聯(lián)排閘機(jī)的檢測區(qū)域確定方法和裝置與流程
本技術(shù)屬于聯(lián)排閘機(jī),尤其涉及一種聯(lián)排閘機(jī)的檢測區(qū)域確定方法和裝置。
背景技術(shù):
1、在行人過閘場景中,利用計(jì)算機(jī)視覺技術(shù)確定多個閘機(jī)中需要開啟的閘機(jī),而閘機(jī)定位是計(jì)算機(jī)視覺技術(shù)的前提。相關(guān)技術(shù)中,主要通過人工標(biāo)定的方法對閘機(jī)進(jìn)行定位。但是,上述方法不適用于大批量部署場景,人工工作量大,人工成本高。
技術(shù)實(shí)現(xiàn)思路
1、本技術(shù)旨在至少解決相關(guān)技術(shù)中存在的技術(shù)問題之一。為此,本技術(shù)提出一種聯(lián)排閘機(jī)的檢測區(qū)域確定方法和裝置,無需人工手動標(biāo)定,降低人工工作量,適用于大批量部署場景,提高標(biāo)定效率,降低人工成本。
2、第一方面,本技術(shù)提供了一種聯(lián)排閘機(jī)的檢測區(qū)域確定方法,所述聯(lián)排閘機(jī)包括順序排列的多個子閘機(jī),相鄰的所述子閘機(jī)之間的上方區(qū)域?qū)?yīng)設(shè)置有圖像傳感器;該方法包括:
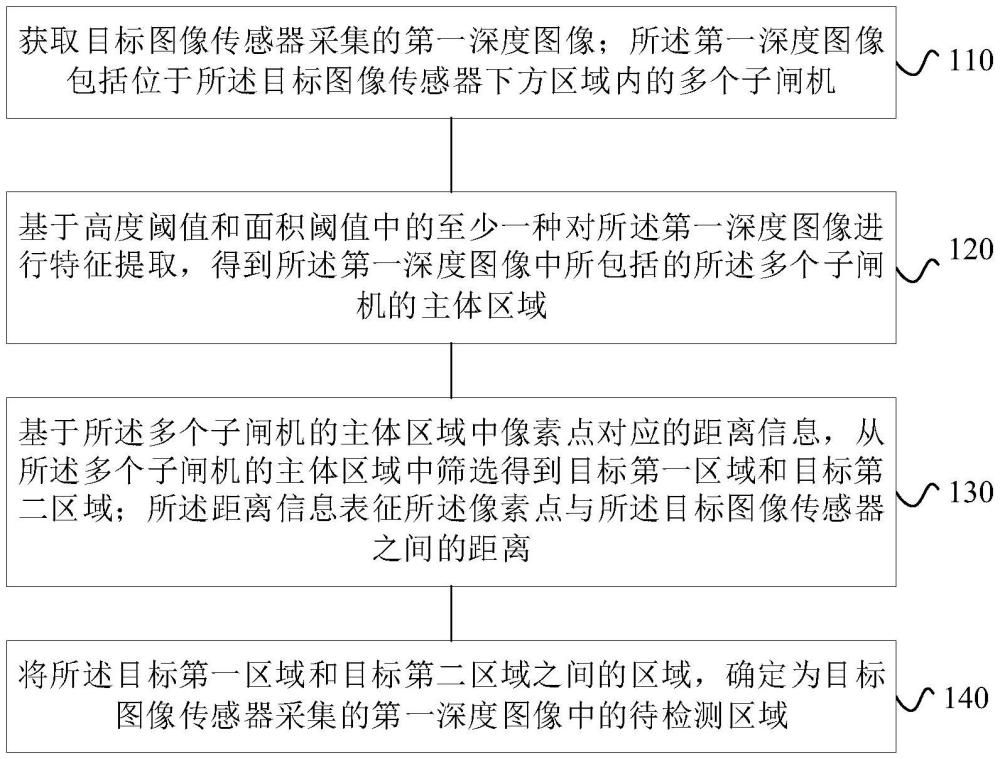
3、獲取目標(biāo)圖像傳感器采集的第一深度圖像;所述第一深度圖像包括位于所述目標(biāo)圖像傳感器下方區(qū)域內(nèi)的多個子閘機(jī);
4、基于高度閾值和面積閾值中的至少一種對所述第一深度圖像進(jìn)行特征提取,得到所述第一深度圖像中所包括的所述多個子閘機(jī)的主體區(qū)域;
5、基于所述多個子閘機(jī)的主體區(qū)域中像素點(diǎn)對應(yīng)的距離信息,從所述多個子閘機(jī)的主體區(qū)域中篩選得到目標(biāo)第一區(qū)域和目標(biāo)第二區(qū)域;所述距離信息表征所述像素點(diǎn)對應(yīng)的物體與所述目標(biāo)圖像傳感器之間的距離;
6、將所述目標(biāo)第一區(qū)域和目標(biāo)第二區(qū)域之間的區(qū)域,確定為目標(biāo)圖像傳感器采集的第一深度圖像中的待檢測區(qū)域。
7、根據(jù)本技術(shù)的聯(lián)排閘機(jī)的檢測區(qū)域確定方法,通過目標(biāo)圖像傳感器采集第一深度圖像,并通過高度閾值和面積閾值中的一個或多個對第一深度圖像進(jìn)行特征提取,得到第一深度圖像中包括的多個子閘機(jī)的主體區(qū)域,從多個子閘機(jī)的主體區(qū)域中自動確定目標(biāo)圖像傳感器采集的第一深度圖像中的待檢測區(qū)域,無需人工手動標(biāo)定,降低人工工作量,適用于大批量部署場景,提高標(biāo)定效率,降低人工成本。
8、根據(jù)本技術(shù)的聯(lián)排閘機(jī)的檢測區(qū)域確定方法,所述基于所述多個子閘機(jī)的主體區(qū)域中像素點(diǎn)對應(yīng)的距離信息,從所述多個子閘機(jī)的主體區(qū)域中篩選得到目標(biāo)第一區(qū)域和目標(biāo)第二區(qū)域,包括:
