播種機(jī)及播種方法與流程
本發(fā)明涉及向農(nóng)地播種的播種機(jī)及播種方法,尤其涉及向灌水狀態(tài)的農(nóng)地以恒定的間隔播種的播種機(jī)及播種方法。
背景技術(shù):
1、伴隨于農(nóng)業(yè)從事者的高齡化、農(nóng)產(chǎn)品流通的全球化,農(nóng)活的省力化、農(nóng)產(chǎn)品生產(chǎn)成本的降低成為了應(yīng)該解決的課題。為了解決這些課題,例如,在水稻栽培中,以節(jié)省育苗、移植的勞力為目的,向農(nóng)地(以下,有時(shí)記為水田)直接播撒種子的直播法正在普及。在直播法中的向灌水狀態(tài)的農(nóng)地直接播撒種子的灌水直播法中使用的鐵粉包覆稻種的制造方法的一例記載于專利文獻(xiàn)1。該鐵粉包覆稻種通過向稻種包覆比重高的鐵粉而構(gòu)成,因此容易沉入水中。因而,在灌水直播法中,專利文獻(xiàn)1所記載的種子的使用存在能夠防止或抑制灌水狀態(tài)的水田中的種子的漂浮、流出而且能夠防止或抑制鳥害等優(yōu)點(diǎn),因此受到關(guān)注。
2、另外,在專利文獻(xiàn)2中記載了向灌水狀態(tài)的農(nóng)地播種的灌水直播機(jī)的一例,該灌水直播機(jī)構(gòu)成為防止由因在農(nóng)地行駛而從農(nóng)地飛散的泥引起的動(dòng)力傳遞部的臟污。在專利文獻(xiàn)3中記載了能夠控制灌水田面的種子的埋沒深度的播種機(jī)。在專利文獻(xiàn)4中記載了具備能夠?qū)崿F(xiàn)灌水直播的被稱作耙裝置的耙地旋轉(zhuǎn)裝置的播種機(jī)。在專利文獻(xiàn)5中記載了基于從gnss(global?navigation?satellite?system:全球?qū)Ш叫l(wèi)星系統(tǒng))的測(cè)位衛(wèi)星接收到的電波而取得插秧機(jī)等作業(yè)車輛的位置信息且使用該位置信息的作業(yè)車輛的自主行駛系統(tǒng)。
3、現(xiàn)有技術(shù)文獻(xiàn)
4、專利文獻(xiàn)
5、專利文獻(xiàn)1:日本專利第4441645號(hào)公報(bào)
6、專利文獻(xiàn)2:日本特開2013-21943號(hào)公報(bào)
7、專利文獻(xiàn)3:日本專利第6559978號(hào)公報(bào)
8、專利文獻(xiàn)4:日本特開2021-180650號(hào)公報(bào)
9、專利文獻(xiàn)5:日本特開2022-111121號(hào)公報(bào)
技術(shù)實(shí)現(xiàn)思路
1、發(fā)明所要解決的課題
2、在使播種機(jī)在灌水狀態(tài)的水田行駛而進(jìn)行條播或點(diǎn)播時(shí),有時(shí)將因播種機(jī)在水田行駛而形成的車轍、由標(biāo)記器形成的筋等作為播種機(jī)的行駛位置的大致目標(biāo)。然而,在灌水直播法中,上述的車轍、筋等位于水面下而不容易看見,因此播種機(jī)的行駛位置的掌握變得困難,由此,難以向規(guī)定的位置播種。另外,若因播種機(jī)的行駛而卷起泥,則進(jìn)一步不容易確認(rèn)車轍、筋等,伴隨于此而進(jìn)一步難以向規(guī)定的位置播種。因而,以往,為了在灌水狀態(tài)的水田中向規(guī)定的位置播種,需要暫且排水而使水田的土壤表面露出。另外,若水田的土壤因排水而露出,則會(huì)在排水狀態(tài)的水田生長雜草,或者,雜草容易繁茂,灌水直播法的上述的優(yōu)點(diǎn)有可能受損。因而,在向灌水狀態(tài)的水田播種后,需要快速地復(fù)水。也就是說,以往,在灌水直播法中,即使使用了專利文獻(xiàn)1所記載的鐵粉包覆稻種,也會(huì)花費(fèi)排水及復(fù)水的勞力,而且,相應(yīng)地,不得不多余地使用水資源,在這些方面還有改良的余地。
