分布式調(diào)相機(jī)三次諧波零壓定子接地保護(hù)方法和裝置與流程
本發(fā)明涉及電力系統(tǒng)繼電保護(hù),尤其涉及一種分布式調(diào)相機(jī)三次諧波零壓定子接地保護(hù)方法和裝置。
背景技術(shù):
1、大型調(diào)相機(jī)為隱極機(jī)、調(diào)變組接線形式和中性點(diǎn)接地方式固定,且無機(jī)端斷路器。而分布式調(diào)相機(jī)中存在凸極機(jī)和隱極機(jī)兩種形式,主接線形式和中性點(diǎn)接地方式不固定且與大型調(diào)相機(jī)調(diào)不同,有機(jī)端斷路器,當(dāng)機(jī)端斷路器斷開時(shí),三次諧波電壓比計(jì)算只考慮機(jī)端和中性點(diǎn)分布電容的影響,當(dāng)機(jī)端斷路器合閘后,三次諧波電壓比的計(jì)算又考慮了主變、勵(lì)磁變、母線等系統(tǒng)側(cè)電容的影響,并且大多數(shù)機(jī)端斷路器兩側(cè)都裝有防止過電壓的并聯(lián)電容器,因此機(jī)組并網(wǎng)前后,三次諧波電壓比差異較大,需根據(jù)不同工況設(shè)置相應(yīng)的保護(hù)定值。
2、轉(zhuǎn)子繞組磁動(dòng)勢與定子繞組磁動(dòng)勢共同作用,產(chǎn)生分布式調(diào)相機(jī)氣隙磁場的三次諧波磁通。并網(wǎng)前沒有電樞反應(yīng),機(jī)端三次諧波為機(jī)端電壓的三次諧波分量,并網(wǎng)帶負(fù)荷后,電樞反應(yīng)作用使磁路飽和,產(chǎn)生三次諧波電勢,其中有功功率電樞反應(yīng)產(chǎn)生的磁通位于調(diào)相機(jī)q軸方向,無功功率電樞反應(yīng)產(chǎn)生的磁通位于調(diào)相機(jī)d軸方向,對于凸極分布式調(diào)相機(jī)來說,d軸方向氣隙較小,易飽和,因此無功功率對凸極式分布式調(diào)相機(jī)三次諧波電勢影響較大,不同無功功率時(shí)三次諧波電壓比有差異,導(dǎo)致常規(guī)的三次諧波電壓比判據(jù)可靠性降低,因此應(yīng)該專門針對分布式調(diào)相機(jī)研究同時(shí)適用于隱極式和凸極式分布式調(diào)相機(jī)的三次諧波零壓定子接地保護(hù)方法。
技術(shù)實(shí)現(xiàn)思路
1、有鑒于此,本發(fā)明提供一種分布式調(diào)相機(jī)三次諧波零壓定子接地保護(hù)方法和裝置,以解決上述提及的至少一個(gè)問題。
2、為了實(shí)現(xiàn)上述目的,本發(fā)明采用以下方案:
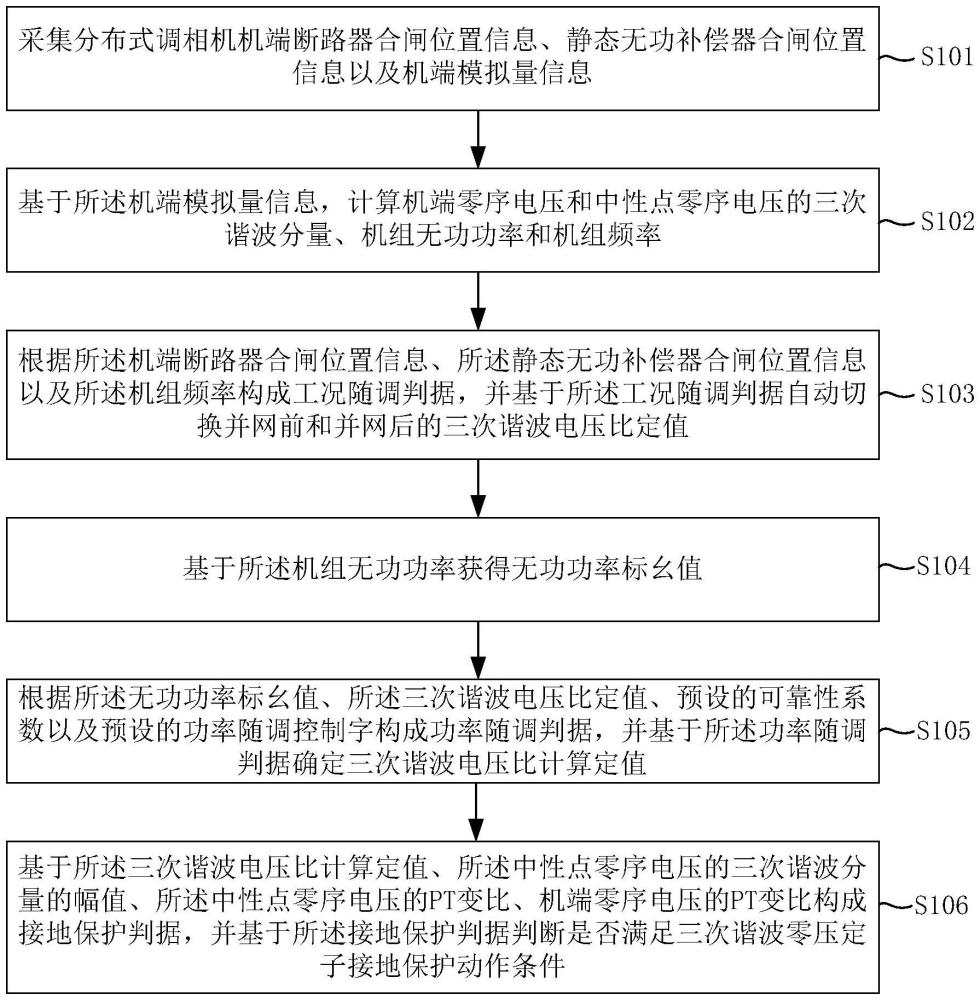
3、根據(jù)本發(fā)明的第一方面,提供一種分布式調(diào)相機(jī)三次諧波零壓定子接地保護(hù)方法,所述方法包括:采集分布式調(diào)相機(jī)機(jī)端斷路器合閘位置信息、靜態(tài)無功補(bǔ)償器合閘位置信息以及機(jī)端模擬量信息;基于所述機(jī)端模擬量信息,計(jì)算機(jī)端零序電壓和中性點(diǎn)零序電壓的三次諧波分量、機(jī)組無功功率和機(jī)組頻率;根據(jù)所述機(jī)端斷路器合閘位置信息、所述靜態(tài)無功補(bǔ)償器合閘位置信息以及所述機(jī)組頻率構(gòu)成工況隨調(diào)判據(jù),并基于所述工況隨調(diào)判據(jù)自動(dòng)切換并網(wǎng)前和并網(wǎng)后的三次諧波電壓比定值;基于所述機(jī)組無功功率