一種高效農作物收割機器人及其控制方法與流程
本發明涉及農作物收割,具體為一種高效農作物收割機器人及其控制方法。
背景技術:
1、在農業生產中,韭菜作為一種常見且經濟價值較高的蔬菜,其收割環節至關重要。傳統的韭菜收割主要依賴人工操作,農民需手持鐮刀等簡單工具,彎腰逐行進行收割。這種方式不僅耗費大量的時間和精力,而且收割效率極低。例如,在大面積的韭菜種植基地,一個熟練的工人一天也只能收割有限的面積,嚴重影響了整體的生產進度。同時,人工收割的質量參差不齊,難以保證每株韭菜的根部預留長度一致,影響了韭菜的后續銷售和食用。
2、目前,市場上也出現了一些用于韭菜收割的機械設備。這些設備大多采用簡單的切割裝置,通過電機驅動切割刀具進行切割,直接將收割后的韭菜傾倒在地面,然后再人工進行收集整理。
3、然而,現有的韭菜收割技術和設備存在諸多問題。在實際操作場景中,當面對不同生長高度和密度的韭菜時,傳統設備無法精準調節切割高度和對韭菜進行有效規整引導。這就導致在收割過程中,韭菜容易散落,后續收集困難,且無法滿足不同用戶對韭菜根部預留長度的多樣化需求。同時,由于缺乏自動化的整理和高效的收集機制,使得整個收割過程仍然需要大量人力參與,人力成本居高不下,工作效率難以提升。這些問題嚴重制約了韭菜收割的現代化和高效化發展。因此,本發明提供了一種高效農作物收割機器人及其控制方法,以解決現有技術中存在的不足之處。
技術實現思路
1、針對現有技術的不足,本發明提供了一種高效農作物收割機器人及其控制方法,解決了現有技術中的韭菜收割設備在收割韭菜后需要人工整理較為麻煩且耗費人力成本的問題。
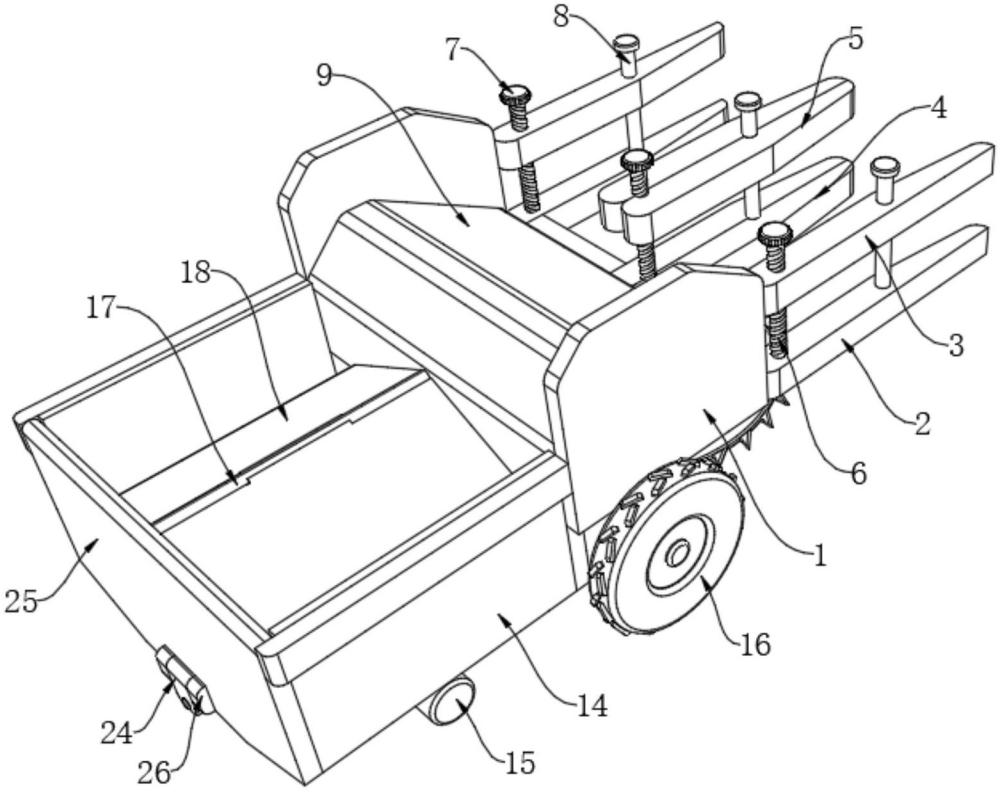
2、為實現以上目的,本發明通過以下技術方案予以實現:一種高效農作物收割機器人,包括u形板架,所述u形板架的一側設置有輔助切割機構,所述輔助切割機構包括兩個固定擋條和兩個活動擋條,兩個所述固定擋條的一端分別固定連接在u形板架的一側靠邊處,所述活動擋條位于固定擋條的正上方,所述u形板架的一側中間位置固定連接有固定中心條,所述固定擋條和固定中心條的頂部均固定連接有導向柱,中間所述導向柱的外側滑動連接有活動中心條,另外兩個所述導向柱的外側均滑動連接有活動擋條,所述固定擋條和固定中心條的頂部均轉動連接有絲桿,所述活動擋條和活動中心條的內側分別與對應的絲桿的外側螺紋連接,所述絲桿的頂部固定連接有轉動盤。
3、優選的,所述u形板架的底部設置有切割機構,所述切割機構包括電動伸縮桿一,所述電動伸縮桿一安裝在u形板架的底部,所述電動伸縮桿一的輸出端固定連接有安裝盒,所述安裝盒的內部安裝有驅動電機,所述驅動電機的輸出端固定連接有切割輪。
4、優選的,所述u形板架的外側設置有移動機構,所述移動機構包括兩個驅動輪,所述驅動輪設置在u形板架的底部,且內置電機驅動,所述u形板架的另一側固定連接有收集斗,所述收集斗的底部轉動連接有兩個滾輪。
5、優選的,所述u形板架的內側設置有收集機構,所述收集機構包括傳送帶,所述傳送帶安裝在u形板架的內側,所述收集斗的內側設置有轉軸,所述轉軸的外部轉動連接有兩個活動板。
