一種多源多精度操作系統時間同步方法與流程
本發明涉及特種車輛電子信息系統時間同步,尤其涉及一種多源多精度操作系統時間同步方法。
背景技術:
1、隨著新型民用智能汽車和特種車輛研制,車輛電子信息系統已發展為以車載計算機和車載終端為核心組成的網聯式架構,實現信息共享、大帶寬、低延時、高可靠的車內傳輸網絡、服務化軟件架構。隨著車輛信息化、智能化程度越來越高以及無人特種作業快速發展需要,車輛運行和多車間數據交互過程中,各種數據的傳輸都離不開時間信息,因此時間同步是特種車輛電子系統中的各個設備實現協調一致,信息傳輸無誤的重要保障,也是特種車輛執行消防、救援等作業任務執行的前提條件。特種車輛作為執行消防、救援等任務重要裝備,具有實現獨立自主、安全可靠的發展目標。
2、傳統的基于國產軟硬件環境的特種車輛電子信息系統,時間同步能力較差,有以下主要缺陷:
3、傳統的國產特種車輛電子信息系統,北斗設備只有與車內通信設備進行tod(timeof?day,日時間)高精度時間同步,而北斗設備采用低精度時間同步方式將北斗天文時間數據通過can(controller?area?network)或千兆以太網等機內總線發送給車載計算機和車載終端等電子設備,電子設備將收到北斗天文時間設置為本地時間,時間同步精度在毫秒級或甚至秒級。該方法已不能滿足新型特種車輛電子系統網聯架構下時間同步需求,不能滿足在復雜環境條件下執行多車協同及無人車協同參與的消防、救援作業任務需求。
4、時間同步策略單一,傳統的基于國產軟硬件環境的特種車輛電子信息系統雖然已將美國的gps技術(globle?positioning?ststem,全球定位系統)替代為國產的北斗衛星導航系統技術完成了國產化替代,但只采用單一時鐘源(北斗天文時間),本地時間同步依賴北斗衛星天文時間信息,當車輛處于北斗衛星信號差且車載守時授時設備工作狀態不正常時,則無法完成系統內各設備時間同步,影響車輛系統信息傳輸和融合,不能滿足車輛行動、多車協同、無人車操控等實際作業需求。
5、時間同步精度較差,傳統的基于國產軟硬件環境的特種車輛電子信息系統,北斗設備只有與車內通信設備(例如:車載電臺等)進行tod高精度時間同步,而北斗設備采用低精度時間同步方式將北斗天文時間數據通過can(controller?area?network)或千兆以太網等車內總線發送給車載計算機和車載終端等電子設備,電子設備將收到北斗天文時間設置為本地時間,時間同步精度僅在毫秒級或甚至秒級。該方法已不能滿足新型特種車輛電子系統網聯架構下的時間同步需求,不能滿足在復雜環境條件下執行多車協同及無人車協同參與的消防、救援作業任務需求。
技術實現思路
1、鑒于上述的分析,本發明實施例旨在提供一種多源多精度操作系統時間同步方法,用以解決如何在基于國產軟硬件平臺的特種車輛下進行車載計算機和車載終端車載節點的時間同步,并提高時間同步精度以及提供多種時間同步策略滿足不同場景下的時間需求的技術問題。
2、本發明的目的主要是通過以下技術方案實現的:
3、本發明提供了一種多源多精度操作系統時間同步方法,包括如下步驟:
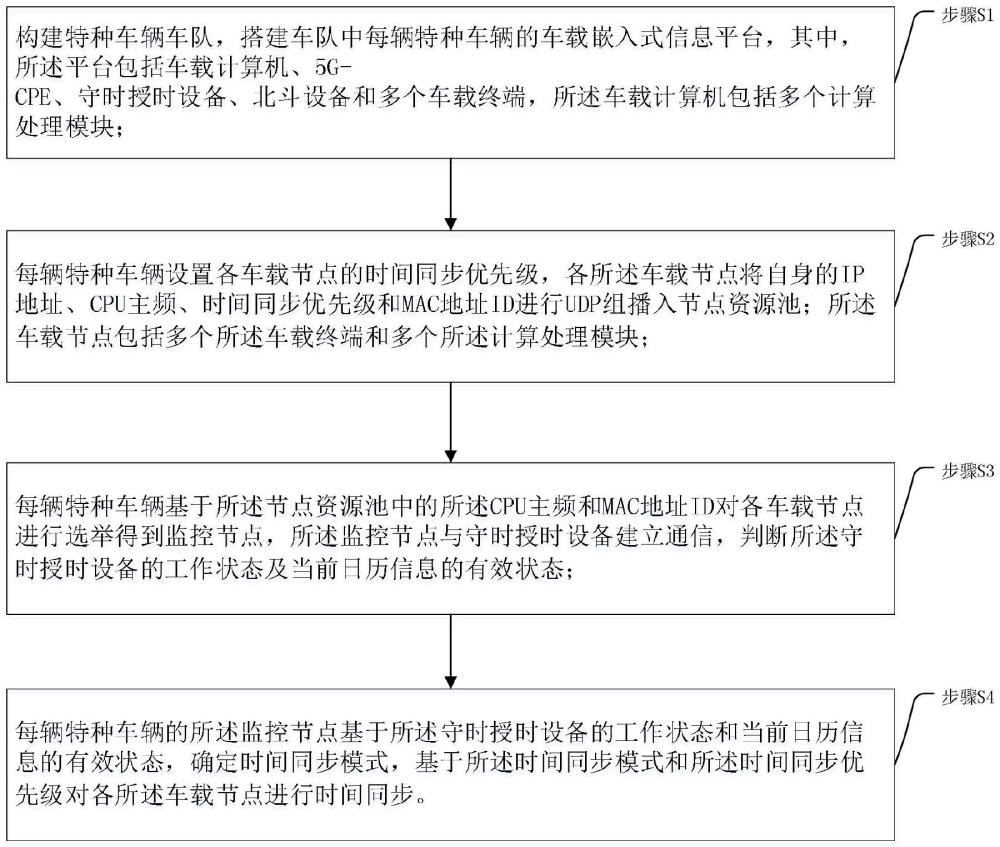
4、步驟s1、構建特種車輛車隊,搭建車隊中每輛特種車輛的車載嵌入式信息平臺,其中,所述平臺包括車載計算機、5g-cpe、守時授時設備、北斗設備和多個車載終端,所述車載計算機包括多個計算處理模塊;
5、步驟s2、每輛特種車輛設置各車載節點的時間同步優先級,各所述車載節點將自身的ip地址、cpu主頻、時間同步優先級和mac地址id進行udp組播入節點資源池;所述車載節點包括多個所述車載終端和多個所述計算處理模塊;
