采用3D和AI視覺傳感可見光機芯的多角度拍攝實現方法與流程
本發明涉及圖像處理的,尤其涉及一種采用3d和ai視覺傳感可見光機芯的多角度拍攝實現方法。
背景技術:
1、隨著計算機視覺技術和人工智能的飛速發展,圖像處理和三維重建技術在多個領域中得到了廣泛應用,傳統的拍攝方法依賴于單一角度的圖像獲取,通常會受到拍攝視角的限制,導致拍攝效果不全面或細節缺失,在一些情況下受限于拍攝對象所處場景的場景限制,拍攝者無法獲得最佳的圖像視覺角度,也缺少側面視角、俯視視角等更多視角的圖像采集機會,導致拍攝者無法得到理想的視角圖像。
技術實現思路
1、本發明的目的在于提供一種采用3d和ai視覺傳感可見光機芯的多角度拍攝實現方法,旨在解決現有技術中受限于場景限制時無法獲得理想的視角圖像的問題。
2、本發明是這樣實現的,第一方面,本發明提供一種采用3d和ai視覺傳感可見光機芯的多角度拍攝實現方法,包括:
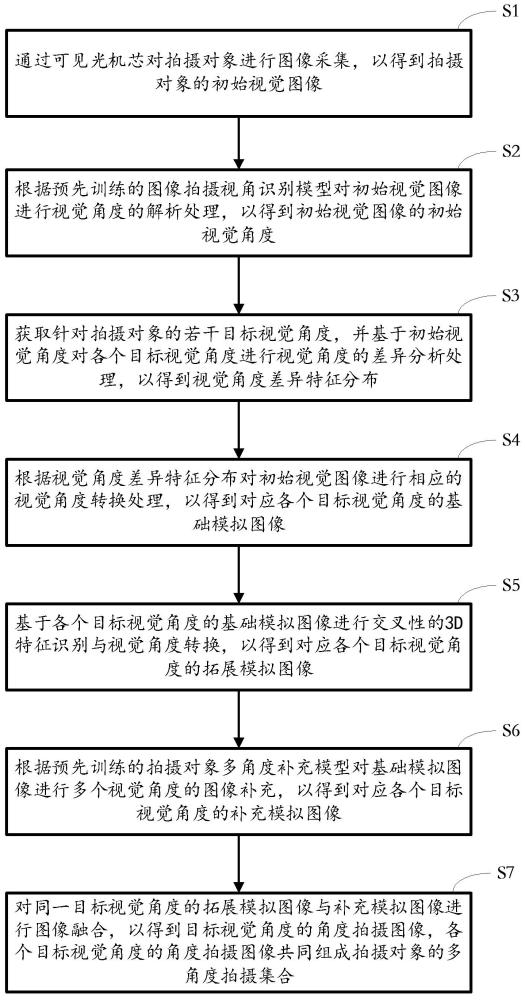
3、通過可見光機芯對拍攝對象進行圖像采集,以得到所述拍攝對象的初始視覺圖像;
4、根據預先訓練的圖像拍攝視角識別模型對所述初始視覺圖像進行視覺角度的解析處理,以得到所述初始視覺圖像的初始視覺角度;
5、獲取針對所述拍攝對象的若干目標視覺角度,并基于所述初始視覺角度對各個所述目標視覺角度進行視覺角度的差異分析處理,以得到視覺角度差異特征分布;其中,所述視覺角度差異特征分布包括若干視覺角度差異特征,所述視覺角度差異特征用于描述所述初始視覺角度與所述目標視覺角度之間的視覺角度差異;
6、根據所述視覺角度差異特征分布對所述初始視覺圖像進行相應的視覺角度轉換處理,以得到對應各個所述目標視覺角度的基礎模擬圖像;
7、基于各個所述目標視覺角度的基礎模擬圖像進行交叉性的3d特征識別與視覺角度轉換,以得到對應各個所述目標視覺角度的拓展模擬圖像;
8、根據預先訓練的拍攝對象多角度補充模型對所述基礎模擬圖像進行多個視覺角度的圖像補充,以得到對應各個所述目標視覺角度的補充模擬圖像;
9、對同一所述目標視覺角度的拓展模擬圖像與補充模擬圖像進行圖像融合,以得到所述目標視覺角度的角度拍攝圖像,各個所述目標視覺角度的角度拍攝圖像共同組成所述拍攝對象的多角度拍攝集合;其中,所述多角度拍攝集合用于對所述拍攝對象進行多角度的圖像視覺描繪。
10、本發明提供了一種采用3d和ai視覺傳感可見光機芯的多角度拍攝實現方法,具有以下有益效果:
11、本發明使用可見光機芯采集拍攝對象的初始圖像,通過圖像拍攝視角識別模型分析初始圖像得到初始視覺角度,基于初始視覺角度分析目標視覺角度與初始視覺角度的差異,得到視覺角度差異特征分布,根據差異特征分布生成基礎模擬圖像,并進行交叉3d特征識別與角度轉換生成拓展模擬圖像,利用多角度補充模型得到補充模擬圖像,對拓展與補充模擬圖像進行融合,生成多角度拍攝圖像集,該方法通過3d與ai視覺技術,自動生成多角度、高質量的拍攝圖像,有效提升了圖像采集的全面性與精確性,解決了現有技術中受限于場景限制時無法獲得理想的視角圖像的問題。
