一種車位檢測方法與一種車位檢測系統與流程
本發明涉及汽車傳感領域,尤其涉及一種車位檢測方法與一種車位檢測系統。
背景技術:
1、隨著汽車科技的不斷進步和消費者對智能化、安全性需求的提高,自動泊車系統已經逐漸從概念變為現實,并成為了自動駕駛領域的重要組成部分。自動泊車系統能夠顯著提高停車效率,大大縮短停車時間,降低駕駛員的操作難度和疲勞度。同時,自動泊車系統能夠減少因人為因素導致的停車事故,提高停車安全性,保護乘客和車輛的安全。因此,自動泊車系統在自動駕駛行業中具有廣泛的應用前景和巨大的市場潛力。車位檢測是自動泊車系統技術的重要組成部分之一,對于實現全自動泊車功能具有不可或缺的作用。面對復雜多變的真實場景,多種傳感器為自動泊車系統融合提供了較為全面的環境信息。
2、自動泊車系統最關鍵的問題是找到空置的停車位。
3、典型的方法是在攝像頭圖像上基于計算機視覺的方法檢測出地面上已經存在的車位線,然后識別其是否被占用。但是,一些停車場不會為用戶繪制車位線,只是將空置場地宣布為可用停車位。同時,在舊停車場中,一些停車位線存在嚴重磨損。
4、另一個典型方法是結合超聲波雷達和攝像頭的車位檢測方法,在該方法中超聲波雷達被用于檢測障礙物和自車的距離信息,為基于攝像頭的車位檢測算法提供信息輔助,但是超聲波雷達的測距精度有限。相比之下,基于毫米波雷達的車位檢測方法能在一定程度上緩解上述痛點,并且將攝像頭和毫米波雷達的檢測結果融合后能獲得更加準確的車位檢測結果。通常采用深度學習方式得到的權重對車位進行確定,其精度較低且數據采集、存儲、模型訓練的投入成本很高。
5、因此,如何開發一種車位檢測方法,能夠更加準確的停車位點坐標信息,為惡劣天氣、光照強度低、車位線磨損或缺失等情況下的自動泊車系統提供較為準確的車位檢測結果,成為本領域技術人員亟需解決的技術問題。
技術實現思路
1、為了克服上述技術缺陷,本發明的目的在于提供一種車位檢測方法與一種車位檢測系統。通過融合陽光雨量傳感器檢測的亮度和濕度等融合參數對攝像頭和毫米波雷達檢測的車位點坐標進行融合,進行目標車位檢測,能夠解決在惡劣天氣、夜晚條件、車位線缺失或磨損時車位無法識別或檢測精度低的問題;精度更高,成本更低。
2、本發明公開了一種車位檢測方法,包括:
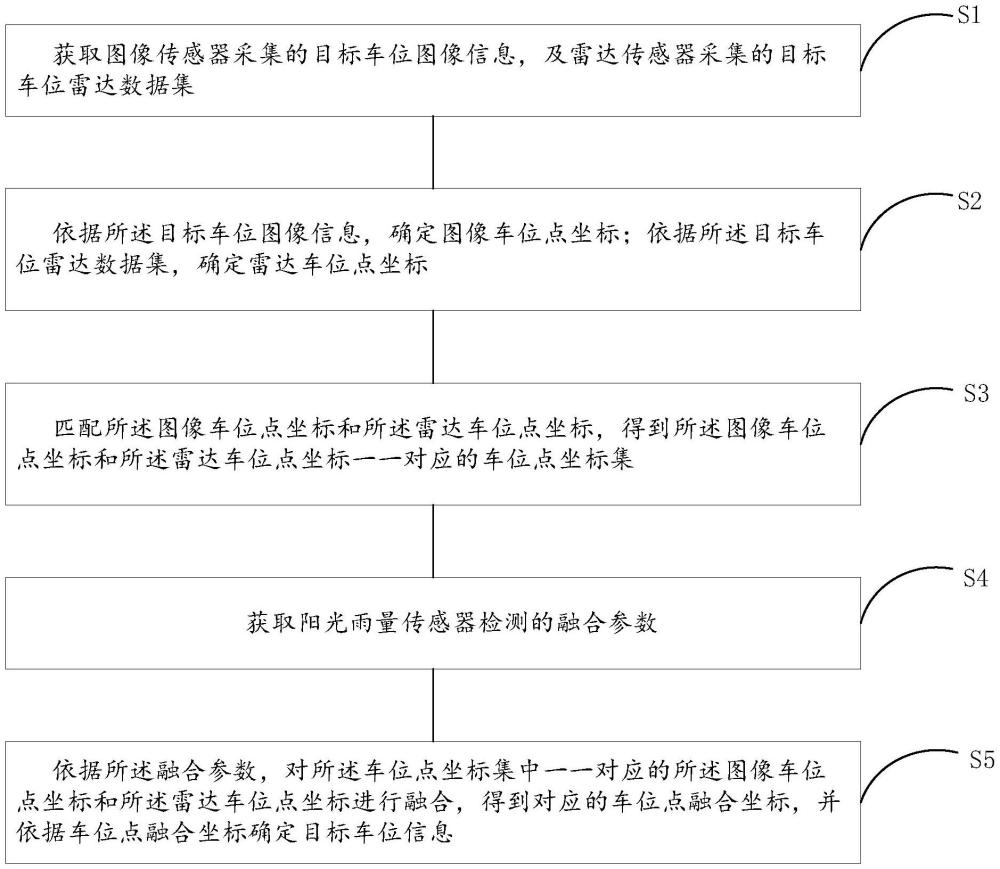
3、獲取圖像傳感器采集的目標車位圖像信息,及雷達傳感器采集的目標車位雷達數據集;
4、依據所述目標車位圖像信息,確定圖像車位點坐標;依據所述目標車位雷達數據集,確定雷達車位點坐標;
5、匹配所述圖像車位點坐標和所述雷達車位點坐標,得到所述圖像車位點坐標和所述雷達車位點坐標一一對應的車位點坐標集;
6、獲取當前陽光雨量傳感器檢測的融合參數;
7、依據所述融合參數,對所述車位點坐標集中一一對應的所述圖像車位點坐標和所述雷達車位點坐標進行融合,得到對應的車位點融合坐標,并依據車位點融合坐標確定目標車位信息。
8、可選的,所述圖像車位點坐標和所述雷達車位點坐標均為車位角點坐標。
9、可選的,所述融合參數包括環境濕度與環境亮度。
10、可選的,依據所述融合參數,對所述車位點坐標集中一一對應的所述圖像車位點坐標和所述雷達車位點坐標進行融合,得到對應的車位點融合坐標的步驟,包括:
11、依據所述環境濕度s與所述環境亮度l,通過式(1)對一一對應的所述圖像車位點坐標和所述雷達車位點坐標進行融合,得到車位點融合坐標
12、
13、其中,{i=1,2,3,4…}。