6、優選的,所述活動板的底部固定連接有兩個托板,所述托板的底部轉動連接有連桿,所述收集斗的內側安裝有電動伸縮桿二,兩個所述連桿的一端與電動伸縮桿二的輸出端轉動連接。
7、優選的,所述收集斗的外側設置有封蓋機構,所述封蓋機構包括蓋板,所述蓋板轉動連接在收集斗的外側,所述蓋板的外側固定連接有兩個限位塊。
8、優選的,所述收集斗的底部固定連接有安裝塊,所述安裝塊的一端設置有拉簧伸縮桿,所述拉簧伸縮桿的一端轉動連接有擋板,所述擋板的外側與蓋板的外側貼合,所述擋板的外部兩側與兩個限位塊的外側相接觸。
9、一種高效農作物收割機器人的控制方法,包括以下步驟:
10、步驟一、根據農作物的高度調整活動擋條和活動中心條的高度;
11、步驟二、啟動驅動輪和驅動電機使得機器人前進并收割農作物;
12、步驟三、根據收割的農作物密集度來調整兩塊活動板的偏轉角度,并且啟動傳送帶將收割的農作物傳送進收集斗的內部;
13、步驟四、關閉機器人后,打開蓋板取出收集斗內部的農作物。
14、本發明提供了一種高效農作物收割機器人及其控制方法。具備以下有益效果:
15、1、本發明通過自動完成收割、輸送和整理韭菜的全過程,無需大量人力參與,極大節省人力成本,提高工作效率,操作人員手動拉出擋板并轉動,解除對蓋板的限制,即可打開收集斗,這一封蓋機構操作簡單便捷,能快速取出韭菜,相比傳統人工搬運、傾倒等操作,省時省力。
16、2、本發明通過精準調節部件位置,有效規整引導韭菜,確保收割時韭菜整齊,避免散落,方便后續收集,操作人員通過啟動電動伸縮桿微調切割輪高度,伸縮桿伸縮帶動安裝盒、驅動電機和切割輪同步升降,精確控制切割輪與地面距離,滿足不同用戶對韭菜根部預留長度的要求,使收割后的韭菜符合多樣化使用場景。
17、3、本發明通過精準控制切割高度,滿足不同根部預留長度需求,適配多樣化使用場景,啟動驅動輪內置電機和驅動電機,驅動輪轉動讓機器人平穩前行,驅動電機帶動切割輪高速旋轉進行收割,同時,固定擋條、活動擋條、固定中心條和活動中心條將收割的韭菜分成兩份,防止其向兩邊倒下,被割斷的韭菜在它們引導下倒向傳送帶,操作人員啟動傳送帶電機,將韭菜輸送至收集斗,在收集過程中,可根據韭菜密集度啟動電動伸縮桿,通過連桿、托板帶動活動板偏轉,調整其與收集斗間的空隙,讓韭菜均勻堆積在收集斗底層,省去了額外的人力收集成本。
技術特征:
1.一種高效農作物收割機器人,包括u形板架(1),其特征在于,所述u形板架(1)的一側設置有輔助切割機構,所述輔助切割機構包括兩個固定擋條(2)和兩個活動擋條(3),兩個所述固定擋條(2)的一端分別固定連接在u形板架(1)的一側靠邊處,所述活動擋條(3)位于固定擋條(2)的正上方,所述u形板架(1)的一側中間位置固定連接有固定中心條(4),所述固定擋條(2)和固定中心條(4)的頂部均固定連接有導向柱(8),中間所述導向柱(8)的外側滑動連接有活動中心條(5),另外兩個所述導向柱(8)的外側均滑動連接有活動擋條(3),所述固定擋條(2)和固定中心條(4)的頂部均轉動連接有絲桿(6),所述活動擋條(3)和活動中心條(5)的內側分別與對應的絲桿(6)的外側螺紋連接,所述絲桿(6)的頂部固定連接有轉動盤(7)。
