基于優(yōu)化麻雀搜索算法和支持向量機的微地形識別方法
本申請屬于機器人控制,尤其涉及一種基于優(yōu)化麻雀搜索算法和支持向量機的微地形識別方法。
背景技術(shù):
1、近年來,腿式機器人地形分類的話題備受關(guān)注,并提出了針對各種地形的識別方法。其中,常用的基于視覺的地形識別方法將視覺傳感器應(yīng)用于腿部機器人系統(tǒng)的室內(nèi)外地形分類中,但是該方法存在以下缺陷:受環(huán)境光的影響嚴(yán)重,即由于夜間光線不充足從而無法從圖像中捕捉地形的紋理,或者,由于地形光線的差異從而導(dǎo)致實現(xiàn)效果不佳。
2、基于此,提出了基于振動的地形分類,該方法引入了未經(jīng)處理的加速度數(shù)據(jù),共計算了8個特征,具體的,采用8個力傳感器獲取用于地形分類的接觸力數(shù)據(jù)集,然后通過算法對獲取到的信息進(jìn)行識別分類,從而幫助機器人完成地形識別的任務(wù)。現(xiàn)有的基于振動的地形分類方法包括:將力傳感器安裝在機器人腳下,并采用多類k-最近鄰分類器實現(xiàn)了較高精度的地形分類,此外,隨機森林(rf)、概率神經(jīng)網(wǎng)絡(luò)(pnn)和支持向量機(svm)等算法也被廣泛用于地形識別中。
3、針對六足機器人,其在復(fù)雜斜坡的運動過程中,當(dāng)遇到障礙物和凸起時容易出現(xiàn)碰撞和翻倒的情況,因此,亟待一種解決辦法以使其能夠穩(wěn)定地避開障礙物和通過凸起地形。
技術(shù)實現(xiàn)思路
1、有鑒于此,本申請的目的在于提供一種基于優(yōu)化麻雀搜索算法和支持向量機的微地形識別方法,通過六足機器人搭載的足端壓力傳感器進(jìn)行微地形數(shù)據(jù)采集,通過對麻雀搜索算法進(jìn)行優(yōu)化,以更新支持向量機的參數(shù),從而得到微地形識別模型,利用微地形識別模型對六足機器人的運動數(shù)據(jù)進(jìn)行識別。
2、本申請?zhí)峁┝艘环N基于優(yōu)化麻雀搜索算法和支持向量機的微地形識別方法,包括:
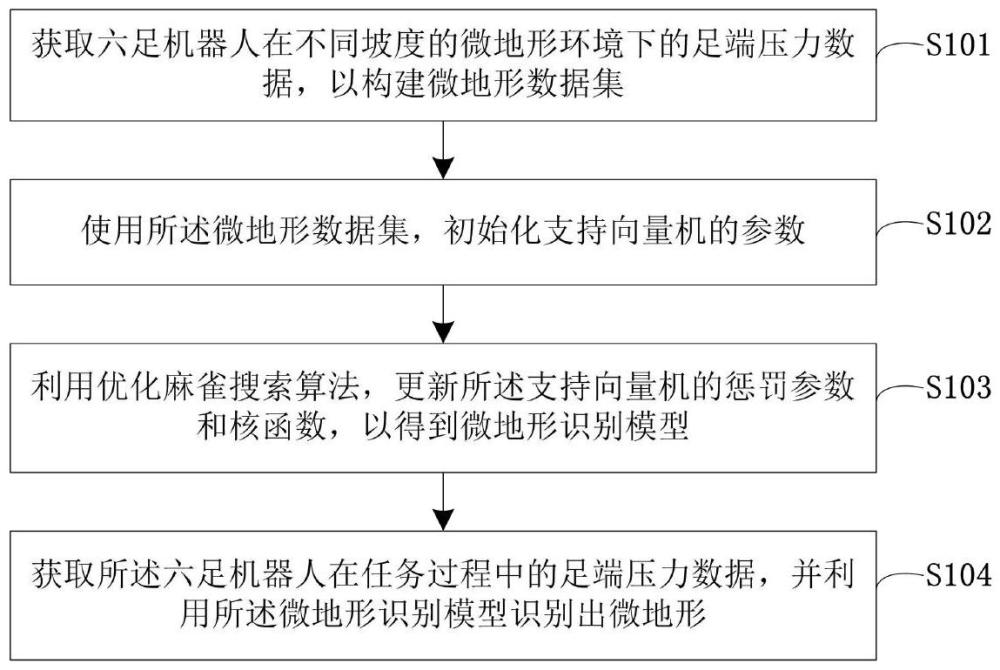
3、s1、獲取六足機器人在不同坡度的微地形環(huán)境下的足端壓力數(shù)據(jù),以構(gòu)建微地形數(shù)據(jù)集;其中,所述六足機器人以四足步態(tài)進(jìn)行控制;
4、s2、使用所述微地形數(shù)據(jù)集,初始化支持向量機的參數(shù);
5、s3、利用優(yōu)化麻雀搜索算法,更新所述支持向量機的懲罰參數(shù)和核函數(shù),以得到微地形識別模型;
6、s4、獲取所述六足機器人在任務(wù)過程中的足端壓力數(shù)據(jù),并利用所述微地形識別模型識別出微地形。
7、進(jìn)一步的,所述六足機器人的腿部結(jié)構(gòu)被分為三組以進(jìn)行分別控制,其中,右前腿和左中腿為第一組,左前腿和右中腿為第二組,左后腿和右后腿為第三組;
8、所述四足步態(tài)的控制規(guī)劃如下:
9、順序驅(qū)動所述第一組、第二組、第三組腿部結(jié)構(gòu)交替完成支撐和擺動狀態(tài)。
10、進(jìn)一步的,所述微地形包括:高度為1cm的凸起和深度為1cm的凹陷;所述坡度的上限為15°。