6、步驟s3、每輛特種車輛基于所述節點資源池中的所述cpu主頻和mac地址id對各車載節點進行選舉得到監控節點,所述監控節點與守時授時設備建立通信,判斷所述守時授時設備的工作狀態及當前日歷信息的有效狀態;
7、步驟s4、每輛特種車輛的所述監控節點基于所述守時授時設備的工作狀態和當前日歷信息的有效狀態,確定時間同步模式,基于所述時間同步模式和所述時間同步優先級對各所述車載節點進行時間同步。
8、進一步地,每輛特種車輛基于bully選舉算法對所述cpu主頻和mac地址id進行選舉得到監控節點,包括:
9、篩選所述cpu主頻最高的車載節點作為監控候選節點,若監控候選節點個數為1,則該車載節點為監控節點;
10、否則,基于所述mac地址id進行選舉,選舉出mac地址id最大的車載節點作為監控節點,其他車載節點選舉為非監控節點;
11、若所述監控節點在預定時間周期內停止發布選舉因子時,重新選擇監控節點。
12、進一步地,所述監控節點與守時授時設備建立通信,包括:
13、第一步、所述監控節點向所述守時授時設備的固定ip地址和端口號發送第一udp心跳報文;
14、第二步、所述守時授時設備接收到所述第一udp心跳報文后,向所述監控節點回應發送第二udp心跳報文和udp數據報文;若所述守時授時設備在連續預設時間周期內未收到所述第一udp心跳報文,則返回第一步;
15、第三步、所述監控節點基于接收到所述第二udp心跳報文進行解析,判斷所述守時授時設備的工作狀態、以及當前日歷信息是否有效;
16、其中,所述udp數據報文包括發送時間戳。
17、進一步地,所述步驟s4,包括:
18、若車隊中所有車輛的所述守時授時設備的工作狀態均為已同步或者有部分車輛的守時授時設備的工作狀態為已同步,并且所述當前日歷信息為有效時,采用高精度ptp時間同步模式基于守時授時設備時鐘源對各車載節點進行高精度時間同步;
19、若所述守時授時設備的工作狀態為正在對時、守時或rtc授時,并且所述當前日歷信息為有效時,基于所述5g-cpe的車間5g蜂窩網進行車輛選舉得出基準車輛,采用低精度ptp時間同步模式基于所述基準車輛的守時授時設備的時鐘源對車隊中車載節點進行低精度時間同步;
20、若車隊中所有車輛的所述守時授時設備的工作狀態均為非同步時,所述頭車的監控節點進行udp組播采用本地自主時間同步模式,車隊中每輛車的車載節點基于頭車的監控節點的日歷信息作為時鐘源,基于車載節點的時間同步優先級利用所述5g-cpe的車間5g蜂窩網對車隊中所有車輛的車載節點進行低精度時間同步;
21、當在一定時間周期內未收到高精度或低精度ptp時間同步模式,或本地自主時間同步模式,則每個車載節點采用本地手動時間同步模式,基于手動設置的頭車的監控節點的系統時間,對頭車的其他車載節點以及車隊中其他車輛的車載節點的系統時間進行低精度時間同步。
22、進一步地,若車隊中所有車輛的所述守時授時設備的工作狀態均為已同步時,并且所述當前日歷信息為有效時,每輛車以本車的守時授時設備的時鐘源為基準,對本車的其他車載節點進行高精度ptp時間同步;
23、若有部分車輛的守時授時設備的工作狀態為已同步,并且所述當前日歷信息為有效時,守時授時設備的工作狀態為已同步的車輛,以自身的守時授時設備的時鐘源為基準,對本車的其他車載節點進行高精度ptp時間同步;同時守時授時設備的工作狀態不為已同步的車輛,以守時授時設備的工作狀態為已同步的車輛的車輛id最大的車輛的監控節點的系統時間為基準,基于所述5g蜂窩網對本車的所有車載節點進行高精度ptp時間同步。
