一種基于機(jī)器視覺的自適應(yīng)沙棘采收裝置
本發(fā)明涉及沙棘采收的,尤其涉及一種基于機(jī)器視覺的自適應(yīng)沙棘采收裝置。
背景技術(shù):
1、如今,沙棘果的主要采收方式仍依賴人工,效率低、成本高,無法實(shí)現(xiàn)對大規(guī)模種植的沙棘進(jìn)行完全采收。近年來,隨著機(jī)器視覺技術(shù)的成熟與進(jìn)步,為沙棘果的自動化采收提供了更加高效、智能化方案。目前,針對沙棘果采收領(lǐng)域的自走式設(shè)備研究尚處于起步階段,且大多局限于傳統(tǒng)農(nóng)機(jī)的范疇,智能化程度不足。這些設(shè)備多依靠駕駛?cè)藛T手動調(diào)節(jié),無法科學(xué)且實(shí)時的調(diào)節(jié)機(jī)構(gòu),且切割范圍往往固定不變,導(dǎo)致了較高的漏割率,還可能對沙棘果樹造成不必要的傷害。通過加裝視覺模塊,可以實(shí)現(xiàn)采收的自動實(shí)時調(diào)節(jié)。因此,研制智能化程度更高、可自動調(diào)節(jié)的具有機(jī)器視覺的沙棘采收裝置才是未來的發(fā)展趨勢。
2、本發(fā)明則采用工業(yè)相機(jī)以獲取沙棘果樹的圖像信息,通過算法識別果實(shí)、枝葉和背景,提取果實(shí)的位置、大小和成熟度等特征,并基于圖像信息,定位果實(shí)的三維坐標(biāo),為執(zhí)行機(jī)構(gòu)提供最佳采收位置。
技術(shù)實(shí)現(xiàn)思路
1、針對上述產(chǎn)生的沙棘采收裝置智能化不足、無法根據(jù)樹枝狀態(tài)實(shí)時調(diào)整各機(jī)構(gòu)位置、易對樹木造成傷害的問題,通過加裝視覺模塊的方式,本發(fā)明的目的在于提供一種基于機(jī)器視覺的自適應(yīng)沙棘采收裝置。
2、為了實(shí)現(xiàn)上述目的,本發(fā)明采取的技術(shù)方案為:
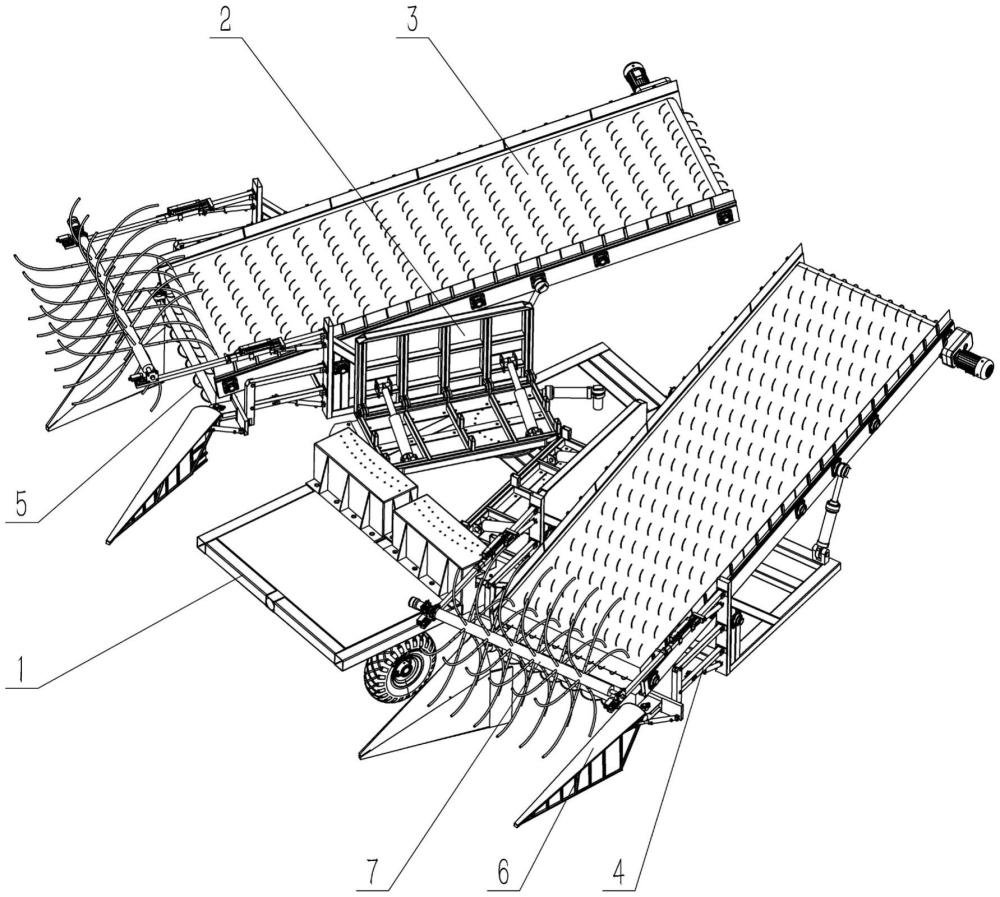
3、一種基于機(jī)器視覺的自適應(yīng)沙棘采收裝置,其中,包括:車架1、液壓驅(qū)動系統(tǒng)、控制系統(tǒng)和沙棘采收機(jī)構(gòu),車架1上安裝有一個或兩個沙棘采收機(jī)構(gòu);當(dāng)車架1上安裝有一個沙棘采收機(jī)構(gòu)時,沙棘采收機(jī)構(gòu)設(shè)置在車架1的左側(cè)或右側(cè);當(dāng)車架1上安裝有兩個沙棘采收機(jī)構(gòu)時,兩個沙棘采收機(jī)構(gòu)設(shè)置在車架1的左、右兩側(cè);
4、所述沙棘采收機(jī)構(gòu)包括:翻折機(jī)構(gòu)2、輸送機(jī)構(gòu)3、高度調(diào)整機(jī)構(gòu)4、切割機(jī)構(gòu)5、聚枝機(jī)構(gòu)6和撥枝機(jī)構(gòu)7,翻折機(jī)構(gòu)2轉(zhuǎn)動安裝在車架1上,輸送機(jī)構(gòu)3安裝在翻折機(jī)構(gòu)2上,切割機(jī)構(gòu)5和撥枝機(jī)構(gòu)7通過高度調(diào)整機(jī)構(gòu)4安裝在輸送機(jī)構(gòu)3的前端,聚枝機(jī)構(gòu)6安裝在切割機(jī)構(gòu)5的前端;所述聚枝機(jī)構(gòu)6用于集束沙棘枝條,所述切割機(jī)構(gòu)5用于切割集束的沙棘枝條,所述撥枝機(jī)構(gòu)7用于將切割后的沙棘枝條拋送至輸送機(jī)構(gòu)3上,所述輸送機(jī)構(gòu)3用于將切割后的沙棘枝條移送至堆料處;
