)出現(xiàn)異常角度,準(zhǔn)確性差。
技術(shù)實(shí)現(xiàn)思路
1、有鑒于此,本發(fā)明的目的在于提供一種建筑物分割結(jié)果智能矢量化的方法、裝置和電子設(shè)備,以緩解現(xiàn)有的建筑物分割結(jié)果矢量化的方法得到的矢量化結(jié)果會(huì)出現(xiàn)異常角度,準(zhǔn)確性差的技術(shù)問題。
2、第一方面,本發(fā)明實(shí)施例提供了一種建筑物分割結(jié)果智能矢量化的方法,包括:
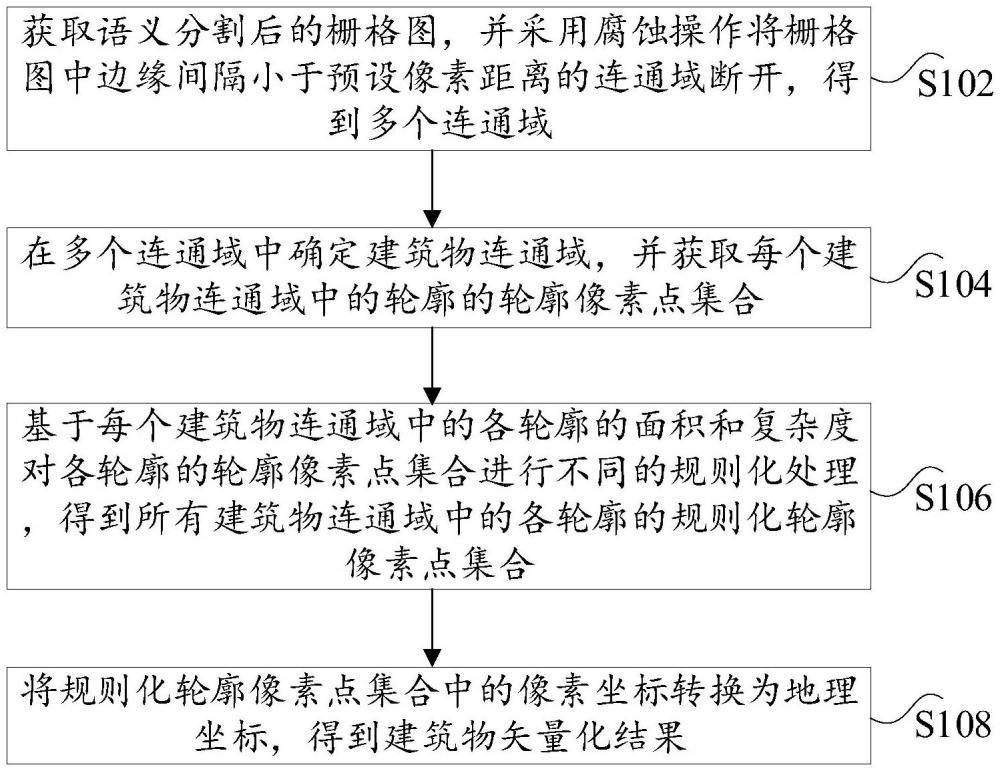
3、獲取語義分割后的柵格圖,并采用腐蝕操作將所述柵格圖中邊緣間隔小于預(yù)設(shè)像素距離的連通域斷開,得到多個(gè)連通域;
4、在多個(gè)所述連通域中確定建筑物連通域,并獲取每個(gè)所述建筑物連通域中的輪廓的輪廓像素點(diǎn)集合;
5、基于每個(gè)所述建筑物連通域中的各輪廓的面積和復(fù)雜度對(duì)各輪廓的輪廓像素點(diǎn)集合進(jìn)行不同的規(guī)則化處理,得到所有建筑物連通域中的各輪廓的規(guī)則化輪廓像素點(diǎn)集合;
6、將所述規(guī)則化輪廓像素點(diǎn)集合中的像素坐標(biāo)轉(zhuǎn)換為地理坐標(biāo),得到建筑物矢量化結(jié)果。
7、進(jìn)一步的,基于每個(gè)所述建筑物連通域中的各輪廓的面積和復(fù)雜度對(duì)各輪廓的輪廓像素點(diǎn)集合進(jìn)行不同的規(guī)則化處理,包括:
8、采用傳統(tǒng)輪廓簡(jiǎn)化算法對(duì)各輪廓的輪廓像素點(diǎn)集合中的輪廓像素點(diǎn)進(jìn)行簡(jiǎn)化,得到各輪廓的初始輪廓像素點(diǎn)集合;
9、根據(jù)各輪廓的初始輪廓像素點(diǎn)集合計(jì)算各輪廓的面積,并根據(jù)各輪廓的面積、預(yù)設(shè)面積閾值和各輪廓的初始輪廓像素點(diǎn)集合中的初始輪廓像素點(diǎn)個(gè)數(shù)確定各輪廓對(duì)應(yīng)的規(guī)則化策略,進(jìn)而按照所述規(guī)則化策略對(duì)對(duì)應(yīng)的輪廓的初始輪廓像素點(diǎn)集合進(jìn)行規(guī)則化處理,得到所有建筑物連通域中的各輪廓的規(guī)則化輪廓像素點(diǎn)集合。
10、進(jìn)一步的,根據(jù)各輪廓的面積、預(yù)設(shè)面積閾值和各輪廓的初始輪廓像素點(diǎn)集合中的初始輪廓像素點(diǎn)個(gè)數(shù)確定各輪廓對(duì)應(yīng)的規(guī)則化策略,進(jìn)而按照所述規(guī)則化策略對(duì)對(duì)應(yīng)的輪廓的初始輪廓像素點(diǎn)集合進(jìn)行規(guī)則化處理,包括:
11、若當(dāng)前輪廓的面積大于對(duì)應(yīng)的預(yù)設(shè)面積閾值,且當(dāng)前輪廓的初始輪廓像素點(diǎn)集合中的初始輪廓像素點(diǎn)個(gè)數(shù)大于第一預(yù)設(shè)個(gè)數(shù)閾值,則采用傳統(tǒng)輪廓簡(jiǎn)化算法對(duì)所述當(dāng)前輪廓的初始輪廓像素點(diǎn)集合中的初始輪廓像素點(diǎn)進(jìn)行簡(jiǎn)化,并采用自適應(yīng)規(guī)則化算法對(duì)簡(jiǎn)化得到的當(dāng)前輪廓的中間輪廓像素點(diǎn)集合進(jìn)行第一次規(guī)則化處理,得到當(dāng)前輪廓的一次規(guī)則化輪廓像素點(diǎn)集合;
