一種基于灰度共生矩陣的弱特征表面缺陷檢測(cè)方法、終端及存儲(chǔ)介質(zhì)
本發(fā)明涉及圖像處理領(lǐng)域,針對(duì)弱特征圖像表面缺陷檢測(cè)問(wèn)題,具體地涉及一種基于灰度共生矩陣的弱特征表面缺陷檢測(cè)方法、終端及存儲(chǔ)介質(zhì)。
背景技術(shù):
1、缺陷檢測(cè)作為提高工業(yè)產(chǎn)品質(zhì)量的重要手段,得到了越來(lái)越多的重視,其中低辨識(shí)度表面缺陷檢測(cè)是工業(yè)視覺(jué)檢測(cè)中的重要研究方向,主要針對(duì)對(duì)比度低、紋理復(fù)雜、尺寸小或形狀不規(guī)則的缺陷。表面缺陷(如裂紋、劃痕)直接影響產(chǎn)品性能,早期檢測(cè)可以減少?gòu)U品率,一個(gè)優(yōu)秀的檢測(cè)方法在提升產(chǎn)品質(zhì)量、降低生產(chǎn)成本、提高生產(chǎn)效率、保障安全性等方面具有重要意義。目前常用的缺陷檢測(cè)方法主要依賴圖像增強(qiáng)、特征提取和機(jī)器學(xué)習(xí)等技術(shù),雖然取得了一定的成效,但在處理低辨識(shí)度、復(fù)雜紋理缺陷時(shí)效果有限。針對(duì)低辨識(shí)度表面缺陷檢測(cè)問(wèn)題,為克服當(dāng)前檢測(cè)方法中存在的檢測(cè)精度差、檢測(cè)效率低等問(wèn)題。
技術(shù)實(shí)現(xiàn)思路
1、為了解決上述技術(shù)問(wèn)題,本發(fā)明提出一種基于灰度共生矩陣的弱特征表面缺陷檢測(cè)方法,包括如下步驟:
2、基于圖像非均勻閾值分割生成灰度共生矩陣并提取紋理特征,其步驟包括:
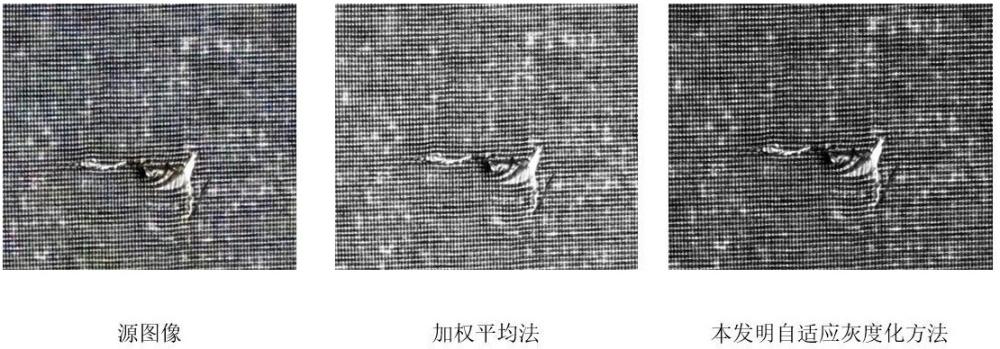
3、s11.通過(guò)自適應(yīng)圖像灰度化算法對(duì)源圖像進(jìn)行灰度化處理,基于各顏色通道直方圖動(dòng)態(tài)計(jì)算權(quán)重系數(shù);
4、s12.采用聚類算法對(duì)像素閾值進(jìn)行非均勻分割;
5、s13.在分割后的圖像上生成多方向灰度共生矩陣,提取相關(guān)性、對(duì)比度、同質(zhì)性和能量四個(gè)紋理特征向量;
6、構(gòu)建融合紋理特征的yolov3深度學(xué)習(xí)檢測(cè)模型,其步驟包括:
7、s21.?生成初始錨框尺寸,提取目標(biāo)圖像的多尺度特征圖,構(gòu)建多個(gè)檢測(cè)層分別對(duì)應(yīng)不同尺度特征圖;
8、s22.對(duì)每個(gè)候選區(qū)域計(jì)算灰度共生矩陣特征向量,生成融合灰度共生矩陣的標(biāo)注向量;
9、s23.構(gòu)建基于紋理特征向量的損失函數(shù);
10、s24.通過(guò)非極大值抑制算法篩選最終檢測(cè)結(jié)果,根據(jù)交并比閾值合并重疊檢測(cè)框。
11、進(jìn)一步地,步驟s11所述自適應(yīng)圖像灰度化算法具體步驟包括:
12、獲取圖像每個(gè)通道的直方圖、、;
13、對(duì)各通道直方圖進(jìn)行增續(xù)排序,獲得新的直方圖、、;
14、取其中占有顯著比例的像素值計(jì)算各通道的權(quán)重,其公式為:
15、
