一種輕量級實時路面裂痕智能檢測方法
本發明涉及圖像處理和人工智能,尤其是涉及一種輕量級實時路面裂痕智能檢測方法。
背景技術:
1、在數字孿生技術與智慧城市發展的背景下,道路損壞的智能檢測已成為保障道路質量、安全性、通行效率及行駛舒適度的重要環節。如果道路損壞未能得到及時識別與修復,不僅會影響駕駛體驗,還可能對車輛性能、交通安全乃至生命財產安全構成嚴重威脅,甚至在某些情況下導致不可逆的人員傷害和經濟損失。目前,道路損壞的檢測工作仍主要依賴人工巡檢,即由結構工程師及認證檢測人員定期開展現場勘查,并記錄損壞的具體位置。然而,這種傳統的人工巡檢方式易受行駛速度、檢測人員經驗水平及注意力集中度等因素的影響,導致檢測效率低、運營成本高,并且難以有效保障巡檢人員的安全。此外,由于人工檢測高度依賴檢測人員的主觀判斷和經驗積累,其結果往往缺乏客觀性和一致性。因此,隨著人工智能技術的快速發展,一些科技企業正積極研發基于智能算法的道路損壞檢測技術,以推動人工智能在道路巡檢領域的應用。其中,基于深度學習的路面裂痕智能檢測已成為該領域的研究熱點之一。
2、在深度學習技術尚未廣泛應用之前,路面裂痕的智能檢測主要依托傳統二維圖像分析與處理體系,其方法框架可歸納為特征提取(包括梯度特征提取、灰度閾值分割)、紋理特征解析、頻域分析及最小路徑搜索算法等典型范式。雖然此類算法在特定場景下具有適用性(如簡易背景下的線性裂痕識別),但在實際工程應用中普遍存在計算量大,對光照和天氣等環境因素變化敏感,魯棒性不足等技術缺陷。此外,由于路面裂痕的形狀并不是規則的,傳統圖像處理方法所使用的假設模型,往往與真實裂痕形態學特征存在顯著偏差,這從根本上制約了傳統算法的工程應用價值。
3、在突破傳統檢測手段的瓶頸過程中,人工智能技術的快速演進促使科研人員引入多元機器學習方案進行道路損傷識別,典型如支持向量機(svm)、隨機森林(randomforest)、馬爾可夫隨機場(markov?random?field)及adaboost等集成算法。深度學習的范式革新推動了卷積深度神經網絡(dcnn)在道路損壞檢測中的革新性應用,其憑借端到端的特征學習能力已成為該領域的核心突破方向。相較于依賴人工參數調節與閾值設定的傳統圖像分割手段,dcnn通過海量標注數據自適應的特征提取機制,實現了參數優化過程的自動化,擺脫了對裂痕幾何特征的先驗限制,且在光照變化、污漬干擾等復雜場景中展現出更優異的環境適應能力。從技術實現維度劃分,數據驅動的道路損壞檢測體系主要涵蓋三個分支架構:基于全局特征判別的圖像分類模型、聚焦局部損傷定位的目標檢測框架,以及實現像素級解析的語義分割網絡。其中圖像分類模型著重于健全路面與存在損壞路面的宏觀判別;目標檢測系統通過標注框實現多類別裂痕的實例識別;而語義分割技術則通過像素級掩膜生成,精確描繪裂痕的形態學特征。
4、盡管現有的基于深度學習的路面裂痕智能檢測算法,特別是語義分割類算法,已經展現出卓越的性能,但領域中所有公開的算法都不能夠實現檢測性能、模型規模以及模型處理速度的平衡,這限制了這些算法進一步部署到道路自動巡檢車輛/機器人上。在智慧城市數字化進程加速推進的背景下,研究者們需要面對現實挑戰,針對路面損壞智能識別算法在實際應用中遇到的問題,探索算法的優化原理和方法,開發更適用于自動巡檢車輛、機器人部署的路面損壞智能檢測算法,以加速這些算法在數字孿生和智慧城市建設領域的應用步伐。