12、若當(dāng)前輪廓的面積大于對(duì)應(yīng)的預(yù)設(shè)面積閾值,且當(dāng)前輪廓的初始輪廓像素點(diǎn)集合中的初始輪廓像素點(diǎn)個(gè)數(shù)不大于所述第一預(yù)設(shè)個(gè)數(shù)閾值,則采用自適應(yīng)規(guī)則化算法對(duì)當(dāng)前輪廓的初始輪廓像素點(diǎn)集合進(jìn)行第一次規(guī)則化處理,得到當(dāng)前輪廓的一次規(guī)則化輪廓像素點(diǎn)集合;
13、若所述當(dāng)前輪廓的一次規(guī)則化輪廓像素點(diǎn)集合中的一次規(guī)則化輪廓像素點(diǎn)個(gè)數(shù)小于第二預(yù)設(shè)個(gè)數(shù)閾值,則確定所述當(dāng)前輪廓的一次規(guī)則化輪廓像素點(diǎn)集合的最小外接矩形,并將所述當(dāng)前輪廓的一次規(guī)則化輪廓像素點(diǎn)集合的最小外接矩形的四個(gè)點(diǎn)作為當(dāng)前輪廓的規(guī)則化輪廓像素點(diǎn)集合;
14、若所述當(dāng)前輪廓的一次規(guī)則化輪廓像素點(diǎn)集合中的一次規(guī)則化輪廓像素點(diǎn)個(gè)數(shù)不小于所述第二預(yù)設(shè)個(gè)數(shù)閾值,且所述當(dāng)前輪廓的一次規(guī)則化輪廓像素點(diǎn)集合中的一次規(guī)則化輪廓像素點(diǎn)個(gè)數(shù)小于第三預(yù)設(shè)個(gè)數(shù)閾值,則采用自適應(yīng)規(guī)則化算法對(duì)所述當(dāng)前輪廓的一次規(guī)則化輪廓像素點(diǎn)集合進(jìn)行第二次規(guī)則化處理,得到當(dāng)前輪廓的規(guī)則化輪廓像素點(diǎn)集合;
15、若所述當(dāng)前輪廓的一次規(guī)則化輪廓像素點(diǎn)集合中的一次規(guī)則化輪廓像素點(diǎn)個(gè)數(shù)不小于所述第三預(yù)設(shè)個(gè)數(shù)閾值,則采用傳統(tǒng)輪廓簡(jiǎn)化算法對(duì)當(dāng)前輪廓的初始輪廓像素點(diǎn)集合中的初始輪廓像素點(diǎn)進(jìn)行簡(jiǎn)化,并將簡(jiǎn)化得到的當(dāng)前輪廓的中間輪廓像素點(diǎn)集合作為當(dāng)前輪廓的規(guī)則化輪廓像素點(diǎn)集合;
16、若當(dāng)前輪廓的面積不大于對(duì)應(yīng)的預(yù)設(shè)面積閾值,且所述當(dāng)前輪廓為外輪廓,則確定當(dāng)前輪廓的輪廓像素點(diǎn)集合的最小外接矩形,并將所述當(dāng)前輪廓的輪廓像素點(diǎn)集合的最小外接矩形的四個(gè)點(diǎn)作為當(dāng)前輪廓的規(guī)則化輪廓像素點(diǎn)集合;
17、若當(dāng)前輪廓的面積不大于對(duì)應(yīng)的預(yù)設(shè)面積閾值,且所述當(dāng)前輪廓為內(nèi)輪廓,則刪除當(dāng)前輪廓的輪廓像素點(diǎn)集合,進(jìn)而當(dāng)前輪廓的規(guī)則化輪廓像素點(diǎn)集合為空集。
18、進(jìn)一步的,采用自適應(yīng)規(guī)則化算法對(duì)目標(biāo)輪廓像素點(diǎn)集合進(jìn)行規(guī)則化處理的過程,包括:
19、將所述目標(biāo)輪廓像素點(diǎn)集合中相鄰的兩個(gè)輪廓像素點(diǎn)依次進(jìn)行連接,并根據(jù)第一預(yù)設(shè)距離閾值對(duì)連接得到的線段進(jìn)行篩選,得到初始線段集合,并計(jì)算所述初始線段集合中各初始線段的長(zhǎng)度和方向角,得到各初始線段的長(zhǎng)度集合和各初始線段的方向角集合,其中,所述目標(biāo)輪廓像素點(diǎn)集合包括:簡(jiǎn)化得到的當(dāng)前輪廓的中間輪廓像素點(diǎn)集合、當(dāng)前輪廓的初始輪廓像素點(diǎn)集合、所述當(dāng)前輪廓的一次規(guī)則化輪廓像素點(diǎn)集合;
20、將所述當(dāng)前輪廓的輪廓像素點(diǎn)集合的最小外接矩形的角度作為第一輪廓變換主方向,并將按照所述初始線段集合中各初始線段的順序進(jìn)行角度聚類后得到的最長(zhǎng)的一段擬合線段的方向角作為第二輪廓變換主方向;
21、若所述第一輪廓變換主方向與所述第二輪廓變換主方向相同,則根據(jù)所述第一輪廓變換主方向、各初始線段的長(zhǎng)度集合和各初始線段的方向角集合對(duì)所述初始線段集合中的初始線段進(jìn)行變換,得到第一變換后線段集合,進(jìn)而將所述第一變換后線段集合作為變換后線段集合;
22、若所述第一輪廓變換主方向與所述第二輪廓變換主方向不同,則根據(jù)所述第一輪廓變換主方向、各初始線段的長(zhǎng)度集合和各初始線段的方向角集合對(duì)所述初始線段集合中的初始線段進(jìn)行變換,得到第一變換后線段集合,并根據(jù)所述第二輪廓變換主方向、各初始線段的長(zhǎng)度集合和各初始線段的方向角集合對(duì)所述初始線段集合中的初始線段進(jìn)行變換,得到第二變換后線段集合,進(jìn)而將所述第一變換后線段集合和所述第二變換后線段集合作為變換后線段集合;
23、根據(jù)所述變換后線段集合中相鄰的兩條線段之間的關(guān)系確定目標(biāo)線段集合;
24、將所述目標(biāo)線段集合中目標(biāo)線段的起始點(diǎn)作為初始規(guī)則化處理的輪廓像素點(diǎn)集合;
25、根據(jù)所述初始規(guī)則化處理的輪廓像素點(diǎn)集合與所述當(dāng)前輪廓的輪廓像素點(diǎn)集合的交并比確定目標(biāo)規(guī)則化處理的輪廓像素點(diǎn)集合。
26、進(jìn)一步的,根據(jù)所述第一輪廓變換主方向、各初始線段的長(zhǎng)度集合和各初始線段的方向角集合對(duì)所述初始線段集合中的初始線段進(jìn)行變換,包括:
27、設(shè)定次方向?yàn)樗龅谝惠喞儞Q主方向;
28、計(jì)算所述初始線段集合中的第一條初始線段的方向角和所述第一輪廓變換主方向的第一角度差;
29、若所述第一角度差不大于第一預(yù)設(shè)角度閾值,則所述第一條初始線段以中心點(diǎn)進(jìn)行旋轉(zhuǎn),旋轉(zhuǎn)為平行于所述第一輪廓變換主方向的線段,得到所述第一條初始線段的變換后線段;
30、若所述第一角度差不大于第二預(yù)設(shè)角度閾值,則所述第一條初始線段以中心點(diǎn)進(jìn)行旋轉(zhuǎn),旋轉(zhuǎn)為垂直于所述第一輪廓變換主方向的線段,得到所述第一條初始線段的變換后線段;
31、若所述第一角度差大于所述第一預(yù)設(shè)角度閾值,或所述第一角度差大于所述第二預(yù)設(shè)角度閾值,且所述第一條初始線段的長(zhǎng)度不大于第二預(yù)設(shè)距離閾值,則過所述第一條初始線段的起始點(diǎn)做斜率為所述第一輪廓變換主方向的直線,并過所述第一條初始線段的終點(diǎn)做所述直線的垂線,進(jìn)而將垂足位置的兩條線段作為所述第一條初始線段的變換后線段;