技術特征:
1.一種采用3d和ai視覺傳感可見光機芯的多角度拍攝實現方法,其特征在于,包括:
2.如權利要求1所述的采用3d和ai視覺傳感可見光機芯的多角度拍攝實現方法,其特征在于,所述圖像拍攝視角識別模型的預先訓練步驟包括:
3.如權利要求1所述的采用3d和ai視覺傳感可見光機芯的多角度拍攝實現方法,其特征在于,基于所述初始視覺角度對各個所述目標視覺角度進行視覺角度的差異分析處理,以得到視覺角度差異特征分布的步驟包括:
4.如權利要求1所述的采用3d和ai視覺傳感可見光機芯的多角度拍攝實現方法,其特征在于,根據所述視覺角度差異特征分布對所述初始視覺圖像進行相應的視覺角度轉換處理,以得到對應各個所述目標視覺角度的基礎模擬圖像的步驟包括:
5.如權利要求4所述的采用3d和ai視覺傳感可見光機芯的多角度拍攝實現方法,其特征在于,根據所述視覺角度差異特征對所述3d視覺特征圖譜進行圖像內容表達模式的轉換分析,以得到所述拍攝對象對應所述視覺角度差異特征的3d結構表達向量集合的步驟包括:
6.如權利要求1所述的采用3d和ai視覺傳感可見光機芯的多角度拍攝實現方法,其特征在于,基于各個所述目標視覺角度的基礎模擬圖像進行交叉性的3d特征識別與視覺角度轉換,以得到對應各個所述目標視覺角度的拓展模擬圖像的步驟包括:
7.如權利要求1所述的采用3d和ai視覺傳感可見光機芯的多角度拍攝實現方法,其特征在于,所述拍攝對象多角度補充模型的預先訓練包括:
8.如權利要求1所述的采用3d和ai視覺傳感可見光機芯的多角度拍攝實現方法,其特征在于,對同一所述目標視覺角度的拓展模擬圖像與補充模擬圖像進行圖像融合,以得到所述目標視覺角度的角度拍攝圖像的步驟包括:
技術總結
本發明涉及圖像處理的技術領域,公開了一種采用3D和AI視覺傳感可見光機芯的多角度拍攝實現方法,本發明使用可見光機芯采集拍攝對象的初始圖像,通過圖像拍攝視角識別模型分析初始圖像得到初始視覺角度,基于初始視覺角度分析目標視覺角度與初始視覺角度的差異,得到視覺角度差異特征分布,根據差異特征分布生成基礎模擬圖像,并進行交叉3D特征識別與角度轉換生成拓展模擬圖像,利用多角度補充模型得到補充模擬圖像,對拓展與補充模擬圖像進行融合,生成多角度拍攝圖像集,該方法通過3D與AI視覺技術,自動生成多角度、高質量的拍攝圖像,有效提升了圖像采集的全面性與精確性,解決了現有技術中受限于場景限制時無法獲得理想的視角圖像的問題。
技術研發人員:李祥
受保護的技術使用者:安科優選(深圳)技術有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!