對(duì)焦方法及裝置、電子設(shè)備、存儲(chǔ)介質(zhì)與流程
本公開(kāi)涉及成像,尤其涉及一種對(duì)焦方法及裝置、電子設(shè)備、存儲(chǔ)介質(zhì)。
背景技術(shù):
1、如今手機(jī)、相機(jī)、平板電腦、可穿戴設(shè)備等電子設(shè)備,拍照和視頻錄像等功能已經(jīng)成為用戶(hù)選購(gòu)電子設(shè)備的核心需求,其中成像的清晰度備受關(guān)注。目前相位對(duì)焦技術(shù)(phase?detection?auto?focus,pdaf)憑借對(duì)焦速度快的優(yōu)點(diǎn),成為主流的自動(dòng)對(duì)焦方式。相位對(duì)焦技術(shù)廣泛應(yīng)用于電子設(shè)備中圖像處理模塊的前端,通過(guò)像素間的灰度差異確定相位差,進(jìn)而基于相位差指導(dǎo)對(duì)焦,提高成像的清晰度。然而,通過(guò)像素間的灰度差異確定相位差的準(zhǔn)確度較低,難以滿(mǎn)足清晰成像的要求。
技術(shù)實(shí)現(xiàn)思路
1、本公開(kāi)提供一種對(duì)焦方法及裝置、電子設(shè)備、存儲(chǔ)介質(zhì)。
2、根據(jù)本公開(kāi)實(shí)施例的第一方面,提供一種對(duì)焦方法,包括:
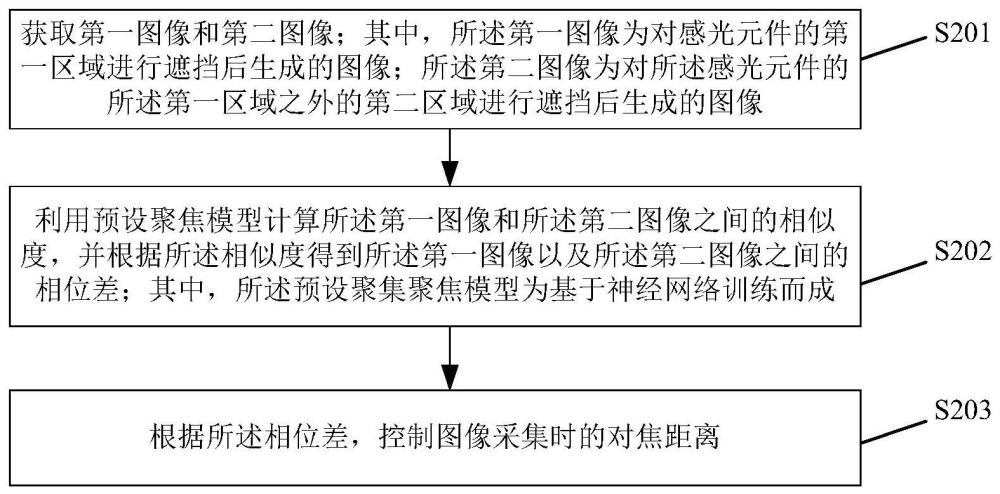
3、獲取第一圖像和第二圖像;其中,所述第一圖像為對(duì)感光元件的第一區(qū)域進(jìn)行遮擋后生成的圖像;所述第二圖像為對(duì)所述感光元件的所述第一區(qū)域之外的第二區(qū)域進(jìn)行遮擋后生成的圖像;
4、利用預(yù)設(shè)聚焦模型計(jì)算所述第一圖像和所述第二圖像之間的相似度,并根據(jù)所述相似度得到所述第一圖像以及所述第二圖像之間的相位差;其中,所述預(yù)設(shè)聚焦模型為基于神經(jīng)網(wǎng)絡(luò)訓(xùn)練而成;
5、根據(jù)所述相位差,控制圖像采集時(shí)的對(duì)焦距離。
6、在一些實(shí)施例中,所述方法還包括:
7、確定所述第一圖像中的第一區(qū)塊;
8、在所述第二圖像中確定包括所述第一區(qū)塊坐標(biāo)位置的第二區(qū)塊;其中,所述第二區(qū)塊的尺寸大于所述第一區(qū)塊的尺寸;
9、所述利用預(yù)設(shè)聚焦模型計(jì)算所述第一圖像和所述第二圖像之間的相似度,并根據(jù)所述相似度得到所述第一圖像以及所述第二圖像之間的相位差,包括:
10、利用所述預(yù)設(shè)聚焦模型對(duì)所述第一區(qū)塊以及所述第二區(qū)塊進(jìn)行處理,確定所述第二區(qū)塊中各子區(qū)塊與所述第一區(qū)塊之間的相似度;其中,所述第二區(qū)塊中的子區(qū)塊的尺寸與所述第一區(qū)塊的尺寸一致;
11、根據(jù)所述第一區(qū)塊與所述第二區(qū)塊中各子區(qū)塊之間的相似度,確定所述第一圖像以及所述第二圖像之間的相位差。
12、在一些實(shí)施例中,所述預(yù)設(shè)聚焦模型包括特征提取層、特征處理層、預(yù)測(cè)層;所述利用所述預(yù)設(shè)聚焦模型對(duì)所述第一區(qū)塊以及所述第二區(qū)塊進(jìn)行處理,確定所述第二區(qū)塊中各子區(qū)塊與所述第一區(qū)塊之間的相似度,包括:
13、利用所述特征提取層分別對(duì)所述第一區(qū)塊以及所述第二區(qū)塊進(jìn)行特性提取,得到所述第一區(qū)塊對(duì)應(yīng)的第一特征,以及所述第二區(qū)塊對(duì)應(yīng)的第二特征;
14、利用所述特征處理層根據(jù)所述第一特征的第一尺寸在所述第二特征中滑動(dòng)選取與所述第一尺寸一致的子特征,并計(jì)算所述第一特征與各子特征之間的相似度;
15、所述根據(jù)所述第一區(qū)塊與所述第二區(qū)塊中各子區(qū)塊之間的相似度,確定所述第一圖像以及所述第二圖像之間的相位差,包括:
16、利用所述預(yù)測(cè)層根據(jù)所述第一特征與各子特征之間的相似度,確定所述第一圖像以及所述第二圖像之間的相位差。
17、在一些實(shí)施例中,所述利用所述預(yù)測(cè)層根據(jù)所述第一特征與各子特征之間的相似度,確定所述第一圖像以及所述第二圖像之間的相位差,包括:
18、通過(guò)所述預(yù)測(cè)層,根據(jù)相似度滿(mǎn)足預(yù)設(shè)相似度閾值的子特征所對(duì)應(yīng)的子區(qū)塊在所述第二圖像中的位置,與所述第一區(qū)塊在所述第一圖像中的位置之間的位置差,確定所述第一圖像以及所述第二圖像之間的相位差。
19、在一些實(shí)施例中,所述特征處理層包括特征選取層、上采樣層以及特征計(jì)算層;
20、所述利用所述特征處理層根據(jù)所述第一特征的第一尺寸在所述第二特征中滑動(dòng)選取與所述第一尺寸一致的子特征,并計(jì)算所述第一特征與各子特征之間的相似度,包括:
21、所述利用所述特征選取層根據(jù)所述第一特征的第一尺寸在所述第二特征中滑動(dòng)選取與所述第一尺寸一致的子特征;
22、利用所述上采樣層,對(duì)所述第一特征以及各子特征進(jìn)行上采樣,得到上采樣后的第一特征、上采樣后的各子特征;
23、利用所述特征計(jì)算層計(jì)算所述上采樣后的第一特征與各上采樣后的子特征之間的相似度。
24、在一些實(shí)施例中,所述方法還包括:
25、根據(jù)所述第一區(qū)塊與所述第二區(qū)塊中各子區(qū)塊之間的相似度,確定所述第一圖像以及所述第二圖像之間的相位差的置信度;
26、所述根據(jù)所述相位差,控制圖像采集時(shí)的對(duì)焦距離,包括:
27、在所述置信度大于預(yù)設(shè)置信度閾值的情況下,根據(jù)所述相位差,控制圖像采集時(shí)的對(duì)焦距離。
28、在一些實(shí)施例中,所述根據(jù)所述第一區(qū)塊與所述第二區(qū)塊中各子區(qū)塊之間的相似度,確定所述第一圖像以及所述第二圖像之間的相位差的置信度,包括:
29、根據(jù)所述各子區(qū)塊與所述第一區(qū)塊之間的相似度,得到相似度曲線;
30、根據(jù)所述相似度曲線,確定所述第一圖像以及所述第二圖像之間的相位差所對(duì)應(yīng)的相似度在所述相似度曲線中的曲線斜率;
31、根據(jù)所述曲線斜率,確定所述相位差的置信度。
32、在一些實(shí)施例中,所述方法還包括:
33、獲取在鏡頭移動(dòng)過(guò)程中每一鏡頭位置采集的第一圖像樣本以及第二圖像樣本;其中,所述第一圖像樣本為對(duì)感光元件的第一區(qū)域進(jìn)行遮擋后生成的多個(gè)圖像;所述第二圖像樣本為對(duì)所述感光元件的所述第一區(qū)域之外的第二區(qū)域進(jìn)行遮擋后生成的多個(gè)圖像;
