一種空間正交壓扭耦合柔性壓電粘滑驅(qū)動器及其驅(qū)動方法與流程
本發(fā)明涉及微納精密驅(qū)動與定位,具體指一種空間正交壓扭耦合柔性壓電粘滑驅(qū)動器及其驅(qū)動方法。
背景技術(shù):
1、壓電粘滑驅(qū)動器作為壓電驅(qū)動技術(shù)的一種重要形式,依托于壓電材料的逆壓電效應(yīng),展現(xiàn)出了卓越的性能特征,包括高定位精確度、快速響應(yīng)時間、亞納米級分辨率以及強大的驅(qū)動力輸出能力,這些特性使其在掃描探針顯微鏡、微型納米機器人技術(shù)、自適應(yīng)光學(xué)系統(tǒng)以及微納測量平臺等尖端科技領(lǐng)域扮演著不可或缺的角色。壓電驅(qū)動器的設(shè)計靈活多樣,涵蓋了直接驅(qū)動型、慣性驅(qū)動型以及尺蠖型等多種類型,而壓電粘滑驅(qū)動器以其結(jié)構(gòu)設(shè)計的相對簡潔性、操作的便捷性以及輸出性能的穩(wěn)定性在眾多類型中脫穎而出。
2、壓電粘滑驅(qū)動機制采用了鋸齒狀激勵電信號對壓電元件進行激勵,這種激勵方式使得定子能夠產(chǎn)生快速與慢速交替的運動變形,從而精心調(diào)控定子與動子在“粘著”與“滑動”兩種運動模態(tài)間的轉(zhuǎn)換。在這個過程中,摩擦力的巧妙運用是實現(xiàn)動子機械運動精準(zhǔn)輸出的關(guān)鍵。然而,現(xiàn)有的壓電粘滑驅(qū)動器在“滑動”階段面臨的一個主要挑戰(zhàn)是摩擦力較大,這不僅導(dǎo)致了機構(gòu)的回退現(xiàn)象,還限制了驅(qū)動速度的提升,使得在高速驅(qū)動方面的性能難以迅速達到理想狀態(tài)。
技術(shù)實現(xiàn)思路
1、為此,本發(fā)明所要解決的技術(shù)問題在于克服現(xiàn)有技術(shù)中壓電粘滑驅(qū)動器易回退的問題,提供一種空間正交壓扭耦合柔性壓電粘滑驅(qū)動器及其驅(qū)動方法。
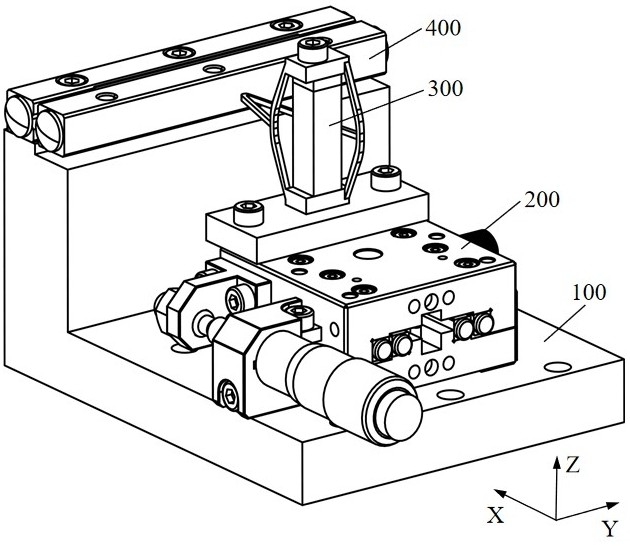
2、為解決上述技術(shù)問題,本發(fā)明提供了一種空間正交壓扭耦合柔性壓電粘滑驅(qū)動器,其包括:固定底座;定子,所述定子包括壓電疊堆以及柔性驅(qū)動組件,其中,所述壓電疊堆連接于所述固定底座上,其通過驅(qū)動電信號升降移動,所述柔性驅(qū)動組件包括第一鉸鏈、第二鉸鏈以及第三鉸鏈,其中,所述第一鉸鏈與所述第二鉸鏈以所述壓電疊堆為中心對稱設(shè)置,所述第一鉸鏈及所述第二鉸鏈均配置為兩端連接于所述壓電疊堆,且中部朝向遠(yuǎn)離所述壓電疊堆方向凸出設(shè)置的結(jié)構(gòu),所述第三鉸鏈包括相互連接的第一連接部以及第二連接部,所述第一連接部連接于所述第一鉸鏈,所述第二連接部連接于所述第二鉸鏈,所述第一連接部與所述第二連接部的相接處形成驅(qū)動足,所述驅(qū)動足通過所述壓電疊堆沿第一方向和/或第二方向移動;動子,所述動子包括固定導(dǎo)軌以及移動導(dǎo)軌,所述固定導(dǎo)軌連接于所述固定底座,所述移動導(dǎo)軌可與所述驅(qū)動足接觸,且通過所述驅(qū)動足沿第二方向移動。
