基于編碼器-解碼器的橋梁車輛荷載感知方法及系統(tǒng)與流程
本發(fā)明屬于信號處理和結(jié)構(gòu)健康監(jiān)測,特別是涉及一種基于編碼器-解碼器的橋梁車輛荷載感知方法及系統(tǒng),可以直接應(yīng)用于智慧基礎(chǔ)設(shè)施、橋梁工程等。
背景技術(shù):
1、車輛荷載,作為橋梁結(jié)構(gòu)承受的主要荷載類型,精準(zhǔn)獲取其數(shù)據(jù)對于橋梁結(jié)構(gòu)健康監(jiān)測意義非凡。然而,過往受制于測量手段的局限,橋面上實時車輛荷載信息宛如隱匿于迷霧之中,極難被精準(zhǔn)捕捉。傳統(tǒng)測量方法不僅操作繁瑣,還常伴有精度欠佳、數(shù)據(jù)采集不連貫等弊端,難以滿足當(dāng)下橋梁精細化管理以及實時安全預(yù)警的嚴(yán)苛要求。
2、近年,動態(tài)地秤數(shù)據(jù)與計算機視覺技術(shù)匹配方案嶄露頭角,借助攝像頭捕捉車輛視頻流,結(jié)合動態(tài)地秤處的車重、圖像特征等信息,以此定位車輛在橋梁上的實時位置。此方法雖在部分場景有所建樹,但面對量大面廣、未安裝動態(tài)地秤設(shè)備的城市中小橋梁時,短板盡顯。單純依靠視頻圖像數(shù)據(jù),受限于光線變化、遮擋、圖像分辨率以及車型復(fù)雜多樣等因素干擾,致使精準(zhǔn)車輛荷載信息的預(yù)測難如登天,預(yù)測誤差居高不下,進而令該方法在中小橋梁場景的實用性大打折扣。
3、與此同時,橋梁結(jié)構(gòu)力學(xué)領(lǐng)域研究揭示,車輛荷載作用于橋梁引發(fā)的動態(tài)變形,恰似一本記錄車輛與結(jié)構(gòu)關(guān)鍵信息的?“密碼本”,其間蘊含著豐富荷載細節(jié)與結(jié)構(gòu)狀態(tài)線索。倘若能夠巧妙地從結(jié)構(gòu)變形數(shù)據(jù)里將車輛荷載與橋梁結(jié)構(gòu)固有信息精準(zhǔn)解耦,不但有望實現(xiàn)高精度的車輛荷載感知,還能順勢分離出結(jié)構(gòu)實時狀態(tài)信息,為橋梁健康診斷開辟全新路徑。故而,研發(fā)一種僅依托結(jié)構(gòu)變形等響應(yīng)數(shù)據(jù),便能實時、精準(zhǔn)推斷橋面車輛荷載的方法迫在眉睫,此舉既能填補現(xiàn)有技術(shù)在中小橋梁車輛荷載監(jiān)測領(lǐng)域的空白,又契合智慧基礎(chǔ)設(shè)施建設(shè)邁向智能化、精細化的時代訴求。
技術(shù)實現(xiàn)思路
1、本發(fā)明旨在解決城市中小橋梁橋面車輛荷載實時精準(zhǔn)感知的問題,基于結(jié)構(gòu)變形數(shù)據(jù)進行橋面車輛荷載實時推斷,提出一種僅根據(jù)結(jié)構(gòu)變形等響應(yīng)數(shù)據(jù)即可實現(xiàn)推斷的模型,該模型可廣泛適用于無動態(tài)地秤的橋面實時車輛荷載精準(zhǔn)感知中,且克服了基于計算機視覺方法的匹配誤差。
2、針對現(xiàn)有技術(shù)的以上缺陷或改進需求,按照本發(fā)明第一方面,本發(fā)明提出了一種基于編碼器-解碼器的橋梁車輛荷載感知方法,方法的具體步驟包括:
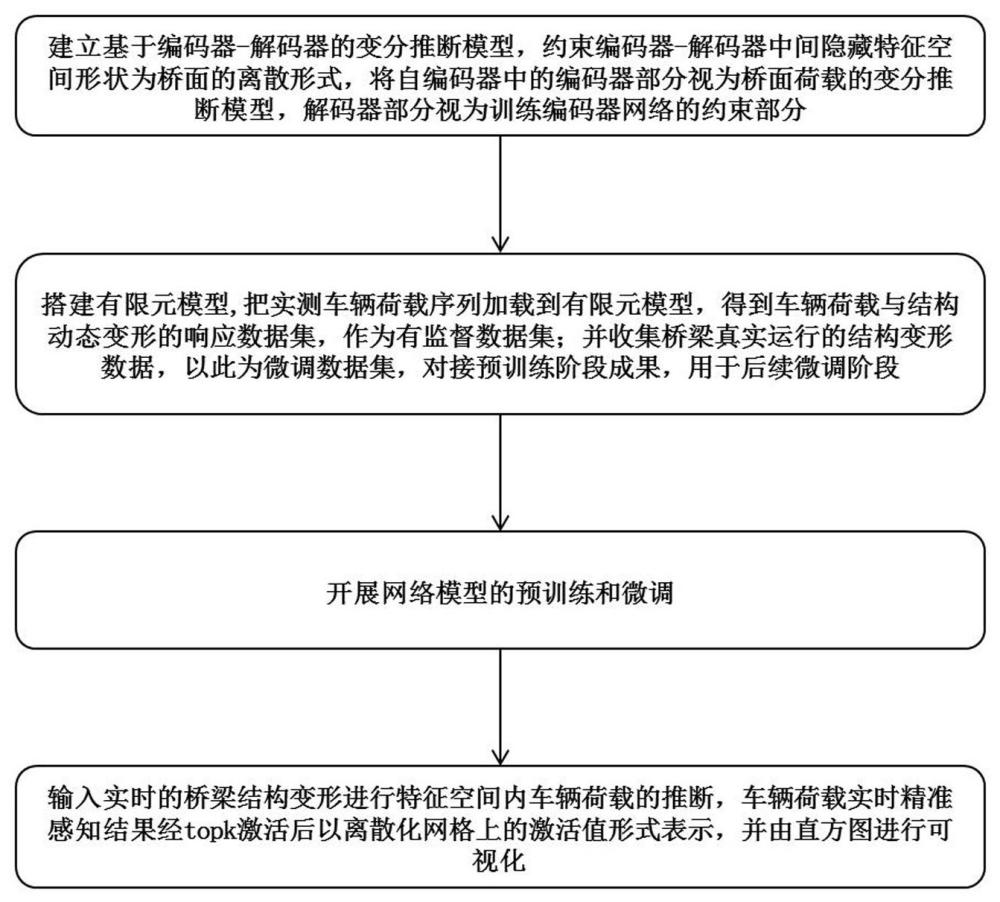