32、若所述第一角度差大于所述第一預(yù)設(shè)角度閾值,或所述第一角度差大于所述第二預(yù)設(shè)角度閾值,且所述第一條初始線段的長(zhǎng)度大于所述第二預(yù)設(shè)距離閾值,則判斷所述次方向是否等于所述第一輪廓變換主方向;
33、若所述次方向等于所述第一輪廓變換主方向,則不對(duì)所述第一條初始線段進(jìn)行變換,且將所述次方向設(shè)定為所述第一條初始線段的方向角;
34、若所述次方向不等于所述第一輪廓變換主方向,則計(jì)算所述第一條初始線段的方向角和所述次方向的第二角度差;
35、若所述第二角度差不大于所述第一預(yù)設(shè)角度閾值,則所述第一條初始線段以中心點(diǎn)進(jìn)行旋轉(zhuǎn),旋轉(zhuǎn)為平行于所述次方向的線段,得到所述第一條初始線段的變換后線段;
36、若所述第二角度差不大于所述第二預(yù)設(shè)角度閾值,則所述第一條初始線段以中心點(diǎn)進(jìn)行旋轉(zhuǎn),旋轉(zhuǎn)為垂直于所述次方向的線段,得到所述第一條初始線段的變換后線段;
37、若所述第二角度差大于所述第一預(yù)設(shè)角度閾值,或所述第二角度差大于所述第二預(yù)設(shè)角度閾值,則不對(duì)所述第一條初始線段進(jìn)行變換,且將所述次方向設(shè)定為所述第一條初始線段的方向角;
38、遍歷所述初始線段集合中的下一條初始線段,并將所述下一條初始線段作為所述第一條初始線段,返回執(zhí)行計(jì)算所述初始線段集合中的第一條初始線段的方向角和所述第一輪廓變換主方向的第一角度差的步驟,直至遍歷完所述初始線段集合中的所有初始線段為止,得到所述第一變換后線段集合。
39、進(jìn)一步的,若所述變換后線段集合為所述第一變換后線段集合,根據(jù)所述變換后線段集合中相鄰的兩條線段之間的關(guān)系確定目標(biāo)線段集合,包括:
40、若所述第一變換后線段集合中相鄰的兩條線段平行,則計(jì)算所述相鄰的兩條線段之間的距離,其中,所述相鄰的兩條線段包括:索引序號(hào)相鄰的兩條線段、所述第一變換后線段集合中的最后一條線段和第一條線段;
41、若所述相鄰的兩條線段之間的距離不小于第二預(yù)設(shè)距離閾值,則計(jì)算所述相鄰的兩條線段中前一條線段的終點(diǎn)和后一條線段的起始點(diǎn)的中點(diǎn);
42、計(jì)算所述中點(diǎn)到所述前一條線段的第一投影點(diǎn),并計(jì)算所述中點(diǎn)到所述后一條線段的第二投影點(diǎn);
43、將所述前一條線段的終點(diǎn)更改為所述第一投影點(diǎn),并將所述后一條線段的起始點(diǎn)更改為所述第二投影點(diǎn);
44、將所述前一條線段的起始點(diǎn)和所述第一投影點(diǎn)構(gòu)成的線段、所述第一投影點(diǎn)和所述后一條線段的起始點(diǎn)構(gòu)成的線段作為目標(biāo)線段保存至所述目標(biāo)線段集合;
45、若所述相鄰的兩條線段之間的距離小于所述第二預(yù)設(shè)距離閾值,且所述相鄰的兩條線段的方向一致,則計(jì)算所述相鄰的兩條線段中后一條線段的終點(diǎn)在所述前一條線段上的第三投影點(diǎn);
46、將所述前一條線段的終點(diǎn)更改為所述第三投影點(diǎn),并將所述后一條線段的起始點(diǎn)更改為所述前一條線段的起始點(diǎn),所述后一條線段的終點(diǎn)更改為所述第三投影點(diǎn);
