非線性降階無源觀測器的管理方法、裝置、設備、存儲介質及計算機產品
本申請涉及電機設計,尤其涉及一種非線性降階無源觀測器的管理方法、裝置、設備、存儲介質及計算機產品。
背景技術:
1、現有的無傳感器控制一般通過測量電機的電壓和電流,利用電機的數學模型來估算反電動勢,進而得到轉子位置和速度信息,利用滑模觀測器計算電機的角度和速度,由于其特殊結構,滑模觀測器的控制作用在切換面上不連續,這會導致系統狀態在滑模面附近產生高頻抖振現象。抖振不僅會使觀測值出現波動,影響觀測精度,還可能激發系統的未建模動態,導致系統不穩定。
2、電機的參數在運行過程中可能會發生變化,如電阻、電感等參數的漂移,以及負載的突然變化等,都會影響無傳感器控制的性能,降低轉子位置和速度估計的準確性和系統的穩定性,且傳統全階觀測器設計復雜,計算難度大。
技術實現思路
1、本申請目的在于提供一種非線性降階無源觀測器的管理方法、裝置、設備、存儲介質及計算機產品,旨在解決傳統滑模觀測器在滑模面附近產生高頻抖振現象導致滑模觀測器對電機參數敏感,降低了轉子位置和速度估計的準確性的技術問題。
2、為實現上述目的,本申請提出一種非線性降階無源觀測器的管理方法,所述非線性降階無源觀測器的管理方法應用于永磁同步電機無傳感控制系統,所述方法包括:
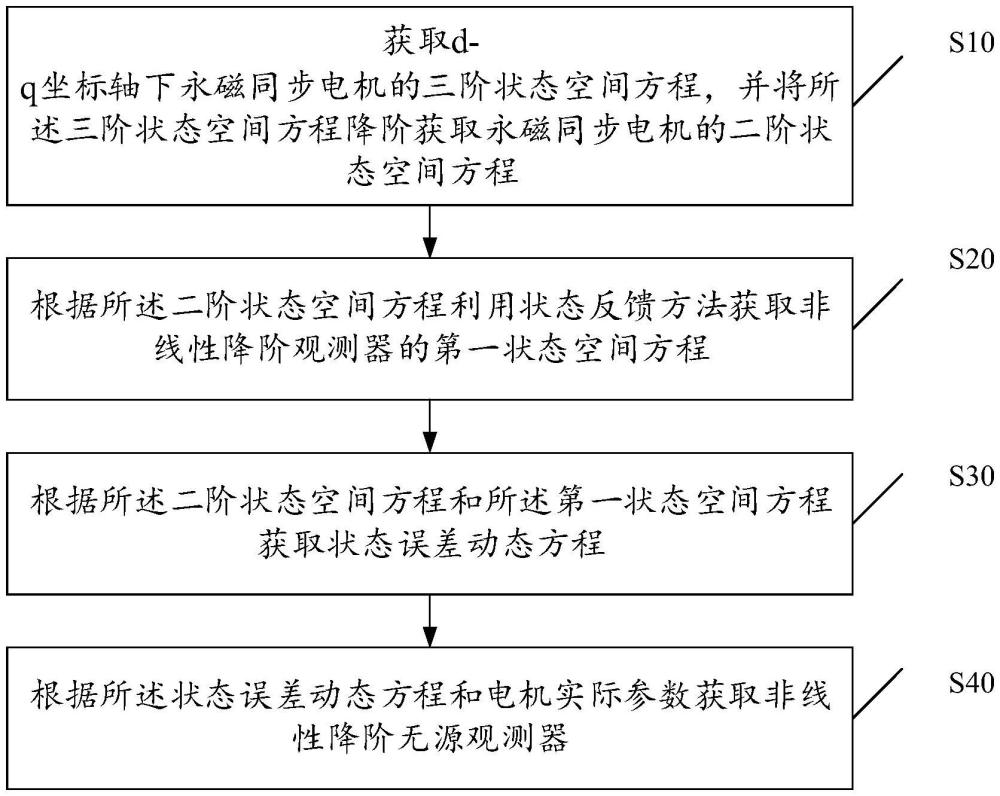
3、獲取d-q坐標軸下永磁同步電機的三階狀態空間方程,并將所述三階狀態空間方程降階獲取永磁同步電機的二階狀態空間方程;
4、根據所述二階狀態空間方程利用狀態反饋方法獲取非線性降階觀測器的第一狀態空間方程;
5、根據所述二階狀態空間方程和所述第一狀態空間方程獲取狀態誤差動態方程;
6、根據所述狀態誤差動態方程和電機實際參數獲取非線性降階無源觀測器。
7、在一實施例中,所述獲取d-q坐標軸下永磁同步電機的三階狀態空間方程,并將所述三階狀態空間方程降階獲取永磁同步電機的二階狀態空間方程的步驟,包括:
8、獲取d-q坐標軸下永磁同步電機的三階狀態空間方程;
9、將所述三階狀態空間方程中d坐標軸上的定子電壓和定子電流置為零獲取永磁同步電機的二階狀態空間方程。
10、在一實施例中,所述獲取d-q坐標軸下永磁同步電機的三階狀態空間方程的步驟,包括:
11、獲取所述永磁同步電機的電壓方程和運動方程;
12、將所述電壓方程和所述運動方程組合成所述三階狀態空間方程。
13、在一實施例中,所述根據所述二階狀態空間方程和所述第一狀態空間方程獲取狀態誤差動態方程的步驟,包括:
14、獲取所述二階狀態空間方程和所述第一狀態空間方程的差值方程;
15、將所述差值方程作為所述狀態誤差動態方程。
16、在一實施例中,所述根據所述狀態誤差動態方程和電機實際參數獲取非線性降階無源觀測器的步驟,包括:
