一種基于神經(jīng)網(wǎng)絡(luò)的高斯?jié)姙R單目重建方法
本發(fā)明屬于計(jì)算機(jī)視覺(jué),具體涉及一種基于神經(jīng)網(wǎng)絡(luò)的高斯?jié)姙R單目重建方法。
背景技術(shù):
1、隨著機(jī)器學(xué)習(xí)的飛速發(fā)展,高精度三維表面重建技術(shù)在各個(gè)領(lǐng)域的應(yīng)用越來(lái)越廣泛,如逆向工程、數(shù)字建模、醫(yī)療診斷、虛擬現(xiàn)實(shí)等。該技術(shù)能夠通過(guò)對(duì)物體幾何形狀的重塑和建模,提供更準(zhǔn)確、更直觀的圖形表達(dá)。在人工智能大行其道的時(shí)代,三維重建的技術(shù)水平對(duì)計(jì)算機(jī)科技的發(fā)展至關(guān)重要。
2、文獻(xiàn)“r.hartley?and?a.zisserman,‘multiple?view?geometry?in?computervision,’2nd?ed.cambridge:cambridge?university?press,2004.”提出了一種三維重建方法,從幾何上理解和分析從三維到二維的投影過(guò)程,設(shè)計(jì)了從二維到三維的逆問(wèn)題解決方案,但現(xiàn)有的三維重建通常需要大量已知相機(jī)參數(shù)的圖像,并進(jìn)行相機(jī)參數(shù)估計(jì)、密集點(diǎn)云重建和表面重建等多個(gè)步驟,對(duì)算力的要求是十分巨大的。相比之下,基于深度學(xué)習(xí)的算法具有顯著的精簡(jiǎn)算力的優(yōu)勢(shì)。在神經(jīng)網(wǎng)絡(luò)中,處理由圖片提取的數(shù)據(jù)變成了編碼與解碼的過(guò)程,隨著特征點(diǎn)選取的增加,無(wú)需復(fù)雜的相機(jī)校準(zhǔn)的情況下,就可以從單張或多張二維圖像中重建物體的三維模型。目前,主流的三維重建形式一共有三種:基于點(diǎn)云的三維重建,基于體素的三維重建以及基于網(wǎng)格的三維重建。其中,點(diǎn)云重建方式nerf的問(wèn)世讓神經(jīng)輻射場(chǎng)成為主流,但其因?yàn)槭褂蒙窠?jīng)網(wǎng)絡(luò)進(jìn)行稠密重建,對(duì)gpu算力的要求仍然很高。
3、雖然通過(guò)幾何和深度學(xué)習(xí)從現(xiàn)有圖像中恢復(fù)布局的工作進(jìn)展迅速,但利用全景圖像應(yīng)對(duì)這些挑戰(zhàn)的工作仍然很少。全景相機(jī)具有提高任務(wù)性能的潛力:其360°的視場(chǎng)可捕捉其光學(xué)中心周?chē)恼麄€(gè)視場(chǎng),可一次性獲取大量的信息,從而更好地復(fù)原布局。
技術(shù)實(shí)現(xiàn)思路
1、為解決上述技術(shù)問(wèn)題,本發(fā)明提供了一種基于神經(jīng)網(wǎng)絡(luò)的高斯?jié)姙R單目重建方法,從工程應(yīng)用角度出發(fā),將三維高斯與單目重建技術(shù)結(jié)合,并使用全景圖片拍攝與球狀卷積核圖片深度恢復(fù)技術(shù),減少了以往三維重建技術(shù)的所需圖片數(shù),極大地加快了三維重建的速度,具有重要的應(yīng)用價(jià)值。