3、在本發(fā)明的一個實施例中,所述第一鉸鏈所在曲面的曲率半徑與所述第二鉸鏈所在曲面的曲率半徑相同,且均為r;所述第一鉸鏈兩端在第三方向上的間隔距離與所述第一鉸鏈兩端在第三方向上的間隔距離相同,且均為l;所述柔性驅(qū)動組件軸向剛度分布∝l/r,其中,1<l/r<10。
4、在本發(fā)明的一個實施例中,所述第一連接部與所述第二連接部所形成的銳角為α,且30°<α<60°。
5、在本發(fā)明的一個實施例中,所述驅(qū)動足在第三方向上的厚度小于所述移動導(dǎo)軌在第三方向上的厚度,以提高所述驅(qū)動足與所述動子之間的有效接觸面積。
6、在本發(fā)明的一個實施例中,所述定子還包括連接組件,所述連接組件包括裝配主體、預(yù)緊墊片以及調(diào)節(jié)件,所述裝配主體設(shè)置于所述壓電疊堆兩端,所述第一鉸鏈及所述第二鉸鏈的兩端均連接于所述裝配主體,所述預(yù)緊墊片設(shè)置于所述壓電疊堆及所述裝配主體之間,所述調(diào)節(jié)件穿設(shè)連接所述裝配主體、所述預(yù)緊墊片以及所述壓電疊堆以調(diào)節(jié)所述壓電疊堆的軸向預(yù)緊力。
7、在本發(fā)明的一個實施例中,所述空間正交壓扭耦合柔性壓電粘滑驅(qū)動器還包括預(yù)緊機構(gòu),所述預(yù)緊機構(gòu)包括:基座,所述基座連接于所述固定底座,其上設(shè)有至少一個調(diào)節(jié)導(dǎo)軌,所述至少一個調(diào)節(jié)導(dǎo)軌沿第一方向延伸;移動平臺,所述移動平臺滑動連接于所述基座,且與所述定子固定連接。
8、在本發(fā)明的一個實施例中,所述預(yù)緊機構(gòu)還包括調(diào)節(jié)螺旋桿以及緊固螺釘,所述調(diào)節(jié)螺旋桿設(shè)置于所述基座上,且與所述移動平臺螺紋連接,以調(diào)節(jié)所述移動平臺及所述基座的相對位置,所述緊固螺釘可穿設(shè)固定所述基座及所述移動平臺。
9、在本發(fā)明的一個實施例中,所述固定底座包括相互垂直連接的第一安裝部以及第二安裝部,其中,所述第一安裝部沿水平方向延伸,其上連接所述定子,所述第二安裝部設(shè)置于所述第一安裝部一側(cè),其頂部包括連接臺面及避讓臺階,其中,所述連接臺面與所述固定導(dǎo)軌可拆卸地連接,所述避讓臺階由所述連接臺面向下凹陷,所述移動導(dǎo)軌在所述避讓臺階上方移動,且與所述避讓臺階間隔設(shè)置。
10、本發(fā)明還提供一種空間正交壓扭耦合柔性壓電粘滑驅(qū)動器驅(qū)動方法,其用以上述的空間正交壓扭耦合柔性壓電粘滑驅(qū)動器進行粘滑驅(qū)動過程,其包括:步驟s1、裝配連接定子和動子,使所述定子與所述動子接觸;步驟s2、向壓電疊堆輸入均勻增加的電壓信號,使驅(qū)動壓電疊堆沿其高度方向伸展,同時通過柔性驅(qū)動組件將所述壓電疊堆的升降移動趨勢轉(zhuǎn)化為驅(qū)動足沿動子表面的水平移動趨勢,以驅(qū)動所述動子移動;步驟s3、在所述電壓信號達到最大時,使所述驅(qū)動足收縮直至其脫離所述動子表面,以抑制動子回退;步驟s4、向所述壓電疊堆輸入均勻減小的電壓信號,使所述壓電疊堆恢復(fù)初始位置,且所述驅(qū)動足與所述動子表面重新接觸;步驟s5、重復(fù)步驟s3至步驟s4,以驅(qū)動所述動子連續(xù)移動。
