尺寸測量方法、裝置、設備及存儲介質與流程
本技術涉及工業測量,尤其涉及尺寸測量方法、裝置、設備及存儲介質。
背景技術:
1、在工業生產中,產品尺寸的精確測量至關重要,目前,用于測量產品尺寸的常用方式是使用接觸式量具,例如,卡尺、千分尺等,使用接觸式量具測量產品尺寸的效率較低,且容易受到人為因素的影響,測量精度有限,為此,部分員工還會使用現有的光學測量設備,但是,該光學測量設備在使用過程中存在操作和人員依賴方面的,例如,僅能一人操作一臺設備,這極大地限制了測量效率,在需要進行大批量測量任務時,難以滿足快速生產的需求,另外,光學測量設備的傳統使用方式是需要純手動取點的,也會受到主觀因素的影響,且不同員工的操作習慣和技能水平存在差異,這可能導致取點位置不準確,進而影響測量結果的準確性。因此,上述方式測量產品尺寸的效率和精度較低。
2、上述內容僅用于輔助理解本技術的技術方案,并不代表承認上述內容是現有技術。
技術實現思路
1、本技術的主要目的在于提供一種尺寸測量方法、裝置、設備及存儲介質,旨在解決現有技術測量產品尺寸的效率和精度較低的技術問題。
2、為實現上述目的,本技術提出一種尺寸測量方法,所述方法包括:
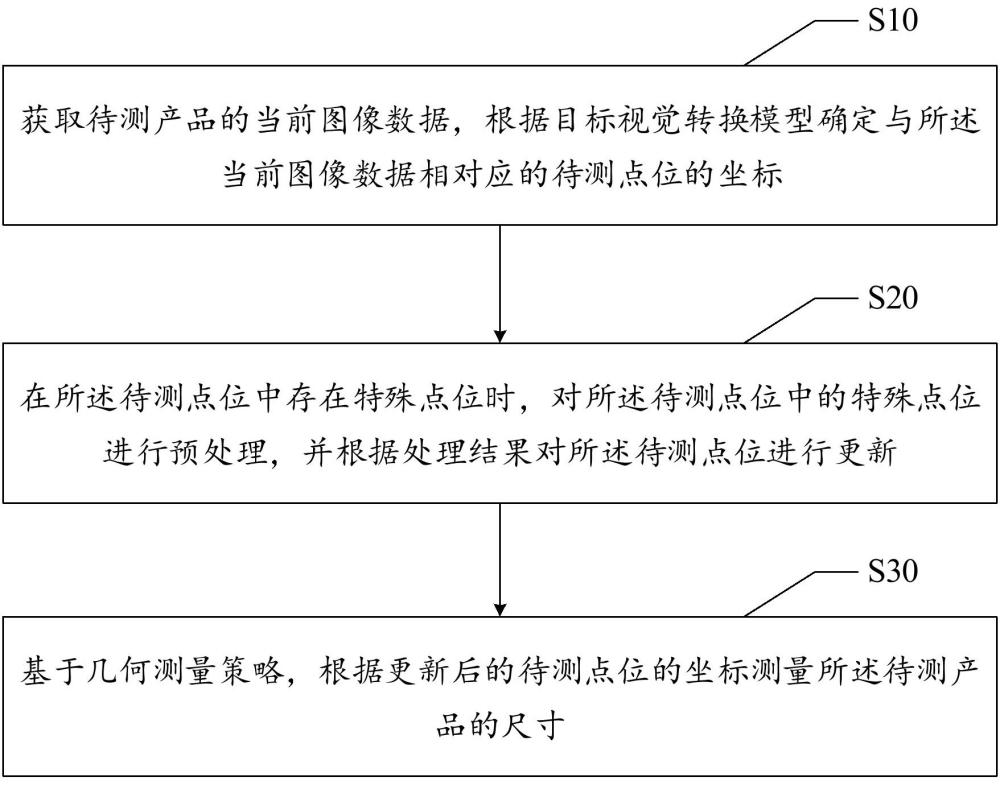
3、獲取待測產品的當前圖像數據,根據目標視覺轉換模型確定與所述當前圖像數據相對應的待測點位的坐標;
4、在所述待測點位中存在特殊點位時,對所述待測點位中的特殊點位進行預處理,并根據處理結果對所述待測點位進行更新;
5、基于幾何測量策略,根據更新后的待測點位的坐標測量所述待測產品的尺寸。
6、在一實施例中,所述獲取待測產品的當前圖像數據,根據目標視覺轉換模型確定與所述當前圖像數據相對應的待測點位的坐標的步驟,包括:
7、獲取待測產品的基本屬性數據,并根據所述基本屬性數據設置光學測量設備的光學參數;
8、基于設置光學參數后的光學測量設備采集待測產品的當前圖像數據;
9、基于目標圖像標注工具對所述當前圖像數據進行標注;
10、根據標注在所述當前圖像數據上的標簽和目標視覺轉換模型確定與所述當前圖像數據相對應的待測點位的坐標。
11、在一實施例中,所述根據標注在所述當前圖像數據上的標簽和目標視覺轉換模型確定與所述當前圖像數據相對應的待測點位的坐標的步驟,包括:
12、根據目標視覺轉換模型所支持的數據格式對標注在所述當前圖像數據上的標簽進行格式轉換,并對轉換后的標簽進行編碼;
13、將編碼后的標簽與所述當前圖像數據進行關聯,對關聯的當前數據進行裁剪,得到目標關聯數據;
14、將所述目標關聯數據傳輸至目標人工智能服務設備;
15、接收所述目標人工智能服務設備根據目標視覺轉換模型和所述目標關聯數據推理并反饋的與當前圖像數據相對應的待測點位的坐標。
16、在一實施例中,所述將所述目標關聯數據傳輸至目標人工智能服務設備的步驟之前,還包括:
17、控制測試設備與目標人工智能服務設備連接至同一局域網內,并配置連接后的測試設備與目標人工智能服務設備的網絡參數;
18、基于目標通信協議分別在配置后的測試設備與目標人工智能服務設備上安裝通信驅動程序和軟件接口;
19、對所述目標關聯數據進行封裝,得到關聯數據包;
20、基于所述目標通信協議將所述關聯數據包傳輸至配置后的目標人工智能服務設備。