2、本發(fā)明采用的技術(shù)方案為:一種基于神經(jīng)網(wǎng)絡(luò)的高斯?jié)姙R單目重建方法,具體步驟如下:
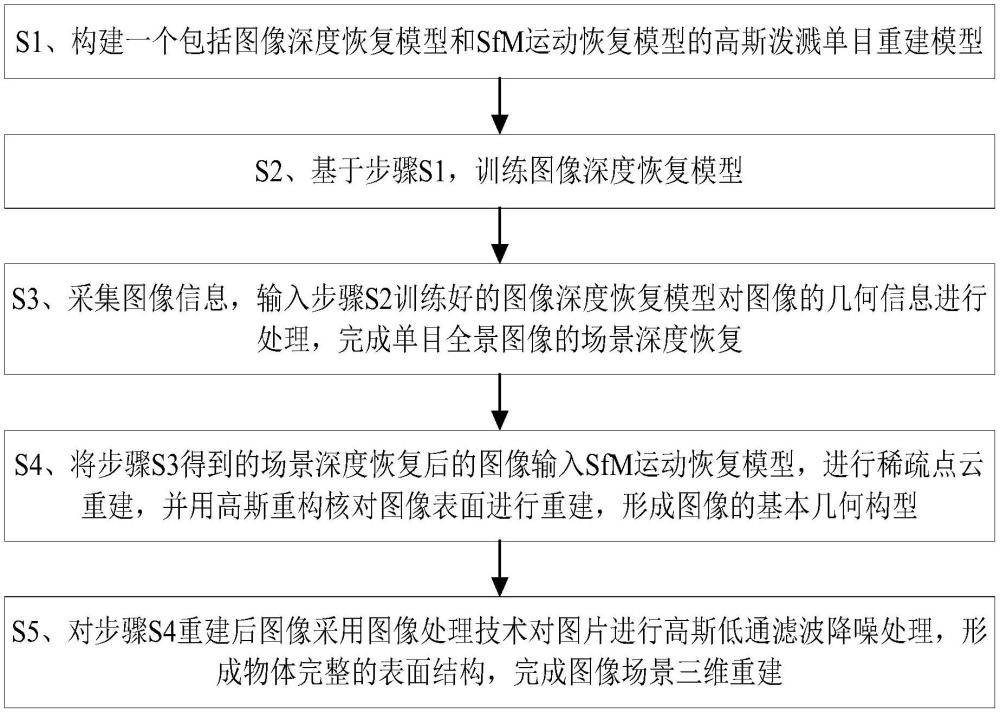
3、s1、構(gòu)建一個(gè)包括圖像深度恢復(fù)模型和sfm運(yùn)動(dòng)恢復(fù)模型的高斯?jié)姙R單目重建模型;
4、所述圖像深度恢復(fù)模型用于對(duì)單目全景圖像進(jìn)行場(chǎng)景深度恢復(fù),包括:預(yù)訓(xùn)練網(wǎng)絡(luò)、預(yù)測(cè)網(wǎng)絡(luò)。預(yù)訓(xùn)練網(wǎng)絡(luò)和預(yù)測(cè)網(wǎng)絡(luò)具體結(jié)構(gòu)均為基于球狀卷積的編碼-解碼結(jié)構(gòu),編碼器固定采用vgg16。所述sfm運(yùn)動(dòng)恢復(fù)模型用于對(duì)恢復(fù)的圖像進(jìn)行稀疏點(diǎn)云重建。
5、其中,所述基于球狀卷積的編碼-解碼結(jié)構(gòu)中,編碼器包括:球狀卷積層、池化層、包含交叉熵和正則化的損失函數(shù);且編碼模型共5個(gè)主層,每個(gè)主層包括一個(gè)球卷積層和一個(gè)池化層;編碼部分球卷積層和池化層共包含18個(gè)子層。解碼器包括:5層堆疊的反卷積層、relu激活函數(shù)。且解碼器與編碼器跳躍連接,對(duì)輸出使用上采樣。
6、s2、基于步驟s1,訓(xùn)練圖像深度恢復(fù)模型;
7、將圖像中對(duì)應(yīng)成像空間的點(diǎn)進(jìn)行視圖編碼,使其形成監(jiān)督學(xué)習(xí)序列作為預(yù)訓(xùn)練網(wǎng)絡(luò)和預(yù)測(cè)網(wǎng)絡(luò)的輸入。所述圖像深度恢復(fù)模型中嵌入自適應(yīng)矩估計(jì)算法adam優(yōu)化學(xué)習(xí)率,同時(shí)使用誤差反向傳播算法更新網(wǎng)絡(luò)權(quán)重,并使用所述兩種算法依次訓(xùn)練預(yù)訓(xùn)練網(wǎng)絡(luò)和預(yù)測(cè)網(wǎng)絡(luò),根據(jù)損失函數(shù)估計(jì)每個(gè)參數(shù)梯度變化,動(dòng)態(tài)調(diào)整參數(shù)的學(xué)習(xí)速率和學(xué)習(xí)步長(zhǎng),確定每次沿梯度反方向移動(dòng)的距離,不斷更新神經(jīng)網(wǎng)絡(luò)模型的權(quán)重,觀察模型輸出的損失函數(shù)和精度曲線,當(dāng)模型中的參數(shù)收斂,并且模型精度達(dá)到或者接近預(yù)設(shè)精度,訓(xùn)練過(guò)程終止,完成訓(xùn)練。
8、其中,adam計(jì)算出一個(gè)指數(shù)衰減的歷史梯度的平均mt,同時(shí)還計(jì)算一個(gè)指數(shù)衰減的歷史平方梯度的平均vt,其計(jì)算表達(dá)式如下:
9、
10、mt=?β1mt-1?+?(1-β1)gt???????????????(2)
11、vt?=?β2vt-1?+?(1-β2)gt2???????????????(3)