34、基于鏡頭移動(dòng)過(guò)程中各鏡頭位置對(duì)應(yīng)的第一圖像樣本以及第二圖像樣本,生成訓(xùn)練圖像樣本,并確定所述訓(xùn)練圖像樣本對(duì)應(yīng)的標(biāo)簽值;
35、利用所述訓(xùn)練圖像樣本以及所述訓(xùn)練圖像樣本對(duì)應(yīng)的標(biāo)簽值,對(duì)所述神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,得到訓(xùn)練后的所述預(yù)設(shè)聚焦模型。
36、在一些實(shí)施例中,所述基于鏡頭移動(dòng)過(guò)程中各鏡頭位置對(duì)應(yīng)的第一圖像樣本以及第二圖像樣本,生成訓(xùn)練圖像樣本,并確定所述訓(xùn)練圖像樣本對(duì)應(yīng)的標(biāo)簽值,包括:
37、基于鏡頭移動(dòng)過(guò)程中各鏡頭位置對(duì)應(yīng)的第一圖像樣本以及第二圖像樣本進(jìn)行合成,得到各鏡頭位置對(duì)應(yīng)的合成圖像樣本;
38、確定所述各鏡頭位置對(duì)應(yīng)的合成圖像樣本的清晰度;
39、根據(jù)各合成圖像樣本的清晰度以及各合成圖像樣本對(duì)應(yīng)的鏡頭位置,確定各合成圖像樣本對(duì)應(yīng)的相位差;
40、基于各鏡頭位置對(duì)應(yīng)的第一圖像樣本以及第二圖像樣本生成訓(xùn)練圖像樣本,并基于各鏡頭位置關(guān)聯(lián)的合成圖像樣本對(duì)應(yīng)的相位差生成鏡頭位置關(guān)聯(lián)的所述訓(xùn)練圖像樣本對(duì)應(yīng)的標(biāo)簽值。
41、在一些實(shí)施例中,所述各合成圖像樣本對(duì)應(yīng)的相位差包括各合成圖像樣本中合成區(qū)塊樣本對(duì)應(yīng)的相位差;所述確定所述各鏡頭位置對(duì)應(yīng)的合成圖像樣本的清晰度,包括:
42、針對(duì)每一合成圖像樣本,劃分多個(gè)合成區(qū)塊樣本;
43、確定每一合成圖像樣本所包括的各合成區(qū)塊樣本的清晰度;
44、所述根據(jù)各合成圖像樣本的清晰度以及各合成圖像樣本對(duì)應(yīng)的鏡頭位置,確定各合成圖像樣本對(duì)應(yīng)的相位差,包括:
45、根據(jù)各合成圖像樣本中相同坐標(biāo)位置的合成區(qū)塊樣本的清晰度,確定坐標(biāo)位置對(duì)應(yīng)的清晰度滿(mǎn)足預(yù)設(shè)清晰度閾值的目標(biāo)合成區(qū)塊樣本;
46、針對(duì)每一合成圖像樣本中的每一合成區(qū)塊樣本,根據(jù)合成區(qū)塊樣本所在合成圖像樣本對(duì)應(yīng)的第一鏡頭位置,與合成區(qū)塊樣本關(guān)聯(lián)的目標(biāo)合成區(qū)塊樣本所在合成圖像樣本對(duì)應(yīng)的第二鏡頭位置,確定合成區(qū)塊樣本與關(guān)聯(lián)的目標(biāo)合成區(qū)塊樣本之間的相位差。
47、在一些實(shí)施例中,所述根據(jù)合成區(qū)塊樣本所在合成圖像樣本對(duì)應(yīng)的第一鏡頭位置,與合成區(qū)塊樣本關(guān)聯(lián)的目標(biāo)合成區(qū)塊樣本所在合成圖像樣本對(duì)應(yīng)的第二鏡頭位置,確定合成區(qū)塊樣本與關(guān)聯(lián)的目標(biāo)合成區(qū)塊樣本之間的相位差,包括:
48、確定所述第一鏡頭位置和所述第二鏡頭位置之間的位置差;
49、根據(jù)所述位置差以及預(yù)設(shè)的位置差與相位差的映射關(guān)系,確定合成區(qū)塊樣本與關(guān)聯(lián)的目標(biāo)合成區(qū)塊樣本之間的相位差。
50、在一些實(shí)施例中,所述訓(xùn)練圖像樣本包括多區(qū)塊樣本組;所述基于各鏡頭位置對(duì)應(yīng)的第一圖像樣本以及第二圖像樣本生成訓(xùn)練圖像樣本,包括:
51、針對(duì)每一鏡頭位置對(duì)應(yīng)的第一圖像樣本,劃分多個(gè)第一區(qū)塊樣本;
52、針對(duì)每一鏡頭位置的每一第一區(qū)塊樣本,在鏡頭位置對(duì)應(yīng)的第二圖像樣本中確定包括所述第一區(qū)塊樣本坐標(biāo)位置的第二區(qū)塊樣本;其中,所述第二區(qū)塊樣本的尺寸大于所述第一區(qū)塊樣本的尺寸;
53、針對(duì)每一第一區(qū)塊樣本,將第一區(qū)塊樣本以及所述第一區(qū)塊樣本對(duì)應(yīng)的第二區(qū)塊樣本作為區(qū)塊樣本組,得到包括多區(qū)塊樣本組的所述訓(xùn)練圖像樣本。
54、在一些實(shí)施例中,所述合成圖像樣本對(duì)應(yīng)的相位差包括合成區(qū)塊樣本對(duì)應(yīng)的相位差;所述訓(xùn)練圖像樣本包括多區(qū)塊樣本組;所述基于各鏡頭位置關(guān)聯(lián)的合成圖像樣本對(duì)應(yīng)的相位差生成鏡頭位置關(guān)聯(lián)的所述訓(xùn)練圖像樣本對(duì)應(yīng)的標(biāo)簽值,包括:
55、針對(duì)同一鏡頭位置對(duì)應(yīng)的合成圖像樣本以及所述訓(xùn)練圖像樣本,將合成圖像樣本中合成區(qū)塊樣本對(duì)應(yīng)的相位差,作為訓(xùn)練圖像樣本中與所述合成區(qū)塊樣本坐標(biāo)位置一致的區(qū)塊樣本組的標(biāo)簽值。
56、根據(jù)本公開(kāi)實(shí)施例的第二方面,提供一種對(duì)焦裝置,包括:
57、第一獲取模塊,用于獲取第一圖像和第二圖像;其中,所述第一圖像為對(duì)感光元件的第一區(qū)域進(jìn)行遮擋后生成的圖像;所述第二圖像為對(duì)所述感光元件的所述第一區(qū)域之外的第二區(qū)域進(jìn)行遮擋后生成的圖像;
58、得到模塊,用于利用預(yù)設(shè)聚焦模型計(jì)算所述第一圖像和所述第二圖像之間的相似度,并根據(jù)所述相似度得到所述第一圖像以及所述第二圖像之間的相位差;其中,所述預(yù)設(shè)聚焦模型為基于神經(jīng)網(wǎng)絡(luò)訓(xùn)練而成;
59、對(duì)焦模塊,用于根據(jù)所述相位差,控制圖像采集時(shí)的對(duì)焦距離。
60、在一些實(shí)施例中,所述裝置還包括:
61、第一確定模塊,用于確定所述第一圖像中的第一區(qū)塊;
62、第二確定模塊,用于在所述第二圖像中確定包括所述第一區(qū)塊坐標(biāo)位置的第二區(qū)塊;其中,所述第二區(qū)塊的尺寸大于所述第一區(qū)塊的尺寸;