9、比較所述多個子閘機(jī)的主體區(qū)域中像素點(diǎn)對應(yīng)的距離信息;
10、將所述多個子閘機(jī)的主體區(qū)域中所述像素點(diǎn)對應(yīng)的距離信息中所述距離信息最小的兩個主體區(qū)域,確定為所述目標(biāo)第一區(qū)域和所述目標(biāo)第二區(qū)域。
11、根據(jù)本技術(shù)的聯(lián)排閘機(jī)的檢測區(qū)域確定方法,所述將所述多個子閘機(jī)的主體區(qū)域中所述像素點(diǎn)對應(yīng)的距離信息中所述距離信息最小的兩個主體區(qū)域,確定為所述目標(biāo)第一區(qū)域和所述目標(biāo)第二區(qū)域,包括:
12、將所述多個子閘機(jī)的主體區(qū)域中所述像素點(diǎn)對應(yīng)的距離信息中所述距離信息最小的兩個主體區(qū)域,確定為初始第一區(qū)域和初始第二區(qū)域;
13、分別對所述初始第一區(qū)域和所述初始第二區(qū)域中連通密度小于密度閾值的區(qū)域進(jìn)行裁剪,得到裁剪后的初始第一區(qū)域和裁剪后的初始第二區(qū)域;
14、將所述裁剪后的初始第一區(qū)域和所述裁剪后的初始第二區(qū)域,確定為所述目標(biāo)第一區(qū)域和所述目標(biāo)第二區(qū)域。
15、根據(jù)本技術(shù)的聯(lián)排閘機(jī)的檢測區(qū)域確定方法,所述將所述裁剪后的初始第一區(qū)域和所述裁剪后的初始第二區(qū)域,確定為所述目標(biāo)第一區(qū)域和所述目標(biāo)第二區(qū)域,包括:
16、基于所述裁剪后的初始第一區(qū)域和所述裁剪后的初始第二區(qū)域內(nèi)包括的閘機(jī)主體對應(yīng)的相對位置信息和尺寸信息中的至少一種,對齊所述裁剪后的初始第一區(qū)域和所述裁剪后的初始第二區(qū)域,得到對齊第一區(qū)域和對齊第二區(qū)域;
17、將所述對齊第一區(qū)域和所述對齊第二區(qū)域,確定為所述目標(biāo)第一區(qū)域和所述目標(biāo)第二區(qū)域。
18、根據(jù)本技術(shù)的聯(lián)排閘機(jī)的檢測區(qū)域確定方法,所述基于高度閾值和面積閾值中的至少一種對所述第一深度圖像進(jìn)行特征提取,得到所述第一深度圖像中所包括的所述多個子閘機(jī)的主體區(qū)域,包括:
19、從所述第一深度圖像中截取所述像素點(diǎn)對應(yīng)的距離信息大于所述高度閾值的像素區(qū)域,得到所述第一深度圖像中所包括的所述多個子閘機(jī)的主體區(qū)域;
20、和/或;
21、從所述第一深度圖像中截取連通像素區(qū)域大于所述面積閾值的像素區(qū)域,得到所述第一深度圖像中所包括的所述多個子閘機(jī)的主體區(qū)域;所述連通像素區(qū)域?yàn)榫哂邢嗤卣鞯南袼攸c(diǎn)包括的區(qū)域。