12、其中,θ表示模型中的任一參數(shù),ft(θ)表示噪聲目標(biāo)函數(shù)f(θ)在隨后時(shí)間步t上的隨機(jī)函數(shù)值。mt表示對(duì)梯度的一階矩的估計(jì),mt-1表示更新前梯度的一階矩的估計(jì),vt表示對(duì)梯度的二階矩的估計(jì),vt-1表示更新前梯度的二階矩的估計(jì),β1表示一階矩估計(jì)的指數(shù)衰減率,β2表示二階矩估計(jì)的指數(shù)衰減率。gt表示表示函數(shù)ft(θ)關(guān)于θ的梯度。adam中通過(guò)計(jì)算偏差矯正的一階矩估計(jì)和二階矩估計(jì)來(lái)抵消偏差,計(jì)算表達(dá)式如下:
13、
14、其中,表示時(shí)間步t的一階矩估計(jì),表示當(dāng)前時(shí)間步t的二階矩估計(jì),生成adam的參數(shù)更新公式如下:
15、
16、其中,θt+1表示時(shí)間步t+1的參數(shù)值,θt表示時(shí)間步t的參數(shù)值,η表示學(xué)習(xí)率,∈表示偏置值,且∈=10-8。
17、s3、采集圖像信息,輸入步驟s2訓(xùn)練好的圖像深度恢復(fù)模型對(duì)圖像的幾何信息進(jìn)行處理,完成單目全景圖像的場(chǎng)景深度恢復(fù);
18、s4、將步驟s3得到的場(chǎng)景深度恢復(fù)后的圖像輸入sfm運(yùn)動(dòng)恢復(fù)模型,進(jìn)行稀疏點(diǎn)云重建,并用高斯重構(gòu)核對(duì)圖像表面進(jìn)行重建,形成圖像的基本幾何構(gòu)型;
19、s5、對(duì)步驟s4重建后圖像采用圖像處理技術(shù)對(duì)圖片進(jìn)行高斯低通濾波降噪處理,形成物體完整的表面結(jié)構(gòu),完成圖像場(chǎng)景三維重建。
20、進(jìn)一步地,所述步驟s3具體如下:
21、s31、使用相機(jī)拍攝物體的單目全景圖像,得到圖像信息;
22、使用一臺(tái)相機(jī),并給相機(jī)設(shè)置轉(zhuǎn)臺(tái)的設(shè)計(jì),使其可以以單視角拍攝到物體的各個(gè)方向,使用該相機(jī)拍攝物體的單目全景圖像,得到圖像信息。
23、其中,所得圖片包括隨機(jī)的高頻噪聲。
24、s32、基于步驟s31得到的圖像信息,輸入到步驟s2訓(xùn)練好的圖像深度恢復(fù)模型對(duì)圖像的幾何信息進(jìn)行圖像恢復(fù)處理,使其輸出包含正確深度信息的圖像;
25、將圖形的處理過(guò)程視為三維坐標(biāo)的旋轉(zhuǎn)變化,被處理的圖像為三維旋轉(zhuǎn)群so(3),即旋轉(zhuǎn)過(guò)程中起始與結(jié)束狀態(tài)構(gòu)成的集合,則旋轉(zhuǎn)操作的矩陣形式表達(dá)式如下:
26、
27、其中,θ表示旋轉(zhuǎn)操作在三維空間中對(duì)應(yīng)的旋轉(zhuǎn)角度,rx(θ),ry(θ),rz(θ)分別表示在三維坐標(biāo)系中各個(gè)維度上的旋轉(zhuǎn)操作,rx(θ),ry(θ),rz(θ)對(duì)應(yīng)的矩陣分別為各個(gè)操作對(duì)應(yīng)的數(shù)學(xué)表示。
28、球狀卷積在球面s2上的求內(nèi)積函數(shù)表達(dá)式如下:
29、
30、其中,s2表示球面,表示球面上各個(gè)位置的像素函數(shù),fk(x)表示卷積核函數(shù),k表示第k個(gè)通道,k表示圖像通道總數(shù),x表示自變量。