3、s1.建立基于編碼器-解碼器的變分推斷模型,約束編碼器-解碼器中間隱藏特征空間形狀為橋面的離散形式,將自編碼器中的編碼器部分視為橋面荷載的變分推斷模型,解碼器部分視為訓(xùn)練編碼器網(wǎng)絡(luò)的約束部分;并在網(wǎng)絡(luò)的編碼器部分額外引入一個檢測器,用于識別當(dāng)前橋面的車輛個數(shù);
4、s2.搭建有限元模型,把實測車輛荷載序列加載到有限元模型,得到車輛荷載與結(jié)構(gòu)動態(tài)變形的響應(yīng)數(shù)據(jù)集,作為有監(jiān)督數(shù)據(jù)集;并收集橋梁真實運行的結(jié)構(gòu)變形數(shù)據(jù),以此為微調(diào)數(shù)據(jù)集,對接預(yù)訓(xùn)練階段成果,用于后續(xù)微調(diào)階段;
5、s3.開展網(wǎng)絡(luò)模型的預(yù)訓(xùn)練和微調(diào),具體步驟如下:
6、(1)預(yù)訓(xùn)練階段除損失函數(shù)除變分推斷損失、重構(gòu)誤差損失和參數(shù)正則化項等損失項外增加車輛荷載有監(jiān)督損失函數(shù),用于引導(dǎo)編碼器網(wǎng)絡(luò)快速收斂;
7、(2)預(yù)訓(xùn)練完成后,針對真實結(jié)構(gòu)變形數(shù)據(jù),凍結(jié)檢測器、編碼器和解碼器網(wǎng)絡(luò)參數(shù),在編碼器到隱藏層特征間增加輸出層,基于編碼器狀態(tài)進行車輛荷載推斷,微調(diào)階段僅訓(xùn)練該輸出層網(wǎng)絡(luò)參數(shù);微調(diào)階段的損失函數(shù)僅包含變分推斷損失、重構(gòu)誤差損失和參數(shù)正則化項;
8、s4.輸入實時的橋梁結(jié)構(gòu)變形進行特征空間內(nèi)車輛荷載的推斷,車輛荷載實時精準(zhǔn)感知結(jié)果經(jīng)top-k激活后以離散化網(wǎng)格上的激活值形式表示,并由直方圖進行可視化。
9、進一步地,s1中橋面的離散形式為:根據(jù)橫橋向和順橋向?qū)蛎骐x散化,得到與橋面離散化網(wǎng)格形狀相對應(yīng)的特征空間尺寸m×n,其中m為順橋向離散網(wǎng)格數(shù)量,n為橫橋向離散網(wǎng)格數(shù)量。
10、進一步地,s1中編碼器輸入為結(jié)構(gòu)變形響應(yīng),輸出為由均值和方差矩陣構(gòu)成的車輛荷載分布實時推斷結(jié)果:,其中均值和方差矩陣的形狀均為m×n,表示輸入為的編碼器網(wǎng)絡(luò)。
11、進一步地,s1中所述檢測器,具體如下:
12、考慮橋面車輛荷載稀疏性,對的輸出進行稀疏激活,采用top-k激活的方式進行,在網(wǎng)絡(luò)的編碼器部分額外引入一個檢測器,用于識別當(dāng)前橋面的車輛個數(shù),通過一個softmax激活函數(shù)選取其中最大的k項,?k為檢測器的輸出結(jié)果,softmax激活函數(shù)的輸入為均值,輸出的非零項可表示為:。
13、進一步地,s1中解碼器的輸入為編碼器推斷的車輛荷載值,輸出為結(jié)構(gòu)變形重構(gòu)數(shù)據(jù),其中為對推斷車輛荷載的采樣。