5、經過檢索,中國發明專利申請公開號cn116758507a公開了一種基于病害圖像采集、分割的道面質量分析方法、裝置及程序,包括以下步驟:汽車啟動;汽車車輪帶動輪速編碼器,觸發工業相機采集路面圖像數據,同時,衛星定位導航系統獲取汽車所在經緯度定位信息,進而將路面圖像數據與定位信息進行一一對應;車內工控機使用路面病害分割模型大型卷積u型網絡結構對路面圖像進行路面病害實時檢測;使用三階段訓練方式進行路面病害分割模型的訓練;使用重參數化技術對大型卷積核u型網絡結構進行部署和推理,得到整體道面缺陷檢測結果;根據檢測結果計算道面狀況指數pci;自動生成道面分析報告,提供道面維修建議。該現有專利申請存在模型規模偏大、對巡檢車輛硬件配置要求過高,以及檢測速度偏慢的問題。
6、如何基于輕量級模型實現路面裂痕實時準確檢測,成為需要解決的技術問題。
技術實現思路
1、本發明的目的就是為了克服上述現有技術存在的缺陷而提供一種輕量級實時路面裂痕智能檢測方法。
2、本發明的目的可以通過以下技術方案來實現:
3、根據本發明的一個方面,提供了一種輕量級實時路面裂痕智能檢測方法,該方法包括以下步驟:
4、步驟1、對獲取的路面圖像進行標準化并轉化為張量;
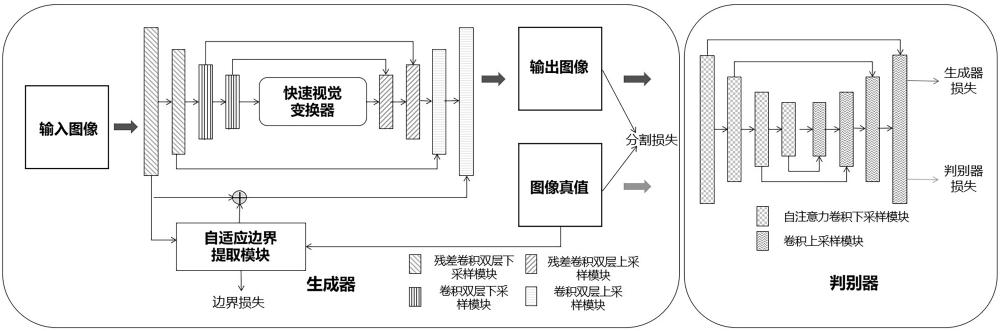
5、步驟2、在訓練階段,用訓練集數據對輕量級生成器網絡進行訓練,所述輕量級生成器網絡包括u型主分割網絡與自適應邊界提取模塊,所述u型主分割網絡包括用于提取局部特征和提升網絡推理速度的第一編碼器,用于提取全局特征的快速視覺變換器,以及第一解碼器;所述自適應邊界提取模塊用于動態捕捉訓練集數據的邊界特征;
6、步驟3、在訓練階段,將輕量級生成器網絡的輸出結果輸入自注意力判別器網絡,從全局和局部兩個層面訓練所述自注意力判別器網絡,以監督輕量級生成網絡的輸出結果,并保存在驗證集上效果最好的模型參數;
7、步驟4、將步驟1處理后的結果輸入到訓練好的u型主分割網絡,并加載保存的模型參數,實時輸出像素級路面裂痕檢測結果;
8、所述的第一編碼器包括兩個殘差卷積雙層下采樣模塊和兩個卷積雙層下采樣模塊,所述的第一解碼器包括兩個殘差卷積雙層上采樣模塊和兩個卷積雙層上采樣模塊。
9、優選地,每個所述殘差卷積雙層下采樣模塊包括第一最大池化層、第一深度可分離卷積層、第一批正則化操作層、第一relu激活層、第二深度可分離卷積層、第二批正則化操作層和第二relu激活層,其中第一個深度可分離卷積層的輸出跨層連接到第二深度可分離卷積層的輸出;
10、每個所述卷積雙層下采樣模塊的結構與所述殘差卷積雙層下采樣模塊類似,其中的卷積層采用標準卷積層。
11、優選地,每個所述的殘差卷積雙層上采樣模塊包括第一雙線性上采樣層、第三深度可分離卷積層、第五批正則化操作層、第五relu激活層、第四深度可分離卷積層、第六批正則化操作層和第六relu激活層,其中第三深度可分離卷積層的輸出跨層連接到第四深度可分離卷積層的輸出;
12、每個所述卷積雙層上采樣模塊的結構與所述殘差卷積雙層上采樣模塊類似,其中的卷積層采用標準卷積層。
13、優選地,所述的快速視覺變換器包括依次連接的空間注意力層、標準卷積層、空間注意力層、通道注意力層、標準卷積層和隨機失活層。
14、優選地,所述的自適應邊界提取模塊包括邊界提取網絡子模塊,訓練約束所述邊界提取網絡子模塊,使得提取的邊界信息與邊界真值圖一致。
15、優選地,所述的自適應邊界提取模塊采用自適應腐蝕與膨脹迭代算法獲取所述邊界真值圖,具體方法包括:
16、首先提取輸入路面圖像張量數據的第一個通道圖像矩陣,并進行數據類型標準化處理;
17、若核半徑未初始化,則執行自適應腐蝕迭代計算自適應半徑值;
18、基于自適應半徑值,使用經驗系數計算核半徑:
19、,