31、在所述訓(xùn)練好的圖像深度恢復(fù)模型中,解碼部分共5大層,其中第一層中卷積部分的卷積核在球面s2上卷積,從第二層開(kāi)始卷積部分的卷積核在三維旋轉(zhuǎn)群so(3)中進(jìn)行卷積。在三維旋轉(zhuǎn)群中進(jìn)行操作時(shí),對(duì)于三維旋轉(zhuǎn)矩陣中的任意元素,存在的關(guān)聯(lián)的表達(dá)式如下:
32、
33、其中,xj表示原始三維向量x在標(biāo)準(zhǔn)基下的第j個(gè)分量,j是列指標(biāo);x′i表示經(jīng)過(guò)旋轉(zhuǎn)后的三維向量x′在標(biāo)準(zhǔn)基下的第i個(gè)分量,i是行指標(biāo)。表示旋轉(zhuǎn)矩陣r的元素,即從原始坐標(biāo)系的第j軸到旋轉(zhuǎn)后坐標(biāo)系的第i軸的映射。
34、基于歐拉角分解,so(3)中將發(fā)生的運(yùn)動(dòng)形式表示為兩次圍繞單坐標(biāo)軸的旋轉(zhuǎn)的函數(shù)和繞另一坐標(biāo)軸的運(yùn)動(dòng)的函數(shù)的乘積。先將坐標(biāo)軸視為常規(guī)的慣性系參考軸,對(duì)兩個(gè)坐標(biāo)軸上的運(yùn)動(dòng)進(jìn)行分析。然后,將坐標(biāo)軸視為以原點(diǎn)為載體的運(yùn)動(dòng)中心的載體系,其描述運(yùn)動(dòng)的形式為橫滾-俯仰,則給出運(yùn)動(dòng)過(guò)程的表達(dá)式如下:
35、ρ=rz(α)ry(β)rz(γ)?????(12)
36、其中,rz(α)ry(β)rz(γ)分別表示在三維坐標(biāo)系中各個(gè)維度上的旋轉(zhuǎn)操作,α,β,γ分別表示該旋轉(zhuǎn)操作與x,y,z三個(gè)坐標(biāo)軸的夾角;r與旋轉(zhuǎn)群上函數(shù)的內(nèi)積可視為矩陣的hadamard積,其進(jìn)行卷積時(shí)滿足等變性。選擇采用快速傅里葉變換算法進(jìn)行優(yōu)化。
37、所述訓(xùn)練好的圖像深度恢復(fù)模型利用wigner?d函數(shù)作為基底,使球卷積過(guò)程轉(zhuǎn)化為可進(jìn)行快速傅里葉變換算法的形式,具體如下:
38、首先設(shè)定wigner?d函數(shù)的表達(dá)式如下:
39、
40、其中,j,m,m'表示三個(gè)影響函數(shù)表征的主要指標(biāo);j為非負(fù)整數(shù),且滿足-j<m,m'<j。
41、則第二項(xiàng)為wigner?d函數(shù),其展開(kāi)表達(dá)式如下:
42、
43、其中,u表示m與m'差的絕對(duì)值,v表示m與m'和的絕對(duì)值,s表示j與(u+v)/2的的差值,表示雅可比多項(xiàng)式。則wigner?d函數(shù)第一項(xiàng)展開(kāi)表達(dá)式如下:
44、
45、其中,若j滿足大于m和m',wigner?d函數(shù)的值均為0。wigner?d函數(shù)的預(yù)先計(jì)算樣本陣列作為標(biāo)準(zhǔn)的二維平移快速傅里葉變換陣列。
46、設(shè)定n表示三維流形,u表示基函數(shù),則進(jìn)行g(shù)ft變換的表達(dá)式如下:
47、