14、進一步地,s1中編碼器-解碼器的變分推斷模型的損失函數(shù)包含橋梁實時車輛荷載變分推斷損失、重構(gòu)誤差損失和參數(shù)正則化項;
15、變分推斷的損失函數(shù)項為:
16、
17、其中,和分別代表編碼器和解碼器網(wǎng)絡(luò)的參數(shù),代表證據(jù)下界,代表推斷分布與先驗高斯分布的kl散度;
18、解碼器重構(gòu)誤差的損失為:
19、
20、即編碼器輸入的結(jié)構(gòu)變形原始數(shù)據(jù)和解碼器重構(gòu)的變形數(shù)據(jù)的均方誤差損失。
21、進一步地,s2中有監(jiān)督的預(yù)訓(xùn)練數(shù)據(jù)集包括:車輛荷載和結(jié)構(gòu)變形等響應(yīng)數(shù)據(jù)集:
22、結(jié)構(gòu)變形數(shù)據(jù)維度為c×t,其中c表示結(jié)構(gòu)變形響應(yīng)傳感器數(shù)量,t表示監(jiān)測序列長度;
23、車輛荷載進行橋面離散化處理,根據(jù)離散化網(wǎng)格,明確橋面網(wǎng)格上車重為零項和非零項的位置。
24、進一步地,s2中微調(diào)數(shù)據(jù)集采用結(jié)構(gòu)真實響應(yīng),結(jié)構(gòu)變形數(shù)據(jù)維度與預(yù)訓(xùn)練數(shù)據(jù)集中保持一致,c×t,其中c表示結(jié)構(gòu)變形響應(yīng)傳感器數(shù)量,t表示監(jiān)測序列長度。
25、按照本發(fā)明第二方面,提供一種基于編碼器-解碼器的橋梁車輛荷載感知系統(tǒng),包括:
26、編碼器-解碼器的變分推斷模型構(gòu)建單元,用于建立基于編碼器-解碼器的變分推斷模型,約束編碼器-解碼器中間隱藏特征空間形狀為橋面的離散形式,將自編碼器中的編碼器部分視為橋面荷載的變分推斷模型,解碼器部分視為訓(xùn)練編碼器網(wǎng)絡(luò)的約束部分;
27、模型訓(xùn)練的數(shù)據(jù)集構(gòu)建單元,用于搭建有限元模型,把實測車輛荷載序列加載到有限元模型,得到車輛荷載與結(jié)構(gòu)動態(tài)變形的響應(yīng)數(shù)據(jù)集,作為有監(jiān)督數(shù)據(jù)集;并收集橋梁真實運行的結(jié)構(gòu)變形數(shù)據(jù),以此為微調(diào)數(shù)據(jù)集,對接預(yù)訓(xùn)練階段成果,用于后續(xù)微調(diào)階段;
28、網(wǎng)絡(luò)模型的預(yù)訓(xùn)練和微調(diào)單元,用于開展網(wǎng)絡(luò)模型的預(yù)訓(xùn)練和微調(diào)階段,具體步驟如下:
29、(1)預(yù)訓(xùn)練階段除損失函數(shù)除變分推斷損失、重構(gòu)誤差損失和參數(shù)正則化項等損失項外增加車輛荷載有監(jiān)督損失函數(shù),用于引導(dǎo)編碼器網(wǎng)絡(luò)快速收斂;
30、(2)預(yù)訓(xùn)練完成后,針對真實結(jié)構(gòu)變形數(shù)據(jù),凍結(jié)檢測器、編碼器和解碼器網(wǎng)絡(luò)參數(shù),在編碼器到隱藏層特征間增加輸出層,基于編碼器狀態(tài)進行車輛荷載推斷,微調(diào)階段僅訓(xùn)練該輸出層網(wǎng)絡(luò)參數(shù);微調(diào)階段的損失函數(shù)僅包含變分推斷損失、重構(gòu)誤差損失和參數(shù)正則化項;