21、在一實施例中,所述根據目標視覺轉換模型確定與所述當前圖像數據相對應的待測點位的坐標的步驟之前,還包括:
22、獲取模型訓練樣本數據,并對所述模型訓練樣本數據中的圖像數據進行劃分;
23、將劃分后的圖像數據進行平鋪,基于線性變換層對平鋪后的一維圖像數據進行變換;
24、基于位置嵌入層為變換后的圖像數據添加目標位置信息,得到目標序列數據;
25、基于目標編碼層和預測頭,根據所述目標序列數據確定圖像特征向量;
26、根據所述圖像特征向量和模型訓練樣本數據中的點位坐標訓練目標視覺轉換模型。
27、在一實施例中,所述在所述待測點位中存在特殊點位時,對所述待測點位中的特殊點位進行預處理,并根據處理結果對所述待測點位進行更新的步驟,包括:
28、對待測點位進行點位號識別,得到當前識別結果;
29、在根據所述當前識別結果確定所述待測點位中存在特殊點位時,獲取所述待測點位中的特殊點位的類型;
30、根據所述類型確定特殊點位處理策略;
31、根據所述特殊點位處理策略對所述待測點位中的特殊點位進行預處理,并根據處理結果對所述待測點位進行更新。
32、在一實施例中,所述基于幾何測量策略,根據更新后的待測點位的坐標測量所述待測產品的尺寸的步驟之后,還包括:
33、獲取設備標準尺寸范圍,在所述待測產品的尺寸位于所述設備標準尺寸范圍時,確定所述待測產品合格;
34、經過預設次數的迭代測量后,根據目標統計指標獲取迭代測量結果;
35、對所述迭代測量結果進行評估;
36、在評估結果不滿足預設要求時,發出預警提示信息。
37、此外,為實現上述目的,本技術還提出一種尺寸測量裝置,所述尺寸測量裝置包括:
38、確定模塊,用于獲取待測產品的當前圖像數據,根據目標視覺轉換模型確定與所述當前圖像數據相對應的待測點位的坐標;
39、處理模塊,用于在所述待測點位中存在特殊點位時,對所述待測點位中的特殊點位進行預處理,并根據處理結果對所述待測點位進行更新;
40、測量模塊,用于基于幾何測量策略,根據更新后的待測點位的坐標測量所述待測產品的尺寸。
41、此外,為實現上述目的,本技術還提出一種尺寸測量設備,所述設備包括:存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述計算機程序配置為實現如上文所述的尺寸測量方法的步驟。
42、此外,為實現上述目的,本技術還提出一種存儲介質,所述存儲介質為計算機可讀存儲介質,所述存儲介質上存儲有計算機程序,所述計算機程序被處理器執行時實現如上文所述的尺寸測量方法的步驟。
43、本技術提出的一個或多個技術方案,至少具有以下技術效果:通過獲取待測產品的當前圖像數據,根據目標視覺轉換模型確定與所述當前圖像數據相對應的待測點位的坐標;在所述待測點位中存在特殊點位時,對所述待測點位中的特殊點位進行預處理,并根據處理結果對所述待測點位進行更新;基于幾何測量策略,根據更新后的待測點位的坐標測量所述待測產品的尺寸。通過上述方式,在利用光學測量設備采集待測產品的當前圖像數據后,基于目標人工智能服務設備根據目標視覺轉換模型確定待測點位的坐標,并判斷待測點位中是否存在特殊點位,若是,則基于幾何測量策略測量待測產品的尺寸,從而能夠有效提高測量產品尺寸的效率和精度,確保測量結果的可靠性,為生產過程中的質量控制和決策提供有力支持。
- 還沒有人留言評論。精彩留言會獲得點贊!