48、其中,x表示球卷積在三維流形上的某點(diǎn),表示函數(shù)f在圖傅里葉變換后的第l個(gè)頻率成分,即譜系數(shù);f(x)表示一個(gè)定義在圖n上的函數(shù),即三維流形上的某點(diǎn)的信號(hào)值;表示基函數(shù)ul在節(jié)點(diǎn)x處的復(fù)共軛函數(shù)對(duì)應(yīng)的值;基函數(shù)ul是圖傅里葉變換中的正交基函數(shù),對(duì)應(yīng)于圖拉普拉斯算子的特征向量。使用s2流形時(shí)ul(x)為向量值yl(x),使用so(3)流形時(shí)ul(x)取矩陣值dl,根據(jù)wigner?d函數(shù)的反向推導(dǎo),得到so(3)上的點(diǎn)的表達(dá)式如下:
49、
50、根據(jù)式(16),對(duì)式(17)使用gfft算法,可得表達(dá)式如下:
51、
52、其中,d′表示wigner?d函數(shù)的復(fù)共軛函數(shù)。
53、進(jìn)一步地,所述步驟s4具體如下:
54、在sfm運(yùn)動(dòng)恢復(fù)模型生成稀疏點(diǎn)云后,選取三維高斯作為基元,采用協(xié)方差矩陣來(lái)定義集合信息,該矩陣的值由高斯核所對(duì)應(yīng)的區(qū)域空間的平均值確定。
55、使用一個(gè)三維的列向量v=(x0,x1,x2)t來(lái)表示射線空間中的點(diǎn)。給定一個(gè)中心投影和投影平面:坐標(biāo)x0和x1指定投影平面上的一個(gè)點(diǎn),第三坐標(biāo)x2指定從投影中心到觀看射線上的點(diǎn)的歐氏距離。則光路上光強(qiáng)度的表達(dá)式如下:
56、
57、其中,t表示轉(zhuǎn)置操作,μ是積分變量,在積分表達(dá)式中表示沿著射線從射線出射點(diǎn)到點(diǎn)ξ之間的某個(gè)位置。表示當(dāng)把照相機(jī)作為原點(diǎn)時(shí),射線上的點(diǎn)在射線上的位置;l表示射線出射點(diǎn)至處的距離;ξ表示射線照射方向,并使用3d高斯單位向量的形式進(jìn)行表示;表示發(fā)射系數(shù),即點(diǎn)處的顏色;g(x)表示定義光遮蔽率的散光函數(shù);表示在處沿著射線方向ξ的發(fā)射系數(shù),指數(shù)項(xiàng)為衰減系數(shù);是光源項(xiàng),其描述在處沿著射線方向ξ散射的光強(qiáng)。散光函數(shù)是高斯重構(gòu)核的加權(quán)和,表達(dá)式如下:
58、
59、其中,gkg表示第kg個(gè)加權(quán)系數(shù),它表示第kg個(gè)高斯重構(gòu)核對(duì)散光函數(shù)的貢獻(xiàn)程度。高斯重構(gòu)核是第kg個(gè)重建核函數(shù),描述在位置處的光散射或衰減特性,反應(yīng)單個(gè)粒子的位置和形狀。將式(20)代入式(19),得到:
60、
61、然后設(shè)定發(fā)射系數(shù)為常數(shù)c0,并使用泰勒展開(kāi)的前兩項(xiàng)作為指數(shù)的近似值,得到式(21)的簡(jiǎn)化表達(dá)式如下:
62、
63、其中,表示積分重構(gòu)核,即高斯重構(gòu)核的積分,且
64、最后,sfm運(yùn)動(dòng)恢復(fù)模型完成對(duì)圖像表面的重建。對(duì)于輸出的重構(gòu)后的圖片,原本彎曲的直線應(yīng)變得接近直線;若圖像中包含矩形對(duì)象,則重建后的矩形圖像的四條邊應(yīng)接近直線段,且四個(gè)頂角應(yīng)接近于90°直角;原圖像中的部分橢圓重建后應(yīng)接近圓形;原圖中的部分夾角的角度在重建后應(yīng)出現(xiàn)一定程度的縮小。