獲得無功功率標(biāo)幺值;根據(jù)所述無功功率標(biāo)幺值、所述三次諧波電壓比定值、預(yù)設(shè)的可靠性系數(shù)以及預(yù)設(shè)的功率隨調(diào)控制字構(gòu)成功率隨調(diào)判據(jù),并基于所述功率隨調(diào)判據(jù)確定三次諧波電壓比計(jì)算定值;基于所述三次諧波電壓比計(jì)算定值、所述中性點(diǎn)零序電壓的三次諧波分量的幅值、所述中性點(diǎn)零序電壓的pt變比、機(jī)端零序電壓的pt變比構(gòu)成接地保護(hù)判據(jù),并基于所述接地保護(hù)判據(jù)判斷是否滿足三次諧波零壓定子接地保護(hù)動(dòng)作條件。
4、作為本發(fā)明的一個(gè)實(shí)施例,上述方法中機(jī)端模擬量信息包括:機(jī)端三相電壓、機(jī)端三相電流、機(jī)端零序電壓及中性點(diǎn)零序電壓的采樣值。
5、作為本發(fā)明的一個(gè)實(shí)施例,上述方法中基于所述機(jī)端模擬量信息,計(jì)算機(jī)端零序電壓和中性點(diǎn)零序電壓的三次諧波分量、機(jī)組無功功率和機(jī)組頻率包括:利用所述機(jī)端零序電壓和所述中性點(diǎn)零序電壓的采樣值,通過傅氏算法和數(shù)字濾波器算法求出機(jī)端零序電壓的三次諧波分量、中性點(diǎn)零序電壓的三次諧波分量;利用所述機(jī)端三相電壓和所述機(jī)端三相電流的采樣值,通過傅氏算法和無功功率算法,求得機(jī)組無功功率;利用所述機(jī)端三相電壓的采樣值,通過硬件測頻算法或軟件測頻算法,求得機(jī)組頻率。
6、作為本發(fā)明的一個(gè)實(shí)施例,上述方法中根據(jù)所述機(jī)端斷路器合閘位置信息、所述靜態(tài)無功補(bǔ)償器合閘位置信息以及所述機(jī)組頻率構(gòu)成工況隨調(diào)判據(jù),并基于所述工況隨調(diào)判據(jù)自動(dòng)切換并網(wǎng)前和并網(wǎng)后的三次諧波電壓比定值包括:當(dāng)機(jī)端斷路器合閘位置信息為1、靜態(tài)無功補(bǔ)償器合閘位置信息為0,且機(jī)組頻率大于設(shè)定頻率時(shí),判定機(jī)組并網(wǎng)狀態(tài)為1,機(jī)端斷路器合閘位置信息為1表示有機(jī)端斷路器合閘位置開入,靜態(tài)無功補(bǔ)償器合閘位置信息為0表示無靜態(tài)無功補(bǔ)償器合閘位置開入,機(jī)組并網(wǎng)狀態(tài)為1表示機(jī)組處于并網(wǎng)狀態(tài);當(dāng)機(jī)端斷路器合閘位置為0或靜態(tài)無功補(bǔ)償器合閘位置為1時(shí),延時(shí)判定為機(jī)組并網(wǎng)狀態(tài)為0,機(jī)端斷路器合閘位置為0表示無機(jī)端斷路器合閘位置開入,靜態(tài)無功補(bǔ)償器合閘位置為1表示有靜態(tài)無功補(bǔ)償器合閘位置開入,機(jī)組并網(wǎng)狀態(tài)為0表示機(jī)組未處于并網(wǎng)狀態(tài);
7、構(gòu)建如下式的工況隨調(diào)判據(jù):
8、
9、上式中,kset為三次諧波電壓比定值,kbeforeset為并網(wǎng)前三次諧波電壓比定值,kafterset并網(wǎng)后三次諧波電壓比定值,工況隨調(diào)控制字為可整定控制字,當(dāng)分布式調(diào)相機(jī)并網(wǎng)前后實(shí)測三次電壓比值差異超過設(shè)定閾值時(shí),工況隨調(diào)控制字整定為1,否則,工況隨調(diào)控制字整定為0;
