無人機測試控制系統的制作方法
本發明屬于電子信息領域,尤其設計涉及一種無人機測試控制系統。
背景技術:
1、無人機在產品化之前,要測試眾多參數。有一些測試項目對無人機的位置信息要求很精確,傳統的無人機測試使用gps定位,但是gps定位存在場地限制,個別場地gps信號不佳就無法進行精準定位。另外gps定位誤差是米級,精度過低。基于以上問題,本發明引入uwb基站定位技術,來實現無人機的10厘米精度定位。
技術實現思路
1、本發明提供了一種基于uwb基站定位的無人機測試控制系統,可以有效解決上述問題。
2、本發明是這樣實現的:
3、本發明提供一種基于uwb基站定位的無人機測試控制系統,包括:
4、布設在地面第一平面上的第一uwb基站、第二uwb基站、第三uwb基站以及第四uwb基站,其中,所述第一uwb基站被設置為基準基站,且同步所述第一uwb基站所處的gps經緯度信息給所述第一uwb基站,并根據所述第一uwb基站所處的gps經緯度信息做所述第二uwb基站、第三uwb基站以及第四uwb基站的二維定位;
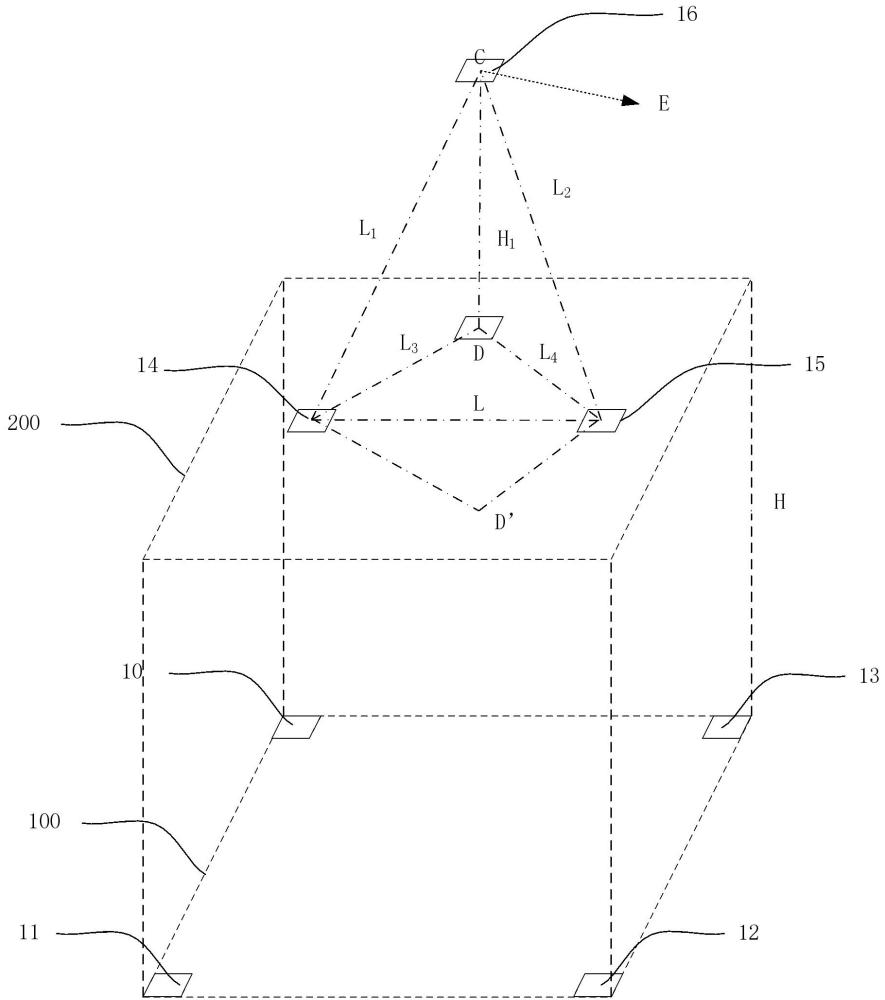
5、所述第一平面合圍所形成的立體空間中設置一與所述第一平面平行的中繼平面;所述中繼平面設置兩個中繼飛行器,且每一中繼飛行器上分別設置有中繼信標,每一中繼飛行器分別通過其中繼信標與所述第一uwb基站、第二uwb基站、第三uwb基站以及第四uwb基站做tdoa算法獲取相對于所述第一uwb基站的絕對位置,然后得到每一中繼飛行器的經緯度信息;且每一中繼飛行器的高度數據通過其上的氣壓計參數獲得;并將每一中繼飛行器的經緯度信息及高度數據發送給基準基站。
6、作為進一步改進的,定義所述中繼平面到所述第一平面的高度為h,且相鄰兩個中繼飛行器之間的水平距離為l,其中,h為10~50米,且l為5~30米。
7、作為進一步改進的,所述基于uwb基站定位的無人機測試控制系統還包括多個障礙物,設置于所述第一平面合圍所處的空間中,以模擬不同的遮擋物。
8、作為進一步改進的,將其中一個中繼飛行器設置為主中繼飛行器,另一架為輔助中繼飛行器,且主中繼飛行器作為輔助中繼飛行器與所述基準基站交互的通道;所述主中繼飛行器與所述基準基站之間無障礙物,且所述主中繼飛行器與每一輔助中繼飛行器之間無障礙物。
9、作為進一步改進的,當待測試的飛行器位于所述第一平面和所述中繼平面所處的空間時,所述待測試的飛行器直接與所述第一uwb基站、第二uwb基站、第三uwb基站以及第四uwb基站做tdoa算法獲取相對于所述第一uwb基站的絕對位置,然后得到待測試的飛行器的經緯度信息;且每一待測試的飛行器的高度數據通過其上的氣壓計參數獲得,從而最終獲得所述待測試的飛行器的位置信息。
