一種回流功率優化的DAB變換器滑模控制方法與流程
本技術涉及回流功率優化相關,尤其涉及一種回流功率優化的dab變換器滑模控制方法。
背景技術:
1、在現代電力電子技術的快速發展中,雙有源橋(dab)變換器作為一種高效、可靠的功率轉換裝置,在電力傳輸、電動汽車充電、可再生能源系統等領域展現出了廣泛的應用前景。dab變換器通過高頻變壓器實現電氣隔離和電壓匹配,通過調節輸入電壓、輸出電流來優化回流功率,其性能優化成為提升系統整體效率與穩定性的關鍵,回流功率指的是在功率轉換過程中,部分能量以反向的形式返回到電源,從而降低了整體能量轉換效率。傳統控制方法(如pi控制或pid控制)在優化回流功率時,難以應對系統中的非線性因素和復雜的動態行為,進而難以實現高效、精確的能量傳輸,尤其是在減小回流功率(即無效的能量循環)方面存在顯著挑戰,應用滑模控制優化dab變換器的回流功率過程中,選擇合適的控制參數(如占空比、相移角和切換增益)對于實現最佳控制效果至關重要,傳統的手動調參方法難以同時滿足不同工況下的需求,容易導致控制性能不理想、回流功率優化不足。
2、現階段回流功率優化的dab變換器滑模控制相關技術中,存在難以實現高效、精確的參數控制和能量傳輸,導致回流功率控制優化效果不佳的技術問題。
技術實現思路
1、本技術通過提供一種回流功率優化的dab變換器滑模控制方法,解決了現有dab變換器滑模控制存在的難以實現高效、精確的參數控制和能量傳輸,導致回流功率控制優化效果不佳的技術問題,實現滑模控制快響應和高精度,達到減少回流功率的技術效果。
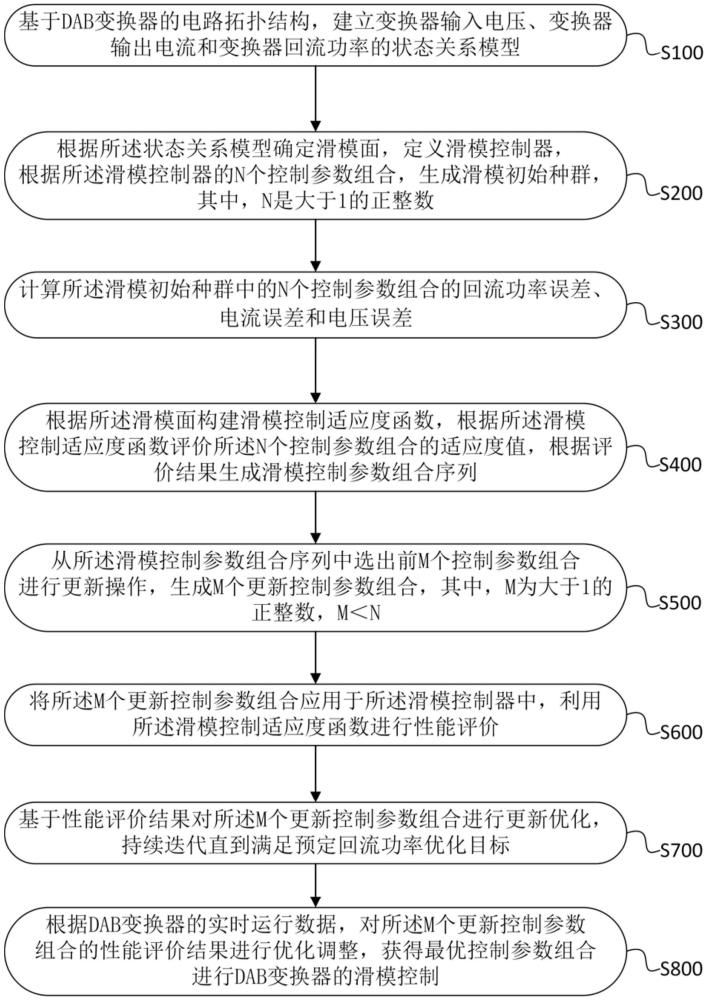
2、本技術提供一種回流功率優化的dab變換器滑模控制方法,包括:基于dab變換器的電路拓撲結構,建立變換器輸入電壓、變換器輸出電流和變換器回流功率的狀態關系模型;根據所述狀態關系模型確定滑模面,定義滑模控制器,根據所述滑模控制器的n個控制參數組合,生成滑模初始種群,其中,n是大于1的正整數;計算所述滑模初始種群中的n個控制參數組合的回流功率誤差、電流誤差和電壓誤差;根據所述滑模面構建滑模控制適應度函數,根據所述滑模控制適應度函數評價所述n個控制參數組合的適應度值,根據評價結果生成滑模控制參數組合序列;從所述滑模控制參數組合序列中選出前m個控制參數組合進行更新操作,生成m個更新控制參數組合,其中,m為大于1的正整數,m<n;將所述m個更新控制參數組合應用于所述滑模控制器中,利用所述滑模控制適應度函數進行性能評價;基于性能評價結果對所述m個更新控制參數組合進行更新優化,持續迭代直到滿足預定回流功率優化目標;根據dab變換器的實時運行數據,對所述m個更新控制參數組合的性能評價結果進行優化調整,獲得最優控制參數組合進行dab變換器的滑模控制。
3、在可能的實現方式中,從所述滑模控制參數組合序列中選出前m個控制參數組合進行更新操作,生成m個更新控制參數組合,還執行以下處理:基于滑模控制適應度函數的計算結果,按n個控制參數組合的適應度值進行從低到高排序,獲得滑模控制參數組合序列,從中選取適應度值低于預設適應度閾值的m個控制參數組合;對所述m個控制參數組合進行交叉操作,生成m個交叉控制參數組合;對所述m個交叉控制參數組合進行變異操作,獲得所述m個更新控制參數組合,生成滑模更新種群;利用所述滑模控制適應度函數對所述滑模更新組合的更新控制參數組合進行性能評價,獲得初始滑模控制評價結果。
4、在可能的實現方式中,所述獲得最優控制參數組合并進行dab變換器的滑模控制,還執行以下處理:獲取所述實時運行數據,包括實時輸入電壓、實時輸出電流和實時回流功率;將所述實時運行數據反饋給所述滑模控制器,利用所述滑模控制器優化調整所述m個更新控制參數組合;使用所述滑模控制適應度函數對所述m個更新控制參數組合進行適應度再計算,結合所述初始滑模控制評價結果,選取適應度值最大的控制參數組合作為最優控制參數組合;對所述最優控制參數組合進行外界干擾測試,若測試通過,將所述最優控制參數組合用于dab變換器的滑模控制。