17、獲取所述狀態誤差動態方程的第一系數矩陣;
18、根據所述第一系數矩陣對角矩陣特性獲取所述狀態誤差動態方程的誤差反饋系數矩陣;
19、根據所述電機實際參數及所述誤差反饋系數矩陣獲取非線性降階無源觀測器。
20、在一實施例中,所述根據所述狀態誤差動態方程和電機實際參數獲取非線性降階無源觀測器的步驟之后,包括:
21、在不同轉速工況下仿真所述非線性降階無源觀測器;
22、獲取所述非線性降階無源觀測器在所述不同轉速工況的仿真圖形;
23、根據所述仿真圖形判斷所述非線性降階無源觀測器的轉速跟隨性。
24、此外,為實現上述目的,本申請還提出一種非線性降階無源觀測器的管理裝置,所述裝置包括:
25、方程降階模塊,用于獲取d-q坐標軸下永磁同步電機的三階狀態空間方程,并將所述三階狀態空間方程降階獲取永磁同步電機的二階狀態空間方程;
26、降階獲取模塊,用于根據所述二階狀態空間方程利用狀態反饋方法獲取非線性降階觀測器的第一狀態空間方程;
27、誤差獲取模塊,用于根據所述二階狀態空間方程和所述第一狀態空間方程獲取狀態誤差動態方程;
28、無源獲取模塊,用于根據所述狀態誤差動態方程和電機實際參數獲取非線性降階無源觀測器。
29、此外,為實現上述目的,本申請還提出一種非線性降階無源觀測器的管理設備,所述設備包括:存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述計算機程序配置為實現如上所述的非線性降階無源觀測器的管理方法的步驟。
30、此外,為實現上述目的,本申請還提出一種存儲介質,所述存儲介質為計算機可讀存儲介質,所述存儲介質上存儲有計算機程序,所述計算機程序被處理器執行時實現如上所述的非線性降階無源觀測器的管理方法的步驟。
31、此外,為實現上述目的,本申請還提出一種計算機程序產品,所述計算機程序產品包括計算機程序,所述計算機程序被處理器執行時實現如上所述的非線性降階無源觀測器的管理方法。
32、本申請提出一種非線性降階無源觀測器的管理方法,所述非線性降階無源觀測器的管理方法應用于永磁同步電機無傳感控制系統,所述方法包括:獲取d-q坐標軸下永磁同步電機的三階狀態空間方程,并將所述三階狀態空間方程降階獲取永磁同步電機的二階狀態空間方程;根據所述二階狀態空間方程利用狀態反饋方法獲取非線性降階觀測器的第一狀態空間方程;根據所述二階狀態空間方程和所述第一狀態空間方程獲取狀態誤差動態方程;根據所述狀態誤差動態方程和電機實際參數獲取非線性降階無源觀測器。通過基于雙閉環永磁同步電機矢量控制系統,同時在非線性觀測器的設計中通過降階減小計算量規避d-q軸電流的耦合問題,將非線性降階無源觀測器應用于永磁同步電機無傳感控制系統,代替傳統旋變等物理觀測器,減小硬件成本和維護成本、提高了系統的可靠性。
技術特征:
1.一種非線性降階無源觀測器的管理方法,其特征在于,所述非線性降階無源觀測器的管理方法應用于永磁同步電機無傳感控制系統,所述方法包括:
2.如權利要求1所述的非線性降階無源觀測器的管理方法,其特征在于,所述獲取d-q坐標軸下永磁同步電機的三階狀態空間方程,并將所述三階狀態空間方程降階獲取永磁同步電機的二階狀態空間方程的步驟,包括:
3.如權利要求2所述的非線性降階無源觀測器的管理方法,其特征在于,所述獲取d-q坐標軸下永磁同步電機的三階狀態空間方程的步驟,包括:
4.如權利要求1所述的非線性降階無源觀測器的管理方法,其特征在于,所述根據所述二階狀態空間方程和所述第一狀態空間方程獲取狀態誤差動態方程的步驟,包括:
5.如權利要求1所述的非線性降階無源觀測器的管理方法,其特征在于,所述根據所述狀態誤差動態方程和電機實際參數獲取非線性降階無源觀測器的步驟,包括:
6.如權利要求1所述的非線性降階無源觀測器的管理方法,其特征在于,所述根據所述狀態誤差動態方程和電機實際參數獲取非線性降階無源觀測器的步驟之后,包括:
7.一種非線性降階無源觀測器的管理裝置,其特征在于,所述裝置包括:
8.一種非線性降階無源觀測器的管理設備,其特征在于,所述設備包括:存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述計算機程序配置為實現如權利要求1至6中任一項所述的非線性降階無源觀測器的管理方法的步驟。
9.一種存儲介質,其特征在于,所述存儲介質為計算機可讀存儲介質,所述存儲介質上存儲有計算機程序,所述計算機程序被處理器執行時實現如權利要求1至6中任一項所述的非線性降階無源觀測器的管理方法的步驟。
10.一種計算機程序產品,其特征在于,所述計算機程序產品包括計算機程序,所述計算機程序被處理器執行時實現如權利要求1至6中任一項所述的非線性降階無源觀測器的管理方法。
技術總結
本申請涉及電機設計技術領域,公開了一種非線性降階無源觀測器的管理方法、裝置、設備、存儲介質及計算機產品,包括:獲取d?q坐標軸下永磁同步電機的三階狀態空間方程,并將所述三階狀態空間方程降階獲取永磁同步電機的二階狀態空間方程;根據所述二階狀態空間方程利用狀態反饋方法獲取非線性降階觀測器的第一狀態空間方程;根據所述二階狀態空間方程和所述第一狀態空間方程獲取狀態誤差動態方程;根據所述狀態誤差動態方程和電機實際參數獲取非線性降階無源觀測器。通過在非線性觀測器的設計中通過降階減小計算量規避d?q軸電流的耦合問題,將非線性降階無源觀測器應用于永磁同步電機無傳感控制系統,提高了系統的可靠性。
技術研發人員:馬強,蒲俊
受保護的技術使用者:湖北文理學院
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!