10、作為進一步改進的,當待測試的飛行器位于所述中繼平面之上的空間時,所述待測試的飛行器直接與兩個中繼飛行器交互,以獲取其經緯度信息;且每一待測試的飛行器的高度數據通過其上的氣壓計參數獲得,從而最終獲得所述待測試的飛行器的位置信息。
11、作為進一步改進的,所述待測試的飛行器直接與兩個中繼飛行器交互,以獲取其經緯度信息具體包括:獲取所述待測試的飛行器與兩個中繼飛行器之間的距離,并根據所述待測試的飛行器到中繼平面的高度及所述待測試的飛行器的gps信息,獲取所述待測試的飛行器在所述中繼平面的投影位置即其經緯度信息,然后最終獲得所述待測試的飛行器的位置信息。
12、作為進一步改進的,所述待測試的飛行器還包括用于記錄風速的風速儀,且所述無人機測試控制系統進一步用于記錄所述待測試的飛行器從第一位置飛行到第二位置的第一數據,并同時記錄所述待測試的飛行器上測試得到的從第一位置到第二位置的第二數據以及風速數據;所述無人機測試控制系統還進一步根據所述第一數據、第二數據以及風速數據獲取所述待測試的飛行器的抗風等級。
13、本發明的有益效果是:本發明所述基于uwb基站定位的無人機測試控制系統可以解決無人機在定位測試過程中gps定位誤差大,精度低的技術問題,可以實現無人機的準確定位測試。進一步的,本發明的基于uwb基站定位的無人機測試控制系統還可以解決gps存在場地限制的技術問題。另外,本發明的基于uwb基站定位的無人機測試控制系統通過中繼站的設置,還可以大大的擴展所述無人機測試控制系統的測試范圍。
技術特征:
1.一種基于uwb基站定位的無人機測試控制系統,其特征在于,包括:
2.如權利要求1所述的基于uwb基站定位的無人機測試控制系統,其特征在于,定義所述中繼平面到所述第一平面的高度為h,且相鄰兩個中繼飛行器之間的水平距離為l,其中,h為10~50米,且l為5~30米。
3.如權利要求2所述的基于uwb基站定位的無人機測試控制系統,其特征在于,還包括多個障礙物,設置于所述第一平面合圍所處的空間中,以模擬不同的遮擋物。
4.如權利要求3所述的基于uwb基站定位的無人機測試控制系統,其特征在于,將其中一個中繼飛行器設置為主中繼飛行器,其他為輔助中繼飛行器,且主中繼飛行器作為輔助中繼飛行器與所述基準基站交互的通道;所述主中繼飛行器與所述基準基站之間無障礙物,且所述主中繼飛行器與每一輔助中繼飛行器之間無障礙物。