20、其中,round(x)為四舍五入函數,返回與x最接近的整數;max(a,b)為取a和b中的較大值;為自適應半徑值;
21、基于核半徑和曼哈頓距離原理生成菱形核,然后使用該菱形核對原圖像矩陣進行膨脹操作,將膨脹結果與原圖像矩陣作差分運算,得到每個圖像所對應的邊界真值圖。
22、更加優選地,若所述的核半徑已經被初始化,則直接基于最終核半徑和曼哈頓距離原理生成菱形核,然后使用該菱形核對原圖像矩陣進行膨脹操作,將膨脹結果與原圖像矩陣作差分運算,得到每個圖像所對應的邊界真值圖。
23、更加優選地,所述執行自適應腐蝕迭代計算自適應半徑值的過程包括:
24、初始化過程:初始化當前圖像矩陣為原始圖像副本,設定自適應半徑初值為0,并創建橢圓型腐蝕核;
25、腐蝕迭代操作:采用橢圓型腐蝕核對圖像矩陣進行迭代腐蝕操作,每輪迭代后自適應半徑值遞增1,直至圖像矩陣全零化終止迭代。
26、優選地,所述的自注意力判別器網絡為u型結構,包含第二編碼器和第二解碼器兩部分,并通過跳躍連接傳遞信息;
27、所述第二編碼器由四個自注意力卷積下采樣模塊組成,每個所述自注意力卷積下采樣模塊包括依次連接的高效多尺度自注意力層、第二批標準化層和第十relu激活層;
28、所述第二解碼器由四個卷積下采樣模塊組成,每個所述卷積下采樣模塊包括逆卷積層、第三批標準化層和第十一relu激活層。
29、更加優選地,所述自注意力判別器網絡的輸入包括由輕量級生成器網絡的輸出與輸入路面圖像組成的假圖像對,以及由圖像真值與輸入路面圖像組成的真圖像對,通過判別器局部損失和判別器全局損失來訓練所述自注意力判別器網絡,通過與所述輕量級生成器網絡對抗訓練來約束逐像素局部一致性與圖像全局一致性;
30、所述的高效多尺度自注意力層基于跨空間學習,將部分通道維度重塑為批量維度,構建并行網絡,設計局部的跨通道交互,使用跨空間學習方法融合并行網絡的輸出特征圖。
31、與現有技術相比,本發明具有以下有益效果:
32、(1)本發明的輕量級生成器網絡通過u型主分割網絡提取全局特征和局部特征,通過自適應邊界提取模塊動態捕捉邊界特征,并結合輕量級生成器網絡從全局和局部兩個層面監督輕量級生成網絡的輸出結果,具有的輕量化、高性能、高實時性的特質,有效克服了現有技術無法平衡檢測性能、模型規模以及模型處理速度的困難,使其適用于智能巡檢車輛車載部署,實現實時精確的全自動化智能路面裂痕檢測。
33、(2)本發明的u型主分割網絡包括殘差卷積雙層下采樣模塊與殘差卷積雙層上采樣模塊,在基于卷積神經網絡提取輸入圖像的局部特征同時,雙層采樣進一步提升了網絡的推理速度;快速視覺變換器在提取輸入圖像的全局特征同時,還能夠提升網絡的推理速度,該輕量網絡進一步提高了路面裂痕的實時性和檢測性能。
34、(3)本發明的自適應邊界提取模塊通過自適應腐蝕與膨脹迭代算法與邊界提取網絡子模塊,實現了對裂痕輪廓特征的動態捕捉,增強了u型主分割網絡對裂痕邊界特征的學習能力,能夠有效應對不同形態與粗細的裂痕,提高了網絡檢測的精確性和魯棒性。
35、(4)本發明設計了一個自注意力判別器網絡,采用自注意力卷積下采樣模塊來增強對輸入圖像對的特征提取能力,以增強判別器網絡的判別能力,并設計局部判別損失與全局判別損失,實現了對由u型主分割網絡和自適應邊界提取模塊組成的輕量級生成器網絡進行高維度監督,進一步提升了主分割網絡的裂痕檢測性能。
36、(5)本發明使用公開數據集udtiri-crack和deepcrack上進行了實驗,實驗結果表明,和現有公開的裂痕檢測算法相比,本方法在檢測性能和推理速度方面都實現了最佳。
- 還沒有人留言評論。精彩留言會獲得點贊!