47、若所述相鄰的兩條線段之間的距離小于所述第二預(yù)設(shè)距離閾值,且所述相鄰的兩條線段的方向不一致,則計(jì)算所述相鄰的兩條線段中前一條線段的終點(diǎn)和后一條線段的起始點(diǎn)的中點(diǎn);
48、計(jì)算所述中點(diǎn)到所述前一條線段的第一投影點(diǎn),并計(jì)算所述中點(diǎn)到所述后一條線段的第二投影點(diǎn);
49、將所述前一條線段的終點(diǎn)更改為所述第一投影點(diǎn),并將所述后一條線段的起始點(diǎn)更改為所述第二投影點(diǎn);
50、將所述前一條線段的起始點(diǎn)和所述第一投影點(diǎn)構(gòu)成的線段、所述第一投影點(diǎn)和所述后一條線段的起始點(diǎn)構(gòu)成的線段作為目標(biāo)線段保存至所述目標(biāo)線段集合;
51、若所述第一變換后線段集合中相鄰的兩條線段相交,則計(jì)算所述相鄰的兩條線段的交點(diǎn);
52、將所述相鄰的兩條線段中前一條線段的終點(diǎn)更改為所述交點(diǎn),并將相鄰的兩條線段中后一條線段的起始點(diǎn)更改為所述交點(diǎn);
53、將所述前一條線段的起始點(diǎn)和所述交點(diǎn)構(gòu)成的線段作為目標(biāo)線段保存至所述目標(biāo)線段集合;
54、將所述目標(biāo)線段集合中的第一條目標(biāo)線段刪除,得到所述目標(biāo)線段集合。
55、進(jìn)一步的,所述初始規(guī)則化處理的輪廓像素點(diǎn)集合包括:第一初始規(guī)則化處理的輪廓像素點(diǎn)集合和第二初始規(guī)則化處理的輪廓像素點(diǎn)集合,所述第一初始規(guī)則化處理的輪廓像素點(diǎn)集合為根據(jù)所述第一變換后線段集合所對(duì)應(yīng)的目標(biāo)線段集合確定的初始規(guī)則化處理的輪廓像素點(diǎn)集合,所述第二初始規(guī)則化處理的輪廓像素點(diǎn)集合為根據(jù)所述第二變換后線段集合所對(duì)應(yīng)的目標(biāo)線段集合確定的初始規(guī)則化處理的輪廓像素點(diǎn)集合,根據(jù)所述初始規(guī)則化處理的輪廓像素點(diǎn)集合與所述當(dāng)前輪廓的輪廓像素點(diǎn)集合的交并比確定目標(biāo)規(guī)則化處理的輪廓像素點(diǎn)集合,包括:
56、計(jì)算所述第一初始規(guī)則化處理的輪廓像素點(diǎn)集合與所述當(dāng)前輪廓的輪廓像素點(diǎn)集合的第一交并比,并計(jì)算所述第二初始規(guī)則化處理的輪廓像素點(diǎn)集合與所述當(dāng)前輪廓的輪廓像素點(diǎn)集合的第二交并比;
57、若所述第一交并比不小于所述第二交并比,則將所述第一交并比作為所述目標(biāo)規(guī)則化處理的輪廓像素點(diǎn)集合;
58、若所述第一交并比小于所述第二交并比,則將所述第二交并比作為所述目標(biāo)規(guī)則化處理的輪廓像素點(diǎn)集合。
59、第二方面,本發(fā)明實(shí)施例還提供了一種建筑物分割結(jié)果智能矢量化的裝置,包括:
60、獲取和斷開單元,用于獲取語義分割后的柵格圖,并采用腐蝕操作將所述柵格圖中邊緣間隔小于預(yù)設(shè)像素距離的連通域斷開,得到多個(gè)連通域;
61、確定和獲取單元,用于在多個(gè)所述連通域中確定建筑物連通域,并獲取每個(gè)所述建筑物連通域中的輪廓的輪廓像素點(diǎn)集合;