5.如權利要求4所述的基于uwb基站定位的無人機測試控制系統,其特征在于,當待測試的飛行器位于所述第一平面和所述中繼平面所處的空間時,所述待測試的飛行器直接與所述第一uwb基站、第二uwb基站、第三uwb基站以及第四uwb基站做tdoa算法獲取相對于所述第一uwb基站的絕對位置,然后得到待測試的飛行器的經緯度信息;且每一待測試的飛行器的高度數據通過其上的氣壓計參數獲得,從而最終獲得所述待測試的飛行器的位置信息。
6.如權利要求4所述的基于uwb基站定位的無人機測試控制系統,其特征在于,當待測試的飛行器位于所述中繼平面之上的空間時,所述待測試的飛行器直接與兩個中繼飛行器交互,以獲取其經緯度信息;且每一待測試的飛行器的高度數據通過其上的氣壓計參數獲得,從而最終獲得所述待測試的飛行器的位置信息。
7.如權利要求6所述的基于uwb基站定位的無人機測試控制系統,其特征在于,所述待測試的飛行器直接與兩個中繼飛行器交互,以獲取其經緯度信息具體包括:獲取所述待測試的飛行器與兩個中繼飛行器之間的距離,并根據所述待測試的飛行器到中繼平面的高度及所述待測試的飛行器的gps信息,獲取所述待測試的飛行器在所述中繼平面的投影位置即其經緯度信息,然后最終獲得所述待測試的飛行器的位置信息。
8.如權利要求7所述的基于uwb基站定位的無人機測試控制系統,其特征在于,所述待測試的飛行器還包括用于記錄風速的風速儀,且所述無人機測試控制系統進一步用于記錄所述待測試的飛行器從第一位置飛行到第二位置的第一數據,并同時記錄所述待測試的飛行器上測試得到的從第一位置到第二位置的第二數據以及風速數據;所述無人機測試控制系統還進一步根據所述第一數據、第二數據以及風速數據獲取所述待測試的飛行器的抗風等級。
技術總結
本發明提供了一種無人機測試控制系統,包括:布設在地面第一平面上的第一、第二、第三以及第四UWB基站,其中,第一UWB基站被設置為基準基站,且同步第一UWB基站所處的GPS經緯度信息給第一UWB基站,并根據第一UWB基站所處的GPS經緯度信息做第二、第三以及第四UWB基站的二維定位;第一平面合圍形成的立體空間中設置一與第一平面平行的中繼平面;中繼平面設置兩個中繼飛行器,且每一中繼飛行器上分別設置有中繼信標,每一中繼飛行器分別通過其中繼信標與第一、第二、第三以及第四UWB基站做TDOA算法獲取相對于第一UWB基站的絕對位置,然后得到每一中繼飛行器的經緯度信息;且每一中繼飛行器的高度數據通過其上的氣壓計參數獲得。
技術研發人員:黃興智,朱磊,郝秋衡,許毅斌
受保護的技術使用者:廈門云輪智能科技有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!