2.根據權利要求1所述的一種高效農作物收割機器人,其特征在于,所述u形板架(1)的底部設置有切割機構,所述切割機構包括電動伸縮桿一(10),所述電動伸縮桿一(10)安裝在u形板架(1)的底部,所述電動伸縮桿一(10)的輸出端固定連接有安裝盒(11),所述安裝盒(11)的內部安裝有驅動電機(12),所述驅動電機(12)的輸出端固定連接有切割輪(13)。
3.根據權利要求1所述的一種高效農作物收割機器人,其特征在于,所述u形板架(1)的外側設置有移動機構,所述移動機構包括兩個驅動輪(16),所述驅動輪(16)設置在u形板架(1)的底部,且內置電機驅動,所述u形板架(1)的另一側固定連接有收集斗(14),所述收集斗(14)的底部轉動連接有兩個滾輪(15)。
4.根據權利要求3所述的一種高效農作物收割機器人,其特征在于,所述u形板架(1)的內側設置有收集機構,所述收集機構包括傳送帶(9),所述傳送帶(9)安裝在u形板架(1)的內側,所述收集斗(14)的內側設置有轉軸(17),所述轉軸(17)的外部轉動連接有兩個活動板(18)。
5.根據權利要求4所述的一種高效農作物收割機器人,其特征在于,所述活動板(18)的底部固定連接有兩個托板(19),所述托板(19)的底部轉動連接有連桿(20),所述收集斗(14)的內側安裝有電動伸縮桿二(21),兩個所述連桿(20)的一端與電動伸縮桿二(21)的輸出端轉動連接。
6.根據權利要求3所述的一種高效農作物收割機器人,其特征在于,所述收集斗(14)的外側設置有封蓋機構,所述封蓋機構包括蓋板(25),所述蓋板(25)轉動連接在收集斗(14)的外側,所述蓋板(25)的外側固定連接有兩個限位塊(26)。
7.根據權利要求6所述的一種高效農作物收割機器人,其特征在于,所述收集斗(14)的底部固定連接有安裝塊(22),所述安裝塊(22)的一端設置有拉簧伸縮桿(23),所述拉簧伸縮桿(23)的一端轉動連接有擋板(24),所述擋板(24)的外側與蓋板(25)的外側貼合,所述擋板(24)的外部兩側與兩個限位塊(26)的外側相接觸。
8.一種高效農作物收割機器人的控制方法,其特征在于,應用于任一項權利要求1-7所述的一種高效農作物收割機器人,包括以下步驟:
技術總結
本發明涉及農作物收割技術領域,公開了一種高效農作物收割機器人及其控制方法,包括U形板架,所述U形板架的一側設置有輔助切割機構,所述輔助切割機構包括兩個固定擋條和兩個活動擋條,兩個所述固定擋條的一端分別固定連接在U形板架的一側靠邊處,所述活動擋條位于固定擋條的正上方,所述U形板架的一側中間位置固定連接有固定中心條,所述固定擋條和固定中心條的頂部均固定連接有導向柱。通過自動完成收割、輸送和整理韭菜的全過程,無需大量人力參與,極大節省人力成本,提高工作效率,操作人員手動拉出擋板并轉動,解除對蓋板的限制,即可打開收集斗,能快速取出韭菜,相比傳統人工搬運、傾倒等操作,省時省力。
技術研發人員:楊上海,趙真,崔海越
受保護的技術使用者:楊上海
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!