5、在可能的實現方式中,對所述最優控制參數組合進行外界干擾測試,若測試通過,將所述最優控制參數組合用于dab變換器的滑模控制,還執行以下處理:通過仿真不同強度的外界干擾條件,模擬dab變換器的多個滑模控制場景,其中,所述外界干擾條件包括輸入電壓波動、負載變化和環境溫度變化;分別計算所述多個滑模控制場景下的模擬回流功率誤差,將所述模擬回流功率誤差和所述回流功率誤差進行對比,根據對比結果判斷是否通過所述外界干擾測試;若所述最優控制參數組合通過所述外界干擾測試,作為dab變換器最終的最優控制參數組合;若所述最優控制參數組合未能通過所述外界干擾測試,根據所述實時運行數據重新調整控制參數,多次迭代達到回流功率優化目標,獲得最終的最優控制參數組合。
6、在可能的實現方式中,根據所述滑模控制器的n個控制參數組合,生成滑模初始種群,還執行以下處理:根據dab變換器的實時環境參數,調整所述滑模控制適應度函數權重;通過隨機初始化占空比、相移角和切換增益;基于調整后的所述滑模控制適應度函數優化調整所述滑模控制器的切換增益;基于所述占空比、所述相移角和切換增益,生成n個控制參數組合,獲得所述滑模初始種群。
7、在可能的實現方式中,所述根據所述滑模面構建滑模控制適應度函數,還執行以下處理:基于所述回流功率誤差、所述電流誤差和所述電壓誤差的組合,建立滑模面誤差函數;基于所述滑模面誤差函數,以最大允許的回流功率閾值、電流波動范圍和相移角限值為所述滑模控制適應度函數的約束條件,以最小化回流功率誤差、電流誤差和電壓誤差的加權和為目標建立所述滑模控制適應度函數。
8、在可能的實現方式中,所述建立變換器輸入電壓、變換器輸出電流和變換器回流功率的狀態關系模型,還執行以下處理:根據dab變換器的電路拓撲結構,確定電流傳輸方向;根據所述電流傳輸方向,獲得dab變換器中輸入橋臂的電壓和輸出橋臂的電流;定義dab變換器的狀態變量,包括輸入電壓、輸出電流和回流功率的狀態變量;根據所述狀態變量建立的微分方程,構建所述狀態關系模型。
9、在可能的實現方式中,獲得所述回流功率,還執行以下處理:通過分析橋臂正向傳輸波形和橋臂反向傳輸波形,計算橋臂輸入功率和橋臂輸出功率;根據所述橋臂輸入功率和橋臂輸出功率,計算dab變換器的回流功率。
10、擬通過本技術提出的一種回流功率優化的dab變換器滑模控制方法,基于dab變換器的電路拓撲結構,建立變換器輸入電壓、變換器輸出電流和變換器回流功率的狀態關系模型;根據所述狀態關系模型確定滑模面,定義滑模控制器,根據所述滑模控制器的n個控制參數組合,生成滑模初始種群,其中,n是大于1的正整數;計算所述滑模初始種群中的n個控制參數組合的回流功率誤差、電流誤差和電壓誤差;根據所述滑模面構建滑模控制適應度函數,根據所述滑模控制適應度函數評價所述n個控制參數組合的適應度值,根據評價結果生成滑模控制參數組合序列;從所述滑模控制參數組合序列中選出前m個控制參數組合進行更新操作,生成m個更新控制參數組合,其中,m為大于1的正整數,m<n;將所述m個更新控制參數組合應用于所述滑模控制器中,利用所述滑模控制適應度函數進行性能評價;基于性能評價結果對所述m個更新控制參數組合進行更新優化,持續迭代直到滿足預定回流功率優化目標;根據dab變換器的實時運行數據,對所述m個更新控制參數組合的性能評價結果進行優化調整,獲得最優控制參數組合進行dab變換器的滑模控制。解決了現有dab變換器滑模控制存在的難以實現高效、精確的參數控制和能量傳輸,導致回流功率控制優化效果不佳的技術問題,實現滑模控制快響應和高精度,達到減少回流功率的技術效果。
- 還沒有人留言評論。精彩留言會獲得點贊!