31、車輛荷載實時識別單元,用于輸入實時的橋梁結(jié)構(gòu)變形進行特征空間內(nèi)車輛荷載的推斷,車輛荷載實時精準(zhǔn)感知結(jié)果經(jīng)top-k激活后以離散化網(wǎng)格上的激活值形式表示,并由直方圖進行可視化。
32、作為本發(fā)明的第三方面,還涉及一種計算機可讀存儲介質(zhì),其上存儲有計算機程序,該計算機程序被處理器執(zhí)行用于基于編碼器-解碼器的橋梁車輛荷載感知方法。
33、總體而言,通過本發(fā)明所構(gòu)思的以上技術(shù)方案與現(xiàn)有技術(shù)相比,能夠取得下列有益效果:
34、1.本發(fā)明基于編碼器-解碼器架構(gòu)的橋梁車輛荷載精準(zhǔn)感知變分推斷方法,通過構(gòu)建獨特的基于編碼器-解碼器架構(gòu)和變分推斷的橋面車輛荷載推斷模型,以橋梁結(jié)構(gòu)多源多類型實時響應(yīng)監(jiān)測數(shù)據(jù)為輸入,實現(xiàn)僅依據(jù)結(jié)構(gòu)變形等響應(yīng)數(shù)據(jù)進行推斷,克服了基于計算機視覺方法在無動態(tài)地秤的城市中小橋梁應(yīng)用時的匹配誤差,并且該模型可廣泛適用于這類橋梁的實時車輛荷載精準(zhǔn)感知場景。
35、2.本發(fā)明基于編碼器-解碼器架構(gòu)的橋梁車輛荷載精準(zhǔn)感知變分推斷方法,通過采用“有限元數(shù)據(jù)預(yù)訓(xùn)練+真實數(shù)據(jù)微調(diào)”的創(chuàng)新訓(xùn)練范式,利用基于橋梁結(jié)構(gòu)有限元模型仿真數(shù)據(jù)生成的實時車輛荷載-結(jié)構(gòu)動態(tài)變形預(yù)訓(xùn)練數(shù)據(jù)集,以及獲取的真實結(jié)構(gòu)動態(tài)變形微調(diào)數(shù)據(jù)集,讓該方法得以基于真實監(jiān)測數(shù)據(jù)的少樣本快速部署到不同的橋梁工程中,極大降低了模型訓(xùn)練對大量樣本的依賴,縮短部署周期,提升了實用性與適配性。
36、3.本發(fā)明基于編碼器-解碼器架構(gòu)的橋梁車輛荷載精準(zhǔn)感知變分推斷方法,通過精心設(shè)計網(wǎng)絡(luò)架構(gòu),約束編碼器-解碼器中間隱藏特征空間形狀為橋面的離散形式,引入稀疏激活機制,配合包含橋梁實時車輛荷載變分推斷結(jié)果受最大證據(jù)下界、重構(gòu)誤差和參數(shù)正則化項的損失函數(shù),精準(zhǔn)建立起結(jié)構(gòu)響應(yīng)-橋面荷載的關(guān)聯(lián)關(guān)系,解決了傳統(tǒng)方法無法獲取橋面車輛荷載實時分布、荷載智能識別模型需要大量人工標(biāo)注等棘手難題,為橋梁結(jié)構(gòu)健康監(jiān)測、智慧基礎(chǔ)設(shè)施建設(shè)以及橋梁工程的精細化運維提供關(guān)鍵技術(shù)支撐,有力推動行業(yè)向智能化方向發(fā)展。
- 還沒有人留言評論。精彩留言會獲得點贊!