62、規(guī)則化處理單元,用于基于每個(gè)所述建筑物連通域中的各輪廓的面積和復(fù)雜度對(duì)各輪廓的輪廓像素點(diǎn)集合進(jìn)行不同的規(guī)則化處理,得到所有建筑物連通域中的各輪廓的規(guī)則化輪廓像素點(diǎn)集合;
63、轉(zhuǎn)換單元,用于將所述規(guī)則化輪廓像素點(diǎn)集合中的像素坐標(biāo)轉(zhuǎn)換為地理坐標(biāo),得到建筑物矢量化結(jié)果。
64、第三方面,本發(fā)明實(shí)施例還提供了一種電子設(shè)備,包括存儲(chǔ)器、處理器及存儲(chǔ)在所述存儲(chǔ)器上并可在所述處理器上運(yùn)行的計(jì)算機(jī)程序,所述處理器執(zhí)行所述計(jì)算機(jī)程序時(shí)實(shí)現(xiàn)上述第一方面任一項(xiàng)所述的方法的步驟。
65、第四方面,本發(fā)明實(shí)施例還提供了一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),所述計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)存儲(chǔ)有機(jī)器可運(yùn)行指令,所述機(jī)器可運(yùn)行指令在被處理器調(diào)用和運(yùn)行時(shí),所述機(jī)器可運(yùn)行指令促使所述處理器運(yùn)行上述第一方面任一項(xiàng)所述的方法。
66、在本發(fā)明實(shí)施例中,提供了一種建筑物分割結(jié)果智能矢量化的方法,包括:獲取語義分割后的柵格圖,并采用腐蝕操作將柵格圖中邊緣間隔小于預(yù)設(shè)像素距離的連通域斷開,得到多個(gè)連通域;在多個(gè)連通域中確定建筑物連通域,并獲取每個(gè)建筑物連通域中的輪廓的輪廓像素點(diǎn)集合;基于每個(gè)建筑物連通域中的各輪廓的面積和復(fù)雜度對(duì)各輪廓的輪廓像素點(diǎn)集合進(jìn)行不同的規(guī)則化處理,得到所有建筑物連通域中的各輪廓的規(guī)則化輪廓像素點(diǎn)集合;將規(guī)則化輪廓像素點(diǎn)集合中的像素坐標(biāo)轉(zhuǎn)換為地理坐標(biāo),得到建筑物矢量化結(jié)果。通過上述描述可知,本發(fā)明的建筑物分割結(jié)果智能矢量化的方法中,會(huì)基于每個(gè)建筑物連通域中的各輪廓的面積和復(fù)雜度對(duì)各輪廓的輪廓像素點(diǎn)集合進(jìn)行不同的規(guī)則化處理,也就是說,對(duì)于不同的輪廓,采用不同的規(guī)則化處理策略對(duì)其對(duì)應(yīng)的輪廓像素點(diǎn)集合進(jìn)行規(guī)則化處理,針對(duì)性強(qiáng),更加符合每個(gè)輪廓特性,使得最終得到的各建筑物連通域中的各輪廓的規(guī)則化輪廓像素點(diǎn)集合更加科學(xué),顯著提升了建筑物邊界的提取精度,最終得到的建筑物矢量化結(jié)果更加準(zhǔn)確美觀,特別是在處理具有復(fù)雜結(jié)構(gòu)、非直角特征的建筑物矢量化及規(guī)則化任務(wù)時(shí),展現(xiàn)出了顯著的競(jìng)爭(zhēng)優(yōu)勢(shì)和實(shí)用價(jià)值,緩解了傳統(tǒng)的建筑物分割結(jié)果矢量化的方法得到的矢量化結(jié)果會(huì)出現(xiàn)異常角度,準(zhǔn)確性差的技術(shù)問題。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!