22、根據(jù)本技術(shù)的聯(lián)排閘機(jī)的檢測區(qū)域確定方法,所述獲取目標(biāo)圖像傳感器采集的第一深度圖像,包括:
23、獲取所述目標(biāo)圖像傳感器采集的初始深度圖像;
24、對所述初始深度圖像進(jìn)行濾波處理和二值化處理中的至少一種,得到所述第一深度圖像。
25、根據(jù)本技術(shù)的聯(lián)排閘機(jī)的檢測區(qū)域確定方法,在所述將所述目標(biāo)第一區(qū)域和目標(biāo)第二區(qū)域之間的區(qū)域,確定為目標(biāo)圖像傳感器采集的第一深度圖像中的待檢測區(qū)域之后,所述方法還包括:
26、對所述待檢測區(qū)域進(jìn)行特征識別,得到特征識別結(jié)果;
27、在所述特征識別結(jié)果為存在過閘對象的情況下,將所述待檢測區(qū)域確定為開啟區(qū)域;
28、在所述特征識別結(jié)果為不存在過閘對象的情況下,將所述待檢測區(qū)域確定為無需開啟區(qū)域。
29、第二方面,本技術(shù)提供了一種聯(lián)排閘機(jī)的檢測區(qū)域確定裝置,所述聯(lián)排閘機(jī)包括順序排列的多個子閘機(jī),相鄰的所述子閘機(jī)之間的上方區(qū)域?qū)?yīng)設(shè)置有圖像傳感器;該裝置包括:
30、第一處理模塊,用于獲取目標(biāo)圖像傳感器采集的第一深度圖像;所述第一深度圖像包括位于所述目標(biāo)圖像傳感器下方區(qū)域內(nèi)的多個子閘機(jī);
31、第二處理模塊,用于基于高度閾值和面積閾值中的至少一種對所述第一深度圖像進(jìn)行特征提取,得到所述第一深度圖像中所包括的所述多個子閘機(jī)的主體區(qū)域;
32、第三處理模塊,用于基于所述多個子閘機(jī)的主體區(qū)域中像素點(diǎn)對應(yīng)的距離信息,從所述多個子閘機(jī)的主體區(qū)域中篩選得到目標(biāo)第一區(qū)域和目標(biāo)第二區(qū)域;所述距離信息表征所述像素點(diǎn)對應(yīng)的物體與所述目標(biāo)圖像傳感器之間的距離;
33、第四處理模塊,用于將所述目標(biāo)第一區(qū)域和目標(biāo)第二區(qū)域之間的區(qū)域,確定為目標(biāo)圖像傳感器采集的第一深度圖像中的待檢測區(qū)域。
34、根據(jù)本技術(shù)的聯(lián)排閘機(jī)的檢測區(qū)域確定裝置,通過目標(biāo)圖像傳感器采集第一深度圖像,并通過高度閾值和面積閾值中的一個或多個對第一深度圖像進(jìn)行特征提取,得到第一深度圖像中包括的多個子閘機(jī)的主體區(qū)域,從多個子閘機(jī)的主體區(qū)域中自動確定目標(biāo)圖像傳感器采集的第一深度圖像中的待檢測區(qū)域,無需人工手動標(biāo)定,降低人工工作量,適用于大批量部署場景,提高標(biāo)定效率,降低人工成本。
35、第三方面,本技術(shù)提供了一種電子設(shè)備,包括存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運(yùn)行的計(jì)算機(jī)程序,所述處理器執(zhí)行所述計(jì)算機(jī)程序時實(shí)現(xiàn)如上述第一方面所述的聯(lián)排閘機(jī)的檢測區(qū)域確定方法。
