一種干旱區(qū)果園的智能灌溉系統(tǒng)
本發(fā)明涉及智能灌溉,特別涉及一種干旱區(qū)果園的智能灌溉系統(tǒng)。
背景技術(shù):
1、智能灌溉是一種先進(jìn)的農(nóng)業(yè)灌溉方式,它具有自動化、精準(zhǔn)化、智能化等優(yōu)勢,可以提高農(nóng)業(yè)生產(chǎn)效率、節(jié)約水資源和環(huán)境資源,同時也可以提高農(nóng)民的經(jīng)濟(jì)效益和農(nóng)作物的產(chǎn)量和質(zhì)量。正確的灌溉對果樹有多方面的益處,不合理的灌溉則會對果樹生長結(jié)果產(chǎn)生負(fù)面影響。
2、現(xiàn)有技術(shù)中,果園智能灌溉大部分基于土壤天氣條件,比如土壤溫度、空氣濕度和空氣溫度等因素,沒有基于多個維度分析其他影響需求量的因素。中國發(fā)明專利cn118696809a公開了一種丘陵山地果園精細(xì)灌溉方法,包括監(jiān)測得到低分辨率的土壤含水量分布圖;無人機(jī)采集果園dom和dsm;從dom中識別地面點(diǎn)對應(yīng)到將dsm中并插值生成dem;以dom提取單株果樹編碼并生成果樹區(qū)域矢量文件;以dem、低分辨率的土壤含水量分布圖、果樹區(qū)域矢量文件得到單株果樹周圍土壤監(jiān)測結(jié)果圖;將果樹編碼與灌溉裝置電磁閥對應(yīng);以干旱監(jiān)測結(jié)果圖生成精細(xì)灌溉處方圖控制電磁閥灌溉。可見,該專利沒有公開沒有考慮到每種作物或植物所需水量的差異,以及沒有考慮到影響土壤的天氣因素的不確定導(dǎo)致的差異,使得最后得到的灌溉策略不夠精準(zhǔn),可能存在部分水資源沒有得到充分利用以及能源消耗大的問題。
技術(shù)實(shí)現(xiàn)思路
1、本技術(shù)實(shí)施例提供了一種干旱區(qū)果園的智能灌溉系統(tǒng),用于解決智能灌溉存在水資源浪費(fèi)和能源消耗大的問題。
2、本技術(shù)實(shí)施例第一方面提供了一種干旱區(qū)果園的智能灌溉系統(tǒng),包括:
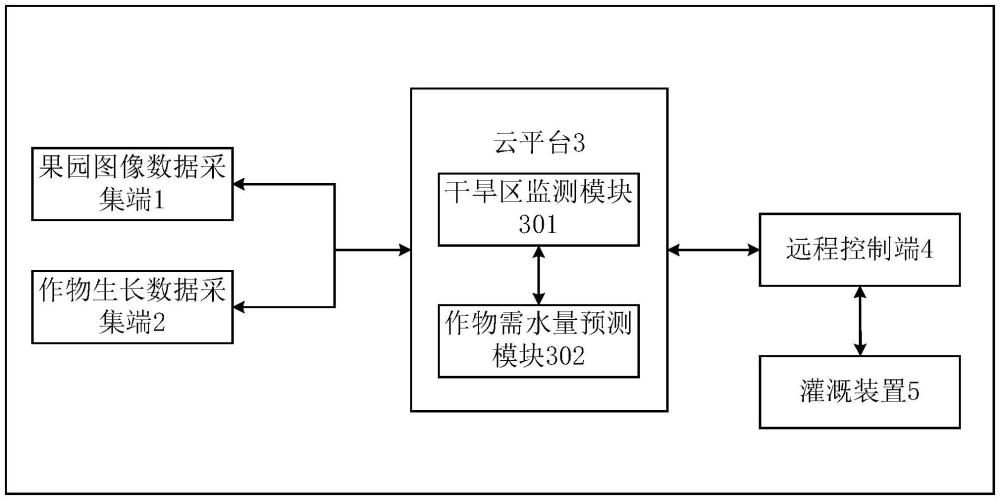
3、果園圖像數(shù)據(jù)采集端、作物生長數(shù)據(jù)采集端、云平臺、遠(yuǎn)程控制端和灌溉裝置,所述云平臺分別連接所述果園圖像數(shù)據(jù)采集端、作物生長數(shù)據(jù)采集端和遠(yuǎn)程控制端,所述遠(yuǎn)程控制端連接所述灌溉裝置;
4、所述果園圖像數(shù)據(jù)采集端通過無人機(jī)實(shí)時拍攝果園中作物的圖像信息,并將拍攝到的圖像上傳至所述云平臺;
5、所述作物生長數(shù)據(jù)采集端通過傳感器采集作物多維度的生長數(shù)據(jù),并將采集到的數(shù)據(jù)上傳至所述云平臺;
6、所述云平臺包括干旱區(qū)監(jiān)測模塊和作物需水量預(yù)測模塊,所述干旱區(qū)監(jiān)測模塊用于對果園中作物的圖像信息進(jìn)行圖像識別,確定果園的潛在干旱區(qū)域;所述作物需水量預(yù)測模塊用于將干旱區(qū)作物的生長數(shù)據(jù)進(jìn)行分析預(yù)測,得到干旱區(qū)作物在預(yù)設(shè)時間內(nèi)的需水量;所述云平臺將所述干旱區(qū)監(jiān)測模塊和作物需水量預(yù)測模塊生成的分析結(jié)果傳輸至所述遠(yuǎn)程控制端;
7、所述遠(yuǎn)程控制端用于將所述云平臺傳輸?shù)姆治鼋Y(jié)果進(jìn)行分析,確定干旱區(qū)域?qū)?yīng)的灌溉策略,并通過確定的灌溉策略控制所述灌溉裝置進(jìn)行智能灌溉。
8、更進(jìn)一步地,所述干旱區(qū)監(jiān)測模塊的工作方法包括:
9、基于接收到的圖像信息進(jìn)行網(wǎng)格化劃分,將劃分的每個網(wǎng)格對應(yīng)的數(shù)據(jù)進(jìn)行預(yù)處理;