65、進(jìn)一步地,所述步驟s5中,完成圖像場(chǎng)景三維重建后,所述高斯?jié)姙R單目重建模型的重建性能評(píng)價(jià)指標(biāo)具體如下:
66、所述評(píng)價(jià)指標(biāo)包括:峰值信噪比psnr、結(jié)構(gòu)相似性指數(shù)ssim和學(xué)習(xí)感知圖像塊相似度lpips。
67、(1)峰值信噪比psnr;
68、
69、其中,mse表示均方誤差;m,n分別表示圖像的寬度和高度,i(i,j)表示處理前的圖像在(i,j)位置處的像素值,k(i,j)表示處理后的圖像在(i,j)位置處的像素值,maxi表示圖像中最大可能的像素值。
70、(2)結(jié)構(gòu)相似性ssim;
71、
72、其中,ux、uy分別表示圖像x、y的像素的均值,圖像x和圖像y分別表示經(jīng)由所述高斯?jié)姙R單目重建模型重構(gòu)前和重構(gòu)后的圖像;c1、c2為常數(shù),且滿足c1=(k1×l)2,c2=(k2×l)2,k1和k2表示避免在計(jì)算ssim時(shí)分母為零的兩個(gè)常數(shù),l表示像素值的動(dòng)態(tài)范圍,即圖像中像素值可能的最大值;σxy表示圖像x和圖像y的像素值之間的協(xié)方差,度量?jī)蓤D像中對(duì)應(yīng)像素值的相關(guān)性;表示圖像x的像素值的方差;表示圖像y的像素值的方差。
73、(3)學(xué)習(xí)感知圖像塊相似度lpips;
74、
75、其中,d(p,p0)表示兩個(gè)圖像塊p和p0之間的距離度量;hl、wl表示第l層輸出的長(zhǎng)度和寬度;wl權(quán)重用于對(duì)每個(gè)通道的輸出進(jìn)行加權(quán)縮放;和分別表示在位置(h,w)處,第l層網(wǎng)絡(luò)對(duì)輸入圖像塊p和p0的激活輸出,h和w表示圖像上的空間坐標(biāo)。
76、本發(fā)明的有益效果:本發(fā)明的方法首先構(gòu)建一個(gè)包括圖像深度恢復(fù)模型和sfm運(yùn)動(dòng)恢復(fù)模型的高斯?jié)姙R單目重建模型,并訓(xùn)練圖像深度恢復(fù)模型,再拍攝全景圖片,并將其用球狀卷積進(jìn)行訓(xùn)練,恢復(fù)失真部分,然后通過(guò)sfm運(yùn)動(dòng)恢復(fù)模型進(jìn)行稀疏點(diǎn)云重建,并用高斯重構(gòu)核對(duì)圖像表面進(jìn)行重建,形成圖像的基本幾何構(gòu)型,最后采用圖像處理技術(shù)對(duì)圖片進(jìn)行高斯低通濾波降噪處理,形成物體完整的表面結(jié)構(gòu),完成圖像場(chǎng)景三維重建。本發(fā)明的方法使用三維高斯?jié)姙R技術(shù)與球狀卷積核相結(jié)合,以構(gòu)建物體幾何模型,在可操作性上有了顯著的提高,極大地提高了計(jì)算的速度,在智慧醫(yī)療,工程探傷等領(lǐng)域具有重要的應(yīng)用價(jià)值。本發(fā)明的方法為臨床診斷,特殊工程項(xiàng)目等場(chǎng)景提供技術(shù)支持。在臨床診斷中,所述高斯?jié)姙R單目重建模型可以將病患腿部的靜脈曲張圖像展開(kāi)到二維平面進(jìn)行重建,方便醫(yī)生進(jìn)行診斷。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!