11、在本發(fā)明的一個實施例中,步驟s2至步驟s5中的電壓信號為鋸齒波形電壓信號,所述電壓信號波動周期t在0.001~1.000s之間,所述電壓信號強度在60~120v之間,所述鋸齒波形電壓信號對稱性在50.00~99.99%之間。
12、本發(fā)明的上述技術(shù)方案相比現(xiàn)有技術(shù)具有以下優(yōu)點:
13、本發(fā)明所述的空間正交壓扭耦合柔性壓電粘滑驅(qū)動器及其驅(qū)動方法,通過壓電疊堆以及柔性驅(qū)動組件之間的接觸作用實現(xiàn)了對動子的精密驅(qū)動,在壓電疊堆升降過程中,基于具有特殊結(jié)構(gòu)的第一鉸鏈、第二鉸鏈以及第三鉸鏈之間的相互配合連動作用,實現(xiàn)了將壓電疊堆在高度方向上的應(yīng)變高效轉(zhuǎn)化為水平側(cè)向位移輸出的效果,由此結(jié)合壓扭耦合的獨特特性精確調(diào)控定子與動子之間的摩擦力,有效消除了動子回退運動現(xiàn)象。相比于現(xiàn)階段常規(guī)粘滑驅(qū)動器來說,本申請兼具結(jié)構(gòu)巧妙、可控性高、可有效防止回退、響應(yīng)速度快、驅(qū)動過程精密以及使用范圍廣泛等顯著優(yōu)勢,在航空航天、光學(xué)精密儀器、半導(dǎo)體加工等微納精密驅(qū)動與定位領(lǐng)域展現(xiàn)出了廣闊的應(yīng)用潛力與前景。
技術(shù)特征:
1.一種空間正交壓扭耦合柔性壓電粘滑驅(qū)動器,其特征在于:包括:
2.根據(jù)權(quán)利要求1所述的空間正交壓扭耦合柔性壓電粘滑驅(qū)動器,其特征在于:所述第一鉸鏈所在曲面的曲率半徑與所述第二鉸鏈所在曲面的曲率半徑相同,且均為r;所述第一鉸鏈兩端在第三方向上的間隔距離與所述第一鉸鏈兩端在第三方向上的間隔距離相同,且均為l;所述柔性驅(qū)動組件軸向剛度分布∝l/r,其中,1<l/r<10。
3.根據(jù)權(quán)利要求1所述的空間正交壓扭耦合柔性壓電粘滑驅(qū)動器,其特征在于:所述第一連接部與所述第二連接部所形成的銳角為α,且30°<α<60°。
4.根據(jù)權(quán)利要求1所述的空間正交壓扭耦合柔性壓電粘滑驅(qū)動器,其特征在于:所述驅(qū)動足在第三方向上的厚度小于所述移動導(dǎo)軌在第三方向上的厚度,以提高所述驅(qū)動足與所述動子之間的有效接觸面積。
5.根據(jù)權(quán)利要求1所述的空間正交壓扭耦合柔性壓電粘滑驅(qū)動器,其特征在于:所述定子還包括連接組件,所述連接組件包括裝配主體、預(yù)緊墊片以及調(diào)節(jié)件,所述裝配主體設(shè)置于所述壓電疊堆兩端,所述第一鉸鏈及所述第二鉸鏈的兩端均連接于所述裝配主體,所述預(yù)緊墊片設(shè)置于所述壓電疊堆及所述裝配主體之間,所述調(diào)節(jié)件穿設(shè)連接所述裝配主體、所述預(yù)緊墊片以及所述壓電疊堆以調(diào)節(jié)所述壓電疊堆的軸向預(yù)緊力。