14、可選的,獲取四組所述圖像車位點坐標和對應的四組所述雷達車位點坐標組成所述車位點坐標集;
15、依據所述融合參數,對所述車位點坐標集中一一對應的所述圖像車位點坐標和所述雷達車位點坐標進行融合,得到對應的車位點融合坐標的步驟,包括:
16、依據所述環境濕度s與所述環境亮度l、所述車位點坐標集中的圖像車位點坐標和一一對應的雷達車位點坐標依據式(1),將i分別取值:1、2、3、4,計算得到四組車位點融合坐標。
17、本發明還公開了一種車位檢測系統,包括:
18、傳感器模塊、車位點坐標計算模塊、車位點匹配模塊、陽光雨量傳感器及車位點融合模塊;
19、所述傳感模塊包括:雷達傳感器、圖像傳感器;所述雷達傳感器用于采集目標車位圖像信息,所述圖像傳感器用于采集目標車位雷達數據集;
20、所述車位點坐標計算模塊,用于獲取所述目標車位雷達數據集,并依據所述目標車位雷達數據集,確定雷達車位點坐標;以及用于獲取所述目標車位圖像信息,并依據所述目標車位圖像信息,確定圖像車位點坐標;
21、所述車位點匹配模塊,用于獲取并匹配所述圖像車位點坐標和所述雷達車位點坐標,得到所述圖像車位點坐標和所述雷達車位點坐標一一對應的車位點坐標集;
22、所述陽光雨量傳感器,用于檢測并獲取當前融合參數;
23、所述車位點融合模塊,用于獲取所述融合參數和所述車位點坐標集,并依據所述融合參數,對所述車位點坐標集中一一對應的所述圖像車位點坐標和所述雷達車位點坐標進行融合,得到對應的車位點融合坐標,并依據車位點融合坐標確定目標車位信息。
24、可選的,所述車位點坐標計算模塊包括;
25、毫米波雷達車位點坐標計算模塊,用于所述目標車位雷達數據集,并依據所述目標車位雷達數據集,確定雷達車位點坐標;
26、圖像車位點坐標計算模塊;用于獲取所述目標車位圖像信息,并依據所述目標車位圖像信息,確定圖像車位點坐標。
27、可選的,所述圖像車位點坐標和所述雷達車位坐均為車位角點坐標。
28、可選的,所述陽光雨量傳感器,用于獲取融合參數:環境濕度s與環境亮度l;
29、所述車位點融合模塊,用于依據所述環境濕度s與所述環境亮度l,通過式(1)對一一對應的所述圖像車位點坐標和所述雷達車位點坐標進行融合,得到車位點融合坐標
30、
31、其中,{i=1,2,3,4…}。
32、可選的,毫米波雷達車位點坐標計算模塊,用于檢測并確定四組所述雷達車位點坐標;
33、圖像車位點坐標計算模塊,用于檢測并確定四組所述圖像車位點坐標;
34、所述車位點匹配模塊,用于獲取并匹配四組所述圖像車位點坐標和四組所述雷達車位點坐標,得到所述圖像車位點坐標和所述雷達車位點坐標一一對應的車位點坐標集;
35、所述車位點融合模塊,用于獲取所述融合參數和所述車位點坐標集,依據所述融合參數,對所述車位點坐標集中一一對應的所述圖像車位點坐標和所述雷達車位點坐標進行融合,得到對應的車位點融合坐標的步驟,包括:
36、依據所述環境濕度s與所述環境亮度l、所述車位點坐標集中的圖像車位點坐標和一一對應的雷達車位點坐標依據式(1),將i分別取值:1、2、3、4,計算得到四組車位點融合坐標。
37、采用了上述技術方案后,與現有技術相比,具有以下有益效果:
38、1.本發明通過融合陽光雨量傳感器檢測的亮度和濕度等融合參數對攝像頭和毫米波雷達檢測的車位點坐標進行融合,進行目標車位檢測,能夠解決在惡劣天氣、夜晚條件、車位線缺失或磨損時車位無法識別或檢測精度低的問題。
39、2.相對于現有的機器學習的方法,精度更高,成本更低。
- 還沒有人留言評論。精彩留言會獲得點贊!