3、另外,即使在使用專利文獻(xiàn)2所記載的灌水直播機(jī)、專利文獻(xiàn)3及專利文獻(xiàn)4所記載的播種機(jī)中的任一者而向灌水狀態(tài)的水田條播或點(diǎn)播的情況下,為了確認(rèn)灌水直播機(jī)、播種機(jī)的行駛位置而向規(guī)定的位置播種,也不得不暫且排水。因而,存在與上述的專利文獻(xiàn)1同樣的課題。
4、在將專利文獻(xiàn)5所記載的自主行駛系統(tǒng)例如搭載于向灌水狀態(tài)的農(nóng)地播種的播種機(jī)且產(chǎn)生了無法接收來自測(cè)位衛(wèi)星的信號(hào)的事態(tài)的情況下,無法確定播種機(jī)的位置,存在會(huì)向已經(jīng)播種過的地方播種、殘留未播種的地方的可能性。其結(jié)果,有可能無法向農(nóng)地整體有規(guī)律地播種。
5、本發(fā)明為了解決上述課題而完成,目的在于提供在灌水狀態(tài)的農(nóng)地中也能夠容易地掌握行駛位置且能夠向規(guī)定的位置播種的播種機(jī)及播種方法。
6、用于解決課題的手段
7、本發(fā)明為了達(dá)成上述的目的而作出以下方案,
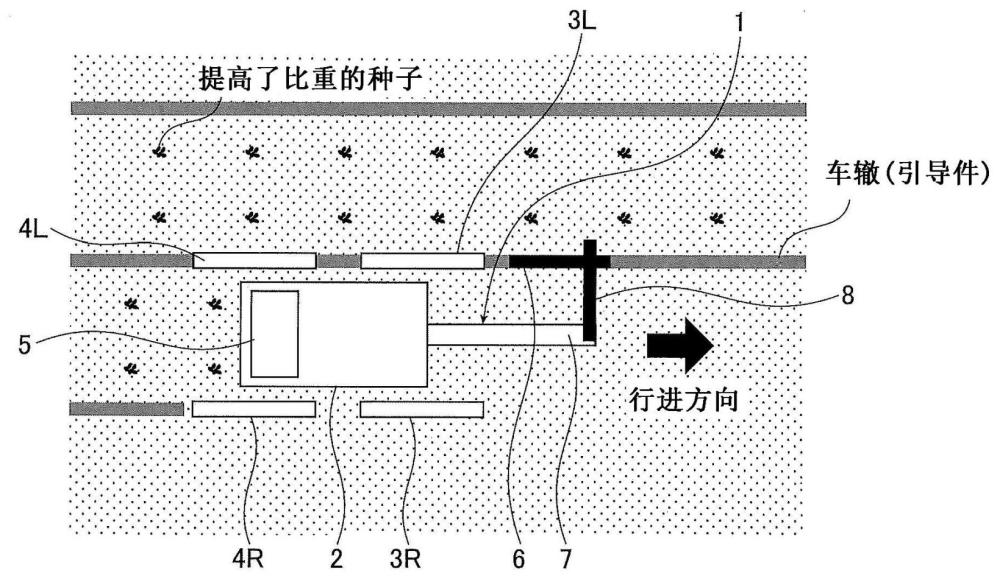
8、[1]?一種播種機(jī),在支承于構(gòu)成為能夠在灌水狀態(tài)的農(nóng)地行駛的車輪的基體設(shè)置有向所述農(nóng)地播撒種子的播種器,其中,所述播種機(jī)具備設(shè)置于所述基體的位置檢測(cè)裝置,所述位置檢測(cè)裝置將由所述車輪形成于所述農(nóng)地的車轍、預(yù)先形成于所述農(nóng)地的水路、預(yù)先形成于所述農(nóng)地的線狀的槽及呈直線狀地預(yù)先張?jiān)O(shè)于所述農(nóng)地的有撓性的線狀體中的至少任一個(gè)作為引導(dǎo)件且與所述引導(dǎo)件卡合。
9、[2]?根據(jù)[1]所述的播種機(jī),所述位置檢測(cè)裝置將由所述車輪形成于所述農(nóng)地的車轍、預(yù)先形成于所述農(nóng)地的水路及預(yù)先形成于所述農(nóng)地的線狀的槽中的至少任一個(gè)作為引導(dǎo)件,通過所述基體相對(duì)于所述引導(dǎo)件在相對(duì)于行進(jìn)方向的左右方向上移動(dòng)而在所述左右方向上變形或者在所述左右方向上擺動(dòng)。
10、[3]?根據(jù)[2]所述的播種機(jī),所述位置檢測(cè)裝置構(gòu)成為桿狀,在所述基體設(shè)置有支承機(jī)構(gòu),所述支承機(jī)構(gòu)構(gòu)成為在所述左右方向上在所述位置檢測(cè)裝置與所述基體之間空出預(yù)先確定的間隔地支承所述位置檢測(cè)裝置。