63、所述得到模塊,用于利用所述預(yù)設(shè)聚焦模型對(duì)所述第一區(qū)塊以及所述第二區(qū)塊進(jìn)行處理,確定所述第二區(qū)塊中各子區(qū)塊與所述第一區(qū)塊之間的相似度;其中,所述第二區(qū)塊中的子區(qū)塊的尺寸與所述第一區(qū)塊的尺寸一致;根據(jù)所述第一區(qū)塊與所述第二區(qū)塊中各子區(qū)塊之間的相似度,確定所述第一圖像以及所述第二圖像之間的相位差。
64、在一些實(shí)施例中,所述預(yù)設(shè)聚焦模型包括特征提取層、特征處理層、預(yù)測(cè)層;所述得到模塊,用于利用所述特征提取層分別對(duì)所述第一區(qū)塊以及所述第二區(qū)塊進(jìn)行特性提取,得到所述第一區(qū)塊對(duì)應(yīng)的第一特征,以及所述第二區(qū)塊對(duì)應(yīng)的第二特征;利用所述特征處理層根據(jù)所述第一特征的第一尺寸在所述第二特征中滑動(dòng)選取與所述第一尺寸一致的子特征,并計(jì)算所述第一特征與各子特征之間的相似度;利用所述預(yù)測(cè)層根據(jù)所述第一特征與各子特征之間的相似度,確定所述第一圖像以及所述第二圖像之間的相位差。
65、在一些實(shí)施例中,所述得到模塊,用于通過(guò)所述預(yù)測(cè)層,根據(jù)相似度滿(mǎn)足預(yù)設(shè)相似度閾值的子特征所對(duì)應(yīng)的子區(qū)塊在所述第二圖像中的位置,與所述第一區(qū)塊在所述第一圖像中的位置之間的位置差,確定所述第一圖像以及所述第二圖像之間的相位差。
66、在一些實(shí)施例中,所述特征處理層包括特征選取層、上采樣層以及特征計(jì)算層;
67、所述得到模塊,用于所述利用所述特征選取層根據(jù)所述第一特征的第一尺寸在所述第二特征中滑動(dòng)選取與所述第一尺寸一致的子特征;利用所述上采樣層,對(duì)所述第一特征以及各子特征進(jìn)行上采樣,得到上采樣后的第一特征、上采樣后的各子特征;利用所述特征計(jì)算層計(jì)算所述上采樣后的第一特征與各上采樣后的子特征之間的相似度。
68、在一些實(shí)施例中,所述裝置還包括:
69、第三確定模塊,用于根據(jù)所述第一區(qū)塊與所述第二區(qū)塊中各子區(qū)塊之間的相似度,確定所述第一圖像以及所述第二圖像之間的相位差的置信度;
70、所述對(duì)焦模塊,用于在所述置信度大于預(yù)設(shè)置信度閾值的情況下,根據(jù)所述相位差,控制圖像采集時(shí)的對(duì)焦距離。
71、在一些實(shí)施例中,所述第三確定模塊,用于根據(jù)所述各子區(qū)塊與所述第一區(qū)塊之間的相似度,得到相似度曲線;根據(jù)所述相似度曲線,確定所述第一圖像以及所述第二圖像之間的相位差所對(duì)應(yīng)的相似度在所述相似度曲線中的曲線斜率;根據(jù)所述曲線斜率,確定所述相位差的置信度。
72、在一些實(shí)施例中,所述裝置還包括:
73、第二獲取模塊,用于獲取在鏡頭移動(dòng)過(guò)程中每一鏡頭位置采集的第一圖像樣本以及第二圖像樣本;其中,所述第一圖像樣本為對(duì)感光元件的第一區(qū)域進(jìn)行遮擋后生成的多個(gè)圖像;所述第二圖像樣本為對(duì)所述感光元件的所述第一區(qū)域之外的第二區(qū)域進(jìn)行遮擋后生成的多個(gè)圖像;