10、將預(yù)處理后的數(shù)據(jù)輸入至預(yù)設(shè)的果園卷積神經(jīng)網(wǎng)絡(luò)中,輸出得到每個網(wǎng)格的概率向量,所述概率向量包含干旱元素和非干旱元素;
11、根據(jù)所述概率向量確定果園中所有潛在干旱區(qū)的分布情況。
12、更進(jìn)一步地,所述預(yù)設(shè)的果園卷積神經(jīng)網(wǎng)絡(luò)的訓(xùn)練過程包括如下:
13、采集無人機(jī)拍攝的歷史果園圖像,歷史果園圖像包括不同季節(jié)、不同時間和不同天氣條件下的果園情況的干旱狀態(tài)和非干旱狀態(tài)的信息;
14、將采集到的歷史果園圖像進(jìn)行數(shù)據(jù)預(yù)處理,并將預(yù)處理后的數(shù)據(jù)輸入構(gòu)建的模型中,模型包括第一層卷積層、第二層卷積層、池化層、第一層全連接層和第二層全連接層;
15、利用二元交叉熵?fù)p失函數(shù)和優(yōu)化器通過多次迭代訓(xùn)練,當(dāng)達(dá)到預(yù)設(shè)訓(xùn)練輪數(shù)后模型訓(xùn)練完成,輸出得到包含干旱區(qū)域和非干旱區(qū)域的概率向量。
16、更進(jìn)一步地,所述作物需水量預(yù)測模塊的工作方法包括:
17、采集干旱區(qū)作物的品種數(shù)據(jù)、干旱區(qū)土壤質(zhì)地數(shù)據(jù)以及干旱區(qū)氣象數(shù)據(jù);
18、根據(jù)采集到的數(shù)據(jù)構(gòu)建作物生長模型,通過構(gòu)建的作物生長模型確定干旱區(qū)作物在預(yù)設(shè)時間內(nèi)的需水量。
19、更進(jìn)一步地,所述根據(jù)采集到的數(shù)據(jù)構(gòu)建作物生長模型,通過構(gòu)建的作物生長模型確定干旱區(qū)作物在預(yù)設(shè)時間內(nèi)的需水量,包括:
20、基于干旱區(qū)作物的品種數(shù)據(jù)和干旱區(qū)氣象數(shù)據(jù)構(gòu)建光合作用模擬模型;
21、基于干旱區(qū)作物的品種數(shù)據(jù)和干旱區(qū)氣象數(shù)據(jù)構(gòu)建呼吸作用模擬模型;
22、基于干旱區(qū)作物的品種數(shù)據(jù)、干旱區(qū)土壤質(zhì)地數(shù)據(jù)以及干旱區(qū)氣象數(shù)據(jù)構(gòu)建蒸騰作用模擬模型;
23、根據(jù)構(gòu)建的光合作用模擬模型、呼吸作用模擬模型和蒸騰作用模擬模型確定作物生長模型,并基于所述作物生長模型確定干旱區(qū)作物在預(yù)設(shè)時間內(nèi)不同生長階段的需水量。
24、更進(jìn)一步地,所述光合作用模擬模型、呼吸作用模擬模型和蒸騰作用模擬模型的表達(dá)式包括:
25、光合作用模擬模型:
26、
27、其中:pn為凈光合速率,pmax為最大光合速率,i為光照強(qiáng)度,k為光飽和點(diǎn)對應(yīng)的光照強(qiáng)度,t為實(shí)際溫度,tmin、tmax和topt分別為光合作用的最低溫度、最高溫度和最適溫度;
28、呼吸作用模擬模型:
29、
30、其中:r為呼吸速率,rm為參考溫度下的基礎(chǔ)呼吸速率,tref為參考溫度;
31、蒸騰作用模擬模型:
32、
33、其中:gs為氣孔導(dǎo)度,gs0為初始?xì)饪讓?dǎo)度,m為氣孔對光合速率和胞間二氧化碳濃度變化的敏感度系數(shù),a為光合速率,cs為胞間二氧化碳濃度。
34、更進(jìn)一步地,所述遠(yuǎn)程控制端用于將所述云平臺傳輸?shù)姆治鼋Y(jié)果進(jìn)行分析,確定干旱區(qū)域?qū)?yīng)的灌溉策略,并通過確定的灌溉策略控制所述灌溉裝置進(jìn)行智能灌溉,包括:
35、所述遠(yuǎn)程控制端根據(jù)采集到的果園所在區(qū)域的天氣環(huán)境信息確定預(yù)設(shè)時間內(nèi)的降水量;
36、基于確定的降水量和干旱區(qū)作物在預(yù)設(shè)時間內(nèi)的需水量計算預(yù)設(shè)時間內(nèi)干旱區(qū)作物的目標(biāo)需水量;