24、進一步地,基于延時-請求測量的高精度ptp時間同步模式對車載節點的系統時間進行高精度時間同步,如下:
25、所述守時授時設備作為ptp服務端,所述監控節點作為ptp客戶端;
26、所述ptp服務端向所述ptp客戶端發送sync同步報文,同時記錄報文發送時間t1;
27、所述ptp客戶端收到所述sync同步報文,同時記錄報文接收時間t2;
28、所述ptp服務端將t1放在follow_up跟隨延遲報文發送到所述ptp客戶端,所述ptp客戶端收到報文后解析出時間t1;
29、所述ptp客戶端向ptp服務端發送delay_req延遲請求報文,同步記錄下delay_req延遲請求報文發送的時間t3,所述ptp服務端收到報文記錄收到的時間t4;
30、所述ptp服務端將t4時間放在delay_resp延時響應報文發送所述ptp客戶端,所述ptp客戶端收到此報文解析出t4;所述ptp客戶端得到時間值t1、t2、t3和t4;
31、所述ptp服務端與客戶端之間的時間偏差值offset和網絡鏈路延遲delay,計算如下:
32、t2-t1-offset=delay
33、t4-(t3-offset)=delay
34、計算得到:
35、offset=[(t2-t1)+(t3-t4)]/2
36、delay=[(t2-t1)+(t4-t3)]/2
37、所述ptp客戶端基于所述時間偏差值offset,將本地系統時間值減去offset值,得到與所述ptp服務端高精度時鐘源的同步時間,并同步更新監控節點的本地系統時間。
38、進一步地,所述低精度ptp時間同步模式每輛車對車載節點的系統時間進行低精度時間同步,如下:
39、所述車輛選舉包括:
40、找出所述守時授時設備的工作狀態為守時的特種車輛,若為守時狀態的車輛數大于1,選擇在車隊中為守時狀態的車輛id值小的車輛作為基準車輛;
41、否則找出所述守時授時設備的工作狀態為正在對時的特種車輛,若為正在對時狀態的車輛數大于1,選擇車隊中為正在對時狀態的車輛id值小的車輛作為基準車輛;
42、否則找出所述守時授時設備的工作狀態為rtc授時的特種車輛,若為rtc授時狀態的車輛數大于1,選擇車隊中為rtc授時狀態的車輛id值小的車輛作為基準車輛;
43、以所述基準車輛的守時授時設備的時鐘源為基準,對基準車輛中其他車載節點進行時間同步;
44、同時利用5g-cpe的車間5g蜂窩網對車隊中其他車輛的車載節點進行低精度時間同步。
45、進一步地,基于所述本地自主時間同步模式對車隊中每輛車的車載節點的系統時間進行低精度時間同步,包括:
46、頭車中各車載節點基于所述節點資源池中其他車載節點周期性udp組播的系統時間和時間同步優先級信息;選擇時間同步優先級最高的車載節點的系統時間,基于預設的有效時間閾值判斷所選擇的系統時間的有效性,若有效,則將本車載節點的系統時間更新為所選擇的系統時間;
47、將所述頭車的監控節點的系統時間作為最高優先級的時鐘源,利用5g-cpe的車間5g蜂窩網對車隊中其他車輛的車載節點同步更新為所述頭車的監控節點的系統時間。
48、進一步地,基于所述本地手動時間同步模式基于手動設置的頭車的監控節點的系統時間,對頭車的車載節點以及車隊中其他車輛的車載節點的系統時間進行低精度時間同步,包括:
49、利用頭車的作業指揮車載終端的時間修改界面設置頭車的監控節點的系統時間;
50、基于預設的有效時間閾值判斷設置的頭車的監控節點的系統時間的有效性;
51、若有效,將頭車的其他車載節點以及車隊中其他車輛的車載節點的系統時間同步為頭車的監控節點的系統時間。
52、進一步地,所述步驟s1,包括:
53、對車隊中每輛特種車輛分配唯一車輛id進行索引,確定頭車及后車,所述頭車的車輛id最小,后車的車輛id依次增大;
54、每輛特種車輛的車載嵌入式信息平臺中各車載節點和設備通過以太網連接;
55、所述北斗設備將通過接收北斗衛星信號獲取的高精度時間tod授時給所述守時授時設備;
56、車隊中各特種車輛基于所述5g-cpe進行5g蜂窩網連接;
57、所述車載終端和計算處理模塊均采用國產openeuler操作系統;所述車載終端采用瑞芯微rk3588cpu處理器;所述計算處理模塊采用飛騰fd-2000/8核cpu處理器。
58、與現有技術相比,本發明至少可實現如下有益效果之一:
59、1、本發明中操作系統時間同步方法是基于國產openeuler操作系統、國產芯片下進行的自主可控的定制研發;本發明方法不僅提高了特種車輛車載嵌入式信息平臺的性能和可靠性,還確保平臺的自主可控和安全性,滿足特種車輛在復雜環境下的多車協同和無人車協同作業需求;
60、2、本發明采用高精度ptp時間同步模式,基于守時授時設備的高精度時鐘源,通過精確的時間戳交換和偏差計算,能夠實現亞微秒級的高精度時間同步。相較于傳統方法僅能達到毫秒級或秒級精度,大幅提升時間同步精度,滿足了新型特種車輛電子系統網聯架構下對時間同步精度的更高要求,為多車協同參與的復雜作業任務提供可靠時間保障;
61、3、本發明采用多源時間同步策略,突破傳統單一時間源的局限,融合多種時間源。采用高精度ptp時間同步模式、低精度ptp時間同步模式、本地自主時間同步模式以及本地手動時間同步模式四種模式的多源時間同步策略,多源時間同步策略增強了系統的適應性和魯棒性,確保在不同環境和設備狀態下都能實現有效的時間同步;
62、4、本發明基于bully選舉算法,綜合考慮cpu主頻和mac地址選舉監控節點。首先篩選cpu主頻最高的節點作為監控候選節點,若候選節點個數大于1,則基于mac地址id選舉出最大mac地址值的節點為監控節點。該選舉機制能夠選出性能更優、唯一性更強的監控節點,提高了監控節點選舉的合理性和準確性。同時當監控節點在預定時間周期內停止發布選舉因子時,能夠及時重新選擇監控節點,保證平臺在節點故障或異常情況下的穩定運行;
63、5、本發明利用5g-cpe進行車間5g蜂窩網連接,實現了特種車輛車隊的高速、低延遲、高可靠通信。5g網絡的高帶寬和低延遲特性支持大量數據的快速傳輸和實時響應,確保了車輛間協同控制的實時性和可靠性;移動性管理和抗干擾技術確保了車輛在高速移動和復雜電磁環境下的通信穩定性。通過與車載嵌入式信息平臺的無縫集成,5g-cpe支持多車協同和時間同步,提升了車隊的運行效率和安全性。同時,5g網絡的加密通信和身份認證機制增強了系統的安全性,確保數據傳輸的保密性和完整性;
64、6、本發明能夠根據守時授時設備的工作狀態和當前日歷信息的有效狀態,靈活調整時間同步模式。當守時授時設備工作狀態發生變化時,監控節點能夠及時判斷并切換到相應的時間同步模式,如從高精度ptp模式切換到低精度ptp模式或本地自主時間同步模式。這種靈活的應對機制,使得車載嵌入式信息平臺能夠快速適應設備狀態的變化,保證時間同步的連續性和穩定性,避免了因設備故障或信號不穩定導致的時間同步中斷,確保了特種車輛在各種作業任務中的高效協調和信息傳輸的準確性。
65、本發明中,上述各技術方案之間還可以相互組合,以實現更多的優選組合方案。本發明的其他特征和優點將在隨后的說明書中闡述,并且,部分優點可從說明書中變得顯而易見,或者通過實施本發明而了解。本發明的目的和其他優點可通過說明書以及附圖中所特別指出的內容中來實現和獲得。
- 還沒有人留言評論。精彩留言會獲得點贊!