74、生成模塊,用于基于鏡頭移動(dòng)過(guò)程中各鏡頭位置對(duì)應(yīng)的第一圖像樣本以及第二圖像樣本,生成訓(xùn)練圖像樣本,并確定所述訓(xùn)練圖像樣本對(duì)應(yīng)的標(biāo)簽值;
75、訓(xùn)練模塊,用于利用所述訓(xùn)練圖像樣本以及所述訓(xùn)練圖像樣本對(duì)應(yīng)的標(biāo)簽值,對(duì)所述神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,得到訓(xùn)練后的所述預(yù)設(shè)聚焦模型。
76、在一些實(shí)施例中,所述生成模塊,用于基于鏡頭移動(dòng)過(guò)程中各鏡頭位置對(duì)應(yīng)的第一圖像樣本以及第二圖像樣本進(jìn)行合成,得到各鏡頭位置對(duì)應(yīng)的合成圖像樣本;確定所述各鏡頭位置對(duì)應(yīng)的合成圖像樣本的清晰度;根據(jù)各合成圖像樣本的清晰度以及各合成圖像樣本對(duì)應(yīng)的鏡頭位置,確定各合成圖像樣本對(duì)應(yīng)的相位差;基于各鏡頭位置對(duì)應(yīng)的第一圖像樣本以及第二圖像樣本生成訓(xùn)練圖像樣本,并基于各鏡頭位置關(guān)聯(lián)的合成圖像樣本對(duì)應(yīng)的相位差生成鏡頭位置關(guān)聯(lián)的所述訓(xùn)練圖像樣本對(duì)應(yīng)的標(biāo)簽值。
77、在一些實(shí)施例中,所述各合成圖像樣本對(duì)應(yīng)的相位差包括各合成圖像樣本中合成區(qū)塊樣本對(duì)應(yīng)的相位差;所述生成模塊,用于針對(duì)每一合成圖像樣本,劃分多個(gè)合成區(qū)塊樣本;確定每一合成圖像樣本所包括的各合成區(qū)塊樣本的清晰度;根據(jù)各合成圖像樣本中相同坐標(biāo)位置的合成區(qū)塊樣本的清晰度,確定坐標(biāo)位置對(duì)應(yīng)的清晰度滿(mǎn)足預(yù)設(shè)清晰度閾值的目標(biāo)合成區(qū)塊樣本;針對(duì)每一合成圖像樣本中的每一合成區(qū)塊樣本,根據(jù)合成區(qū)塊樣本所在合成圖像樣本對(duì)應(yīng)的第一鏡頭位置,與合成區(qū)塊樣本關(guān)聯(lián)的目標(biāo)合成區(qū)塊樣本所在合成圖像樣本對(duì)應(yīng)的第二鏡頭位置,確定合成區(qū)塊樣本與關(guān)聯(lián)的目標(biāo)合成區(qū)塊樣本之間的相位差。
78、在一些實(shí)施例中,所述生成模塊,用于確定所述第一鏡頭位置和所述第二鏡頭位置之間的位置差;根據(jù)所述位置差以及預(yù)設(shè)的位置差與相位差的映射關(guān)系,確定合成區(qū)塊樣本與關(guān)聯(lián)的目標(biāo)合成區(qū)塊樣本之間的相位差。
79、在一些實(shí)施例中,所述訓(xùn)練圖像樣本包括多區(qū)塊樣本組;所述生成模塊,用于針對(duì)每一鏡頭位置對(duì)應(yīng)的第一圖像樣本,劃分多個(gè)第一區(qū)塊樣本;針對(duì)每一鏡頭位置的每一第一區(qū)塊樣本,在鏡頭位置對(duì)應(yīng)的第二圖像樣本中確定包括所述第一區(qū)塊樣本坐標(biāo)位置的第二區(qū)塊樣本;其中,所述第二區(qū)塊樣本的尺寸大于所述第一區(qū)塊樣本的尺寸;針對(duì)每一第一區(qū)塊樣本,將第一區(qū)塊樣本以及所述第一區(qū)塊樣本對(duì)應(yīng)的第二區(qū)塊樣本作為區(qū)塊樣本組,得到包括多區(qū)塊樣本組的所述訓(xùn)練圖像樣本。