11、進(jìn)一步的,所述六足機器人的各動作的運動時間設(shè)置如下:抬起動作為200ms、前旋和后旋動作為200ms、下落動作為200ms,并且上述各動作完成后延遲時間為100ms。
12、進(jìn)一步的,所述獲取六足機器人在不同坡度的微地形環(huán)境下的足端壓力數(shù)據(jù),以構(gòu)建微地形數(shù)據(jù)集,包括:
13、使所述六足機器人在不同坡度下反復(fù)通過微地形環(huán)境,并利用足端壓力傳感器采集包含所述六足機器人的每只腳下落在凸起和凹陷時的足端壓力數(shù)據(jù);其中,所述足端壓力傳感器的采樣時間為100ms;
14、將連續(xù)三次采集的足端壓力數(shù)據(jù)作為1組,從足端壓力數(shù)據(jù)中隨機抽取出200組數(shù)據(jù),并對該200組數(shù)據(jù)進(jìn)行歸一化處理,以得到微地形數(shù)據(jù)集。
15、進(jìn)一步的,所述利用優(yōu)化麻雀搜索算法,更新所述支持向量機的懲罰參數(shù)和核函數(shù),包括:
16、將所述支持向量機的懲罰參數(shù)和核函數(shù)的取值映射為麻雀種群的位置;
17、將求解所述優(yōu)化麻雀搜索算法的全局最優(yōu)位置的過程視作所述支持向量機的懲罰參數(shù)和核函數(shù)的更新過程。
18、進(jìn)一步的,通過以下方式求解所述優(yōu)化麻雀搜索算法的全局最優(yōu)位置:
19、s3a、計算當(dāng)前麻雀種群中麻雀個體的第一適應(yīng)度;
20、s3b、計算預(yù)警值,以更新發(fā)現(xiàn)者、跟隨者和警戒者的位置,得到新的麻雀種群;
21、s3c、計算新的麻雀種群的動態(tài)擾動概率,以對新的麻雀種群進(jìn)行擾動;
22、s3d、計算擾動后的麻雀種群中麻雀個體的第二適應(yīng)度;
23、s3e、根據(jù)所述第一適應(yīng)度和第二適應(yīng)度,按照貪婪更新策略再一次更新麻雀種群,直至達(dá)到最大迭代次數(shù),以輸出全局最優(yōu)位置。
24、進(jìn)一步的,在利用優(yōu)化麻雀搜索算法,更新所述支持向量機的懲罰參數(shù)和核函數(shù)之前,所述方法還包括:
25、利用佳點集初始化麻雀種群,具體步驟如下:
26、a、設(shè)置種群數(shù)量為m,維度為n,通過以下公式計算r值:
27、
28、式中,r=(r1,r2,r3,......rn),mi表示第i個個體;
29、b、構(gòu)造數(shù)量為m的佳點集:
30、pn(i)={(r1i1,r2i2,r3i3,......,rnin)},i=1,2,3,......n;
31、c、將pn映射到麻雀種群所在的定義域上:
32、
33、式中,aj為當(dāng)前維度的下限,bj為當(dāng)前維度的上限。