10、基于所述工況隨調(diào)判據(jù)輸出定值自動(dòng)切換后的kset值。
11、作為本發(fā)明的一個(gè)實(shí)施例,上述方法中基于所述機(jī)組無功功率獲得無功功率標(biāo)幺值包括:
12、基于所述機(jī)組無功功率,利用下式獲得無功功率標(biāo)幺值:
13、
14、上式中,q*為無功功率標(biāo)幺值,qn為分布式調(diào)相機(jī)額定容量,q為機(jī)組無功功率。
15、作為本發(fā)明的一個(gè)實(shí)施例,上述方法中根據(jù)所述無功功率標(biāo)幺值、所述三次諧波電壓比定值、預(yù)設(shè)的可靠性系數(shù)以及預(yù)設(shè)的功率隨調(diào)控制字構(gòu)成功率隨調(diào)判據(jù),并基于所述功率隨調(diào)判據(jù)確定三次諧波電壓比計(jì)算定值包括:
16、根據(jù)所述無功功率標(biāo)幺值、所述三次諧波電壓比定值、預(yù)設(shè)的可靠性系數(shù)以及預(yù)設(shè)的功率隨調(diào)控制字構(gòu)成如下式的功率隨調(diào)判據(jù):
17、
18、上式中:kjsset是三次諧波電壓比計(jì)算定值,kr為可靠系數(shù),kr的可整定范圍為0.01~0.2,功率隨調(diào)控制字為可整定控制字,當(dāng)分布式調(diào)相機(jī)為凸極機(jī)時(shí),功率隨調(diào)控制字整定為1,當(dāng)為隱極機(jī)時(shí),功率隨調(diào)控制字整定為0。
19、作為本發(fā)明的一個(gè)實(shí)施例,上述方法中基于所述三次諧波電壓比計(jì)算定值、所述中性點(diǎn)零序電壓的三次諧波分量的幅值、所述中性點(diǎn)零序電壓的pt變比、機(jī)端零序電壓的pt變比構(gòu)成接地保護(hù)判據(jù),并基于所述接地保護(hù)判據(jù)判斷是否滿足三次諧波零壓定子接地保護(hù)動(dòng)作條件包括:
20、基于所述三次諧波電壓比計(jì)算定值、所述中性點(diǎn)零序電壓的三次諧波分量的幅值、所述中性點(diǎn)零序電壓的pt變比、機(jī)端零序電壓的pt變比構(gòu)成如下式所示的接地保護(hù)判據(jù):
21、
22、上式中:為機(jī)端零序電壓三次諧波分量,un3為中性點(diǎn)零序電壓三次諧波分量的幅值;ntv3為中性點(diǎn)零序電壓的pt變比;ntv1為機(jī)端零序電壓的pt變比;
23、當(dāng)所述接地保護(hù)判據(jù)滿足動(dòng)作條件,經(jīng)過延時(shí)tset,判定為三次諧波零壓定子接地保護(hù)動(dòng)作。
24、根據(jù)本發(fā)明的第二方面,提供一種分布式調(diào)相機(jī)三次諧波零壓定子接地保護(hù)裝置,所述裝置包括:信息采集單元,用于采集分布式調(diào)相機(jī)機(jī)端斷路器合閘位置信息、靜態(tài)無功補(bǔ)償器合閘位置信息以及機(jī)端模擬量信息;數(shù)據(jù)計(jì)算單元,用于基于所述機(jī)端模擬量信息,計(jì)算機(jī)端零序電壓和中性點(diǎn)零序電壓的三次諧波分量、機(jī)組無功功率和機(jī)組頻率;工況隨調(diào)單元,用于根據(jù)所述機(jī)端斷路器合閘位置信息、所述靜態(tài)無功補(bǔ)償器合閘位置信息以及所述機(jī)組頻率構(gòu)成工況隨調(diào)判據(jù),并基于所述工況隨調(diào)判據(jù)自動(dòng)切換并網(wǎng)前和并網(wǎng)后的三次諧波電壓比定值;標(biāo)幺值獲取單元,用于基于所述機(jī)組無功功率獲得無功功率標(biāo)幺值;計(jì)算定值確定單元,用于根據(jù)所述無功功率標(biāo)幺值、所述三次諧波電壓比定值、預(yù)設(shè)的可靠性系數(shù)以及預(yù)設(shè)的功率隨調(diào)控制字構(gòu)成功率隨調(diào)判據(jù),并基于所述功率隨調(diào)判據(jù)確定三次諧波電壓比計(jì)算定值;接地保護(hù)判斷單元,用于基于所述三次諧波電壓比計(jì)算定值、所述中性點(diǎn)零序電壓的三次諧波分量的幅值、所述中性點(diǎn)零序電壓的pt變比、機(jī)端零序電壓的pt變比構(gòu)成接地保護(hù)判據(jù),并基于所述接地保護(hù)判據(jù)判斷是否滿足三次諧波零壓定子接地保護(hù)動(dòng)作條件。
25、作為本發(fā)明的一個(gè)實(shí)施例,上述機(jī)端模擬量信息包括:機(jī)端三相電壓、機(jī)端三相電流、機(jī)端零序電壓及中性點(diǎn)零序電壓的采樣值。
26、作為本發(fā)明的一個(gè)實(shí)施例,上述數(shù)據(jù)計(jì)算單元包括:諧波分量計(jì)算模塊,用于利用所述機(jī)端零序電壓和所述中性點(diǎn)零序電壓的采樣值,通過傅氏算法和數(shù)字濾波器算法求出機(jī)端零序電壓的三次諧波分量、中性點(diǎn)零序電壓的三次諧波分量;無功功率計(jì)算模塊,用于利用所述機(jī)端三相電壓和所述機(jī)端三相電流的采樣值,通過傅氏算法和無功功率算法,求得機(jī)組無功功率;頻率計(jì)算模塊,用于利用所述機(jī)端三相電壓的采樣值,通過硬件測頻算法或軟件測頻算法,求得機(jī)組頻率。
27、作為本發(fā)明的一個(gè)實(shí)施例,上述工況隨調(diào)單元具體用于:當(dāng)機(jī)端斷路器合閘位置信息為1、靜態(tài)無功補(bǔ)償器合閘位置信息為0,且機(jī)組頻率大于設(shè)定頻率時(shí),判定機(jī)組并網(wǎng)狀態(tài)為1,機(jī)端斷路器合閘位置信息為1表示有機(jī)端斷路器合閘位置開入,靜態(tài)無功補(bǔ)償器合閘位置信息為0表示無靜態(tài)無功補(bǔ)償器合閘位置開入,機(jī)組并網(wǎng)狀態(tài)為1表示機(jī)組處于并網(wǎng)狀態(tài);當(dāng)機(jī)端斷路器合閘位置為0或靜態(tài)無功補(bǔ)償器合閘位置為1時(shí),延時(shí)判定為機(jī)組并網(wǎng)狀態(tài)為0,機(jī)端斷路器合閘位置為0表示無機(jī)端斷路器合閘位置開入,靜態(tài)無功補(bǔ)償器合閘位置為1表示有靜態(tài)無功補(bǔ)償器合閘位置開入,機(jī)組并網(wǎng)狀態(tài)為0表示機(jī)組未處于并網(wǎng)狀態(tài);
28、構(gòu)建如下式的工況隨調(diào)判據(jù):
29、
30、上式中,kset為三次諧波電壓比定值,kbeforeset為并網(wǎng)前三次諧波電壓比定值,kafterset并網(wǎng)后三次諧波電壓比定值,工況隨調(diào)控制字為可整定控制字,當(dāng)分布式調(diào)相機(jī)并網(wǎng)前后實(shí)測三次電壓比值差異超過設(shè)定閾值時(shí),工況隨調(diào)控制字整定為1,否則,工況隨調(diào)控制字整定為0;