80、在一些實(shí)施例中,所述合成圖像樣本對(duì)應(yīng)的相位差包括合成區(qū)塊樣本對(duì)應(yīng)的相位差;所述訓(xùn)練圖像樣本包括多區(qū)塊樣本組;所述生成模塊,用于針對(duì)同一鏡頭位置對(duì)應(yīng)的合成圖像樣本以及所述訓(xùn)練圖像樣本,將合成圖像樣本中合成區(qū)塊樣本對(duì)應(yīng)的相位差,作為訓(xùn)練圖像樣本中與所述合成區(qū)塊樣本坐標(biāo)位置一致的區(qū)塊樣本組的標(biāo)簽值。
81、根據(jù)本公開(kāi)實(shí)施例的第三方面,提供一種電子設(shè)備,包括:
82、處理器;用于存儲(chǔ)處理器可執(zhí)行指令的存儲(chǔ)器;其中,所述處理器被配置為執(zhí)行如上述第一方面中所述的方法。
83、根據(jù)本公開(kāi)實(shí)施例的第四方面,提供一種存儲(chǔ)介質(zhì),包括:
84、當(dāng)所述存儲(chǔ)介質(zhì)中的指令由電子設(shè)備的處理器執(zhí)行時(shí),使得電子設(shè)備能夠執(zhí)行如上述第一方面中所述的方法。
85、本公開(kāi)的實(shí)施例提供的技術(shù)方案可以包括以下有益效果:
86、由于相關(guān)技術(shù)中利用模型得到包括場(chǎng)景深度信息或鏡頭位置信息的分類(lèi)結(jié)果,并結(jié)合預(yù)設(shè)映射關(guān)系得到分類(lèi)結(jié)果對(duì)應(yīng)的對(duì)焦距離,而分類(lèi)結(jié)果的精度較低,難以滿(mǎn)足不同拍攝場(chǎng)景,且模型計(jì)算的場(chǎng)景深度準(zhǔn)確性難以評(píng)判、鏡頭位置與對(duì)焦距離的映射關(guān)系耦合了如鏡頭馬達(dá)機(jī)械位移參數(shù)等影響,導(dǎo)致相關(guān)技術(shù)中確定的對(duì)焦距離準(zhǔn)確性較低。本公開(kāi)實(shí)施例提供的方案,一方面,利用訓(xùn)練收斂后的預(yù)設(shè)聚焦模型輸出第一圖像以及第二圖像之間的相位差,進(jìn)而基于相位差控制圖像采集時(shí)的對(duì)焦距離,減小如鏡頭馬達(dá)機(jī)械位移參數(shù)等影響,滿(mǎn)足工程上需要基于相位差指導(dǎo)對(duì)焦的需求的同時(shí)具有較高的泛化能力;另一方面,由于左圖與右圖之間的相似度與左圖與右圖之間的相位差的相關(guān)性較大,因此本公開(kāi)實(shí)施例預(yù)設(shè)聚焦模型通過(guò)計(jì)算第一圖像和第二圖像之間的相似度,根據(jù)相似度得到第一圖像與第二圖像之間的相位差的準(zhǔn)確性較高,從而提高基于相位差確定對(duì)焦距離的準(zhǔn)確性,實(shí)現(xiàn)對(duì)焦得到更為清晰的圖像,提高用戶(hù)拍攝體驗(yàn)。
87、應(yīng)當(dāng)理解的是,以上的一般描述和后文的細(xì)節(jié)描述僅是示例性和解釋性的,并不能限制本公開(kāi)。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!