11、[4]?根據(jù)[1]所述的播種機(jī),所述位置檢測(cè)裝置將呈直線狀地預(yù)先張?jiān)O(shè)于所述農(nóng)地的有撓性的線狀體作為引導(dǎo)件,相對(duì)于所述線狀體以能夠相對(duì)移動(dòng)的方式卡合。
12、[5]?根據(jù)[4]所述的播種機(jī),所述位置檢測(cè)裝置具有縫隙和孔中的任一方,所述縫隙構(gòu)成為將所述線狀體以能夠相對(duì)移動(dòng)的方式卡合,所述孔在所述位置檢測(cè)裝置的板厚方向上貫通形成為將所述線狀體以能夠相對(duì)移動(dòng)的方式卡合。
13、[6]?根據(jù)[1]所述的播種機(jī),所述播種機(jī)還具備基于從衛(wèi)星測(cè)位系統(tǒng)取得的信號(hào)而取得位置信息的位置信息取得裝置。
14、[7]?一種播種方法,使用[1]~[5]中任一項(xiàng)所述的播種機(jī)而播種種子。
15、[8]?根據(jù)[7]所述的播種方法,所述種子在表面包覆有包含金屬材料的種子包覆劑,所述種子的比重為1.2g/cm3以上且4.0g/cm3以下。
16、發(fā)明效果
17、根據(jù)本發(fā)明,在灌水狀態(tài)的農(nóng)地中,將由播種機(jī)的車輪形成的車轍、預(yù)先形成于農(nóng)地的水路、預(yù)先形成于農(nóng)地的線狀的槽及呈直線狀地預(yù)先張?jiān)O(shè)于農(nóng)地的有撓性的線狀體中的至少任一個(gè)作為引導(dǎo)件。并且,在使播種機(jī)沿著該引導(dǎo)件行駛時(shí),位置檢測(cè)裝置與所述引導(dǎo)件卡合。在播種機(jī)正在沿著引導(dǎo)件行駛的情況下,位置檢測(cè)裝置以相對(duì)于引導(dǎo)件保持大致恒定的距離的狀態(tài)與播種機(jī)一起移動(dòng),因此不會(huì)在相對(duì)于行進(jìn)方向的左右方向上變形或擺動(dòng)。或者,這樣的變形、擺動(dòng)與播種機(jī)以相對(duì)于引導(dǎo)件接近及遠(yuǎn)離的方式在左右方向上移動(dòng)的情況相比較小。相對(duì)于此,若播種機(jī)以相對(duì)于引導(dǎo)件接近及遠(yuǎn)離的方式在左右方向上移動(dòng),則引導(dǎo)件與位置檢測(cè)裝置之間的距離變化,伴隨于此,位置檢測(cè)裝置在左右方向上變形或擺動(dòng)。因而,能夠基于位置檢測(cè)裝置的變形量、擺動(dòng)的大小而掌握在左右方向上相對(duì)于引導(dǎo)件的當(dāng)前時(shí)間點(diǎn)下的播種機(jī)的位置。即,能夠判斷是否正在沿著引導(dǎo)件行駛。在播種機(jī)將線狀體作為引導(dǎo)件而行駛的情況下,若播種機(jī)在相對(duì)于行進(jìn)方向的左右方向上移動(dòng),則線狀體在線狀體與位置檢測(cè)裝置的卡合處彎折。能夠利用該線狀體的彎折角度來掌握播種機(jī)相對(duì)于線狀體的位置。其結(jié)果,在灌水狀態(tài)的農(nóng)地中也能夠使播種機(jī)沿著引導(dǎo)件行駛,能夠向規(guī)定的位置播種。另外,由于位置檢測(cè)裝置設(shè)置于播種機(jī)的基體,所以能夠容易地進(jìn)行左右方向上的播種機(jī)相對(duì)于引導(dǎo)件的行駛位置的掌握及播種機(jī)的行駛位置的修正。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!