6.根據(jù)權(quán)利要求1所述的空間正交壓扭耦合柔性壓電粘滑驅(qū)動器,其特征在于:所述空間正交壓扭耦合柔性壓電粘滑驅(qū)動器還包括預(yù)緊機構(gòu),所述預(yù)緊機構(gòu)包括:
7.根據(jù)權(quán)利要求6所述的空間正交壓扭耦合柔性壓電粘滑驅(qū)動器,其特征在于:所述預(yù)緊機構(gòu)還包括調(diào)節(jié)螺旋桿以及緊固螺釘,所述調(diào)節(jié)螺旋桿設(shè)置于所述基座上,且與所述移動平臺螺紋連接,以調(diào)節(jié)所述移動平臺及所述基座的相對位置,所述緊固螺釘可穿設(shè)固定所述基座及所述移動平臺。
8.根據(jù)權(quán)利要求1所述的空間正交壓扭耦合柔性壓電粘滑驅(qū)動器,其特征在于:所述固定底座包括相互垂直連接的第一安裝部以及第二安裝部,其中,所述第一安裝部沿水平方向延伸,其上連接所述定子,所述第二安裝部設(shè)置于所述第一安裝部一側(cè),其頂部包括連接臺面及避讓臺階,其中,所述連接臺面與所述固定導(dǎo)軌可拆卸地連接,所述避讓臺階由所述連接臺面向下凹陷,所述移動導(dǎo)軌在所述避讓臺階上方移動,且與所述避讓臺階間隔設(shè)置。
9.一種空間正交壓扭耦合柔性壓電粘滑驅(qū)動器驅(qū)動方法,其特征在于:用以通過權(quán)利要求1~8中任意一項所述的空間正交壓扭耦合柔性壓電粘滑驅(qū)動器進行粘滑驅(qū)動過程,其包括:
10.根據(jù)權(quán)利要求9所述的空間正交壓扭耦合柔性壓電粘滑驅(qū)動器驅(qū)動方法,其特征在于:步驟s2至步驟s5中的電壓信號為鋸齒波形電壓信號,所述電壓信號波動周期t在0.001~1.000s之間,所述電壓信號強度在60~120v之間,所述鋸齒波形電壓信號對稱性在50.00~99.99%之間。
技術(shù)總結(jié)
本發(fā)明提供了一種空間正交壓扭耦合柔性壓電粘滑驅(qū)動器及其驅(qū)動方法,其包括:固定底座;定子,定子包括壓電疊堆及柔性驅(qū)動組件,柔性驅(qū)動組件包括第一鉸鏈、第二鉸鏈及第三鉸鏈;動子,動子包括固定導(dǎo)軌以及移動導(dǎo)軌。本發(fā)明通過壓電疊堆以及柔性驅(qū)動組件之間的接觸作用實現(xiàn)了對動子的精密驅(qū)動,在壓電疊堆升降過程中,基于具有特殊結(jié)構(gòu)的第一鉸鏈、第二鉸鏈以及第三鉸鏈之間的相互配合連動作用,實現(xiàn)了將壓電疊堆在高度方向上的應(yīng)變高效轉(zhuǎn)化為水平側(cè)向位移輸出的效果,由此結(jié)合壓扭耦合的獨特特性精確調(diào)控定子與動子之間的摩擦力,有效消除了動子回退運動現(xiàn)象進而兼具結(jié)構(gòu)巧妙、可控性高、響應(yīng)速度快、驅(qū)動過程精密以及使用范圍廣泛等顯著優(yōu)勢。
技術(shù)研發(fā)人員:請求不公布姓名,請求不公布姓名,請求不公布姓名,請求不公布姓名,請求不公布姓名
受保護的技術(shù)使用者:蘇州博真科技有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!