34、本申請?zhí)峁┑幕趦?yōu)化麻雀搜索算法和支持向量機的微地形識別方法,首先,通過六足機器人搭載的足端壓力傳感器進(jìn)行微地形數(shù)據(jù)采集。然后,通過對麻雀搜索算法進(jìn)行優(yōu)化,以更新支持向量機的參數(shù),從而得到微地形識別模型,具體的優(yōu)化方法包括:1)利用佳點集初始化麻雀種群,以增加麻雀種群的多樣性;2)通過在發(fā)現(xiàn)者位置更新公式中引入了一種由冪函數(shù)和三角函數(shù)組成的自適應(yīng)非線性慣性遞減權(quán)重,在保證收斂速度的同時,增強了全局搜索能力;3)加入了動態(tài)擾動概率和貪婪更新策略,增強了算法的全局搜索能力。最后,利用微地形識別模型對六足機器人的運動數(shù)據(jù)進(jìn)行識別。
技術(shù)特征:
1.一種基于優(yōu)化麻雀搜索算法和支持向量機的微地形識別方法,其特征在于,所述方法,包括:
2.如權(quán)利要求1所述的方法,其特征在于,所述六足機器人的腿部結(jié)構(gòu)被分為三組以進(jìn)行分別控制,其中,右前腿和左中腿為第一組,左前腿和右中腿為第二組,左后腿和右后腿為第三組;
3.如權(quán)利要求1所述的方法,其特征在于,所述微地形包括:高度為1cm的凸起和深度為1cm的凹陷;所述坡度的上限為15°。
4.如權(quán)利要求1所述的方法,其特征在于,所述六足機器人的各動作的運動時間設(shè)置如下:抬起動作為200ms、前旋和后旋動作為200ms、下落動作為200ms,并且上述各動作完成后延遲時間為100ms。
5.如權(quán)利要求1所述的方法,其特征在于,所述獲取六足機器人在不同坡度的微地形環(huán)境下的足端壓力數(shù)據(jù),以構(gòu)建微地形數(shù)據(jù)集,包括:
6.如權(quán)利要求1所述的方法,其特征在于,所述利用優(yōu)化麻雀搜索算法,更新所述支持向量機的懲罰參數(shù)和核函數(shù),包括:
7.如權(quán)利要求6所述的方法,其特征在于,通過以下方式求解所述優(yōu)化麻雀搜索算法的全局最優(yōu)位置:
8.如權(quán)利要求1所述的方法,其特征在于,在利用優(yōu)化麻雀搜索算法,更新所述支持向量機的懲罰參數(shù)和核函數(shù)之前,所述方法還包括:
技術(shù)總結(jié)
本申請?zhí)峁┝艘环N基于優(yōu)化麻雀搜索算法和支持向量機的微地形識別方法,包括:S1、獲取六足機器人在不同坡度的微地形環(huán)境下的足端壓力數(shù)據(jù),以構(gòu)建微地形數(shù)據(jù)集;其中,所述六足機器人以四足步態(tài)進(jìn)行控制;S2、使用所述微地形數(shù)據(jù)集,初始化支持向量機的參數(shù);S3、利用優(yōu)化麻雀搜索算法,更新所述支持向量機的懲罰參數(shù)和核函數(shù),以得到微地形識別模型;S4、獲取所述六足機器人在任務(wù)過程中的足端壓力數(shù)據(jù),并利用所述微地形識別模型識別出微地形。該方法通過六足機器人進(jìn)行微地形數(shù)據(jù)采集,并利用優(yōu)化麻雀搜索算法,即通過增加麻雀種群的多樣性和全局搜索能力,更新支持向量機的參數(shù),從而提高微地形識別模型的準(zhǔn)確性、效率和穩(wěn)定性。
技術(shù)研發(fā)人員:杜巧玲,畢振龍,王姝惠
受保護(hù)的技術(shù)使用者:吉林大學(xué)
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!