31、基于所述工況隨調(diào)判據(jù)輸出定值自動(dòng)切換后的kset值。
32、作為本發(fā)明的一個(gè)實(shí)施例,上述標(biāo)幺值獲取單元具體用于:基于所述機(jī)組無功功率,利用下式獲得無功功率標(biāo)幺值:
33、
34、上式中,q*為無功功率標(biāo)幺值,qn為分布式調(diào)相機(jī)額定容量,q為機(jī)組無功功率。
35、作為本發(fā)明的一個(gè)實(shí)施例,上述計(jì)算定值確定單元具體用于:根據(jù)所述無功功率標(biāo)幺值、所述三次諧波電壓比定值、預(yù)設(shè)的可靠性系數(shù)以及預(yù)設(shè)的功率隨調(diào)控制字構(gòu)成如下式的功率隨調(diào)判據(jù):
36、
37、上式中:kjsset是三次諧波電壓比計(jì)算定值,kr為可靠系數(shù),kr的可整定范圍為0.01~0.2,功率隨調(diào)控制字為可整定控制字,當(dāng)分布式調(diào)相機(jī)為凸極機(jī)時(shí),功率隨調(diào)控制字整定為1,當(dāng)為隱極機(jī)時(shí),功率隨調(diào)控制字整定為0。
38、作為本發(fā)明的一個(gè)實(shí)施例,上述接地保護(hù)判斷單元具體用于:基于所述三次諧波電壓比計(jì)算定值、所述中性點(diǎn)零序電壓的三次諧波分量的幅值、所述中性點(diǎn)零序電壓的pt變比、機(jī)端零序電壓的pt變比構(gòu)成如下式所示的接地保護(hù)判據(jù):
39、
40、上式中:為機(jī)端零序電壓三次諧波分量,un3為中性點(diǎn)零序電壓三次諧波分量的幅值;ntv3為中性點(diǎn)零序電壓的pt變比;ntv1為機(jī)端零序電壓的pt變比;
41、當(dāng)所述接地保護(hù)判據(jù)滿足動(dòng)作條件,經(jīng)過延時(shí)tset,判定為三次諧波零壓定子接地保護(hù)動(dòng)作。
42、根據(jù)本發(fā)明的第三方面,提供一種電子設(shè)備,包括存儲器、處理器以及存儲在所述存儲器上并可在所述處理器上運(yùn)行的計(jì)算機(jī)程序,處理器執(zhí)行所述計(jì)算機(jī)程序時(shí)實(shí)現(xiàn)上述方法的步驟。
43、根據(jù)本發(fā)明的第四方面,提供一種計(jì)算機(jī)可讀存儲介質(zhì),其上存儲有計(jì)算機(jī)程序,所述計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)上述方法的步驟。
44、本發(fā)明所提出的分布式調(diào)相機(jī)三次諧波零壓定子接地保護(hù)方法和裝置,通過工況隨調(diào)判據(jù),能夠快速識別機(jī)組的運(yùn)行工況(并網(wǎng)前或并網(wǎng)后),并自動(dòng)切換相應(yīng)的保護(hù)定值,避免了因工況變化導(dǎo)致的保護(hù)誤動(dòng)或拒動(dòng),提高了保護(hù)的靈活性。功率隨調(diào)判據(jù)通過無功功率標(biāo)幺值制動(dòng),進(jìn)一步提高了不同運(yùn)行工況下的保護(hù)可靠性。另外,本技術(shù)同時(shí)適用于凸極式和隱極式分布式調(diào)相機(jī),以及有機(jī)端斷路器和無機(jī)端斷路器的各種情況,適用范圍廣,適合推廣應(yīng)用。
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!