36、第四方面,本技術(shù)提供了一種非暫態(tài)計(jì)算機(jī)可讀存儲介質(zhì),其上存儲有計(jì)算機(jī)程序,所述計(jì)算機(jī)程序被處理器執(zhí)行時實(shí)現(xiàn)如上述第一方面所述的聯(lián)排閘機(jī)的檢測區(qū)域確定方法。
37、第五方面,本技術(shù)提供了一種計(jì)算機(jī)程序產(chǎn)品,包括計(jì)算機(jī)程序,所述計(jì)算機(jī)程序被處理器執(zhí)行時實(shí)現(xiàn)如上述第一方面所述的聯(lián)排閘機(jī)的檢測區(qū)域確定方法。
38、本技術(shù)實(shí)施例中的上述一個或多個技術(shù)方案,至少具有如下技術(shù)效果之一:
39、通過目標(biāo)圖像傳感器采集第一深度圖像,并通過高度閾值和面積閾值中的一個或多個對第一深度圖像進(jìn)行特征提取,得到第一深度圖像中包括的多個子閘機(jī)的主體區(qū)域,從多個子閘機(jī)的主體區(qū)域中自動確定目標(biāo)圖像傳感器采集的第一深度圖像中的待檢測區(qū)域,無需人工手動標(biāo)定,降低人工工作量,適用于大批量部署場景,提高標(biāo)定效率,降低人工成本。
40、進(jìn)一步地,通過對初始深度圖像進(jìn)行濾波處理,能夠去除初始深度圖像中的噪聲,得到更加平滑的第一深度圖像,提高第一深度圖像的圖像質(zhì)量,通過對初始深度圖像進(jìn)行二值化處理,能夠增強(qiáng)得到的第一深度圖像的對比度,使得第一深度圖像中包括的多個子閘機(jī)更加清晰,提高后續(xù)確定待檢測區(qū)域的效率。
41、更進(jìn)一步地,通過分別對初始第一區(qū)域和初始第二區(qū)域中連通密度小于密度閾值的區(qū)域進(jìn)行裁剪,可以得到連通更密集的像素區(qū)域,使得得到的目標(biāo)第一區(qū)域和目標(biāo)第二區(qū)域更貼合子閘機(jī)的實(shí)際形態(tài),減少子閘機(jī)的門體對閘機(jī)定位的干擾,提高后續(xù)定位準(zhǔn)確度。
42、再進(jìn)一步地,通過裁剪后的初始第一區(qū)域和裁剪后的初始第二區(qū)域內(nèi)包括的閘機(jī)主體對應(yīng)的相對位置信息和尺寸信息中的一個或多個,有效對齊裁剪后的初始第一區(qū)域和裁剪后的初始第二區(qū)域,得到對齊第一區(qū)域和對齊第二區(qū)域,去除裁剪后的初始第一區(qū)域和裁剪后的初始第二區(qū)域中的干擾物,提高獲取的目標(biāo)第一區(qū)域和目標(biāo)第二區(qū)域的準(zhǔn)確度。
43、本技術(shù)的附加方面和優(yōu)點(diǎn)將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本技術(shù)的實(shí)踐了解到。
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!