37、以灌溉時間最短和灌溉量最小為目標(biāo)參數(shù)構(gòu)建目標(biāo)函數(shù);
38、確定約束條件,所述約束條件包括滿足干旱區(qū)作物的目標(biāo)需水量約束、灌溉單元性能約束、灌溉單元同時工作數(shù)量約束、水源供水能力約束和土壤持水能力約束;
39、根據(jù)所述目標(biāo)函數(shù)和約束條件確定各干旱區(qū)對應(yīng)的灌溉策略。
40、更進(jìn)一步地,所述基于確定的降水量和干旱區(qū)作物在預(yù)設(shè)時間內(nèi)的需水量計算預(yù)設(shè)時間內(nèi)干旱區(qū)作物的目標(biāo)需水量,包括:
41、計算確定降水量與干旱區(qū)作物在預(yù)設(shè)時間內(nèi)的需水量的差值;
42、當(dāng)計算得到的差值滿足條件時,則基于干旱區(qū)土壤的持水能力和灌溉裝置的灌溉效率確定灌溉裝置要補(bǔ)充的目標(biāo)水量。
43、更進(jìn)一步地,所述以灌溉時間最短和灌溉量最小為目標(biāo)參數(shù)構(gòu)建目標(biāo)函數(shù),包括:
44、
45、其中:n為灌溉單元,t為灌溉裝置總的灌溉時間,ti為第i個灌溉單元的灌溉時間,q為灌溉裝置總的灌溉量,qi為第i個灌溉單元的灌溉量,z為總的目標(biāo)函數(shù)值,w1和w2分別為t和q的權(quán)重系數(shù),且w1+w2=1。
46、更進(jìn)一步地,所述約束條件包括滿足干旱區(qū)作物的目標(biāo)需水量約束、灌溉單元性能約束、灌溉單元同時工作數(shù)量約束、水源供水能力約束和土壤持水能力約束,包括:
47、滿足干旱區(qū)作物的目標(biāo)需水量約束:
48、
49、其中:qneed為干旱區(qū)作物在預(yù)設(shè)時間內(nèi)所需的水量;
50、灌溉單元性能約束:
51、qi,min≤qi≤qi,max
52、ti,min≤ti≤ti,max
53、其中:qi,min和qi,max分別為第i個灌溉單元的最小和最大允許灌溉量,ti,min和ti,max分別為第i個灌溉單元最短和最長灌溉時間;
54、灌溉單元同時工作數(shù)量約束:
55、
56、其中:m為允許同時工作的最大灌溉單元數(shù)量,xi為0-1變量,xi=1表示第i個灌溉單元正在工作,xi=0表示不工作;
57、水源供水能力約束:
58、
59、其中:qsource為水源每小時的最大供水量;
60、土壤持水能力約束:
61、
62、其中:qinitiαl為土壤初始含水量,qsoil為土壤的最大持水量。
63、從以上技術(shù)方案可以看出,本技術(shù)實(shí)施例具有以下優(yōu)點(diǎn):
64、本發(fā)明利用果園圖像數(shù)據(jù)采集端的無人機(jī)拍攝果園作物圖像,作物生長數(shù)據(jù)采集端的傳感器采集作物生長數(shù)據(jù),將數(shù)據(jù)上傳至云平臺;云平臺中的干旱區(qū)監(jiān)測模塊和作物需水量預(yù)測模塊分別對圖像和生長數(shù)據(jù)進(jìn)行分析處理,得到果園潛在干旱區(qū)域和作物需水量信息,并將結(jié)果傳輸給遠(yuǎn)程控制端;遠(yuǎn)程控制端根據(jù)這些分析結(jié)果確定針對干旱區(qū)域的灌溉策略,進(jìn)而控制灌溉裝置實(shí)施智能灌溉,整個過程形成一個從數(shù)據(jù)采集、分析到?jīng)Q策執(zhí)行的閉環(huán)系統(tǒng),以適應(yīng)干旱區(qū)果園復(fù)雜多變的環(huán)境和作物生長需求。智能灌溉系統(tǒng)通過多種數(shù)據(jù)采集方式,結(jié)合云平臺的數(shù)據(jù)分析和處理能力,以及遠(yuǎn)程控制端的智能決策,實(shí)現(xiàn)對干旱區(qū)果園的精準(zhǔn)灌溉,提高水資源利用效率,保障果園作物的良好生長。
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!