16、其中,、、分別為r、g、b通道的權(quán)重,為每個(gè)通道占顯著比例的像素比例值,表示取通道中占比為的像素值,表示計(jì)算這些像素值的和。
17、進(jìn)一步地,步驟s12所述聚類算法采用k-means聚類算法,目標(biāo)函數(shù)為:
18、
19、其中,為目標(biāo)函數(shù),為對(duì)直方圖聚類的簇的索引,為每個(gè)簇中直方圖元素的索引,為每個(gè)簇中所包含的直方圖元素的數(shù)量,為所設(shè)定的聚類數(shù)量,為每個(gè)直方圖元素的值,為每個(gè)簇中直方圖元素的平均值。
20、進(jìn)一步地,步驟s13所述生成多方向灰度共生矩陣的方法為:
21、灰度等級(jí)為m的灰度圖像中任意元素可表示為,其中為設(shè)定的原圖像中像素的距離,為設(shè)定的方向,取,和分別表示灰度共生矩陣的行、列索引,也代表著圖像的灰度級(jí)。
22、進(jìn)一步地,所述紋理特征向量提取公式為:
23、相關(guān)性:
24、;
25、對(duì)比度:
26、;
27、同質(zhì)性:
28、;
29、能量:
30、;
31、其中、分別為灰度共生矩陣中的像素級(jí),對(duì)應(yīng)圖像中的像素值,為歸一化后的灰度共生矩陣中的值,、分別為像素值的平均值和標(biāo)準(zhǔn)差。
32、進(jìn)一步地,步驟s22所述融合灰度共生矩陣的標(biāo)注向量為:
33、;
34、其中,為yolov3算法中候選區(qū)域的標(biāo)注向量,標(biāo)簽表示候選區(qū)域中是否包含目標(biāo),表示候選區(qū)域相對(duì)于圖片的位置,表示候選區(qū)域中物體的類別標(biāo)簽;
35、,、、、分別為相關(guān)性、對(duì)比度、同質(zhì)性和能量4個(gè)特征量,,、、為,下不同的組合。
36、進(jìn)一步地,步驟s23所述的基于紋理特征向量的損失函數(shù)為:
37、;
38、其中為分類損失,為置信度損失,為邊界框損失,為灰度共生矩陣損失,且
39、;
40、其中,為候選區(qū)域的索引,為候選區(qū)域的數(shù)量,為灰度共生矩陣類別的索引,共4種,為灰度共生矩陣中的元素所對(duì)應(yīng)的權(quán)重,可根據(jù)不同的情境和實(shí)驗(yàn)結(jié)果設(shè)定不同值,本發(fā)明中采用等值權(quán)重,。
41、本發(fā)明還提供一種終端,包括存儲(chǔ)器、處理器及存儲(chǔ)在存儲(chǔ)器上的計(jì)算機(jī)程序,所述處理器執(zhí)行所述程序時(shí)實(shí)現(xiàn)上述方法中的步驟。
42、本發(fā)明還提供一種存儲(chǔ)介質(zhì),存儲(chǔ)有計(jì)算機(jī)程序指令,當(dāng)所述指令被處理器執(zhí)行時(shí)實(shí)現(xiàn)上述方法中的步驟。
43、本發(fā)明的有益效果:
44、本發(fā)明針對(duì)弱特征圖像表面缺陷檢測(cè)問(wèn)題將灰度共生矩陣與卷積神經(jīng)網(wǎng)絡(luò)技術(shù)相結(jié)合,使用自適應(yīng)圖像灰度化算法對(duì)源圖像進(jìn)行處理,然后使用非均勻閾值分割算法完成圖像的多閾值分割,在此基礎(chǔ)上生成圖像灰度共生矩陣并計(jì)算相應(yīng)的特征量,然后將灰度共生矩陣的特征量與yolov3神經(jīng)網(wǎng)絡(luò)算法相結(jié)合,并改進(jìn)yolov3算法的損失函數(shù),從而有效提高了對(duì)弱特征圖像表面缺陷檢測(cè)的準(zhǔn)確性和可靠性,具有廣闊的應(yīng)用市場(chǎng)空間和經(jīng)濟(jì)價(jià)值。
技術(shù)特征:
1.一種基于灰度共生矩陣的弱特征表面缺陷檢測(cè)方法,其特征在于,包括如下步驟:
2.根據(jù)權(quán)利要求1所述的一種基于灰度共生矩陣的弱特征表面缺陷檢測(cè)方法,其特征在于:
3.根據(jù)權(quán)利要求1所述的一種基于灰度共生矩陣的弱特征表面缺陷檢測(cè)方法,其特征在于:
4.根據(jù)權(quán)利要求1所述的一種基于灰度共生矩陣的弱特征表面缺陷檢測(cè)方法,其特征在于:
5.根據(jù)權(quán)利要求4所述的一種基于灰度共生矩陣的弱特征表面缺陷檢測(cè)方法,其特征在于:
6.根據(jù)權(quán)利要求4所述的一種基于灰度共生矩陣的弱特征表面缺陷檢測(cè)方法,其特征在于:
7.根據(jù)權(quán)利要求6所述的一種基于灰度共生矩陣的弱特征表面缺陷檢測(cè)方法,其特征在于:
8.一種終端,其特征在于,包括存儲(chǔ)器、處理器及存儲(chǔ)在存儲(chǔ)器上的計(jì)算機(jī)程序,所述處理器執(zhí)行所述程序時(shí)實(shí)現(xiàn)權(quán)利要求1-7任一所述方法的步驟。
9.一種存儲(chǔ)介質(zhì),其特征在于,存儲(chǔ)有計(jì)算機(jī)程序指令,當(dāng)所述指令被處理器執(zhí)行時(shí)實(shí)現(xiàn)權(quán)利要求1-7任一所述方法的步驟。
技術(shù)總結(jié)
本發(fā)明公開(kāi)了一種基于灰度共生矩陣的弱特征表面缺陷檢測(cè)方法、終端及存儲(chǔ)介質(zhì),屬于圖像處理技術(shù)領(lǐng)域,步驟包括S1.基于圖像非均勻閾值分割生成灰度共生矩陣并提取紋理特征和S2構(gòu)建融合紋理特征的YOLOv3深度學(xué)習(xí)檢測(cè)模型。本發(fā)明針對(duì)弱特征圖像表面缺陷檢測(cè)問(wèn)題將灰度共生矩陣與卷積神經(jīng)網(wǎng)絡(luò)技術(shù)相結(jié)合,使用自適應(yīng)圖像灰度化算法對(duì)源圖像進(jìn)行處理,然后使用非均勻閾值分割算法完成圖像的多閾值分割,在此基礎(chǔ)上生成圖像灰度共生矩陣并計(jì)算相應(yīng)的特征量,然后將灰度共生矩陣的特征量與YOLOv3神經(jīng)網(wǎng)絡(luò)算法相結(jié)合,并改進(jìn)YOLOv3算法的損失函數(shù),從而有效提高了對(duì)弱特征圖像表面缺陷檢測(cè)的準(zhǔn)確性和可靠性,具有廣闊的應(yīng)用市場(chǎng)空間和經(jīng)濟(jì)價(jià)值。
技術(shù)研發(fā)人員:李芯蕊,時(shí)辰,姚崇棋,孔瑜,劉暢,王思源,席偉陽(yáng),王振宇,胡程堯,趙陳陳,張業(yè)銘,李昱妍,況亞偉,楊希峰,張德寶
受保護(hù)的技術(shù)使用者:常熟理工學(xué)院
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!