5、液壓驅(qū)動系統(tǒng)包括:液壓泵驅(qū)動裝置和電磁閥組,電磁閥組安裝在液壓泵驅(qū)動裝置的輸出端,翻折機(jī)構(gòu)2、輸送機(jī)構(gòu)3、高度調(diào)整機(jī)構(gòu)4、聚枝機(jī)構(gòu)6和撥枝機(jī)構(gòu)7均與電磁閥組通過液壓管路連通;
6、電磁閥組、控制系統(tǒng)、輸送機(jī)構(gòu)3、高度調(diào)整機(jī)構(gòu)4和切割機(jī)構(gòu)5之間電連接,所述控制系統(tǒng)用于控制沙棘采收裝置運(yùn)行。
7、上述的基于機(jī)器視覺的自適應(yīng)沙棘采收裝置,其中,所述翻折機(jī)構(gòu)2包括:回轉(zhuǎn)支撐軸承201、液壓翻折機(jī)202和導(dǎo)向液壓缸204,液壓翻折機(jī)202包括:第一翻折板、第二翻折板和翻折液壓缸,第一翻折板的下側(cè)邊和第二翻折板的側(cè)邊鉸接,第一翻折板和第二翻折板之間安裝有至少一個翻折液壓缸,多個翻折液壓缸用于調(diào)節(jié)第一翻折板和第二翻折板之間的夾角角度;第二翻折板通過回轉(zhuǎn)支撐軸承201轉(zhuǎn)動安裝在車架1的上表面,導(dǎo)向液壓缸204的一端和車架1的上表面轉(zhuǎn)動連接,導(dǎo)向液壓缸204的另一端和第二翻折板的一端轉(zhuǎn)動連接,導(dǎo)向液壓缸204用于驅(qū)動第二翻折板轉(zhuǎn)動。
8、上述的基于機(jī)器視覺的自適應(yīng)沙棘采收裝置,其中,所述翻折機(jī)構(gòu)2還包括:輔助支撐203,輔助支撐203安裝在車架1的上表面,輔助支撐203內(nèi)設(shè)有弧形滑道,第二翻折板的另一端滑移安裝在弧形滑道內(nèi)。
9、上述的基于機(jī)器視覺的自適應(yīng)沙棘采收裝置,其中,所述輸送機(jī)構(gòu)3包括:支架301、傳送帶302和升降液壓缸303,支架301安裝在第一翻折板上,傳送帶302的前部的兩側(cè)分別與支架301的前端的兩側(cè)轉(zhuǎn)動連接,兩個升降液壓缸303對稱設(shè)置,兩個升降液壓缸303的缸體端部分別與支架301的后端的兩側(cè)轉(zhuǎn)動連接,兩個升降液壓缸303的缸桿端部分別與傳送帶302的后部的兩側(cè)轉(zhuǎn)動連接;兩個升降液壓缸303用于驅(qū)動傳送帶302繞支架301的前端轉(zhuǎn)動。
10、上述的基于機(jī)器視覺的自適應(yīng)沙棘采收裝置,其中,所述高度調(diào)整機(jī)構(gòu)4包括:后支撐板401、撥枝輪調(diào)節(jié)桿405、撥枝輪支撐桿406、電推缸407、電推缸連接件408和撥枝輪液壓缸411,兩個后支撐板401分別安裝在支架301的前端的兩側(cè),每一個撥枝輪調(diào)節(jié)桿405的后端轉(zhuǎn)動安裝在一個后支撐板401的上端,每一個撥枝輪調(diào)節(jié)桿405的下方設(shè)有一個撥枝輪液壓缸411,撥枝輪液壓缸411的缸體端部轉(zhuǎn)動安裝在后支撐板401上,撥枝輪液壓缸411的缸桿端部轉(zhuǎn)動安裝在撥枝輪調(diào)節(jié)桿405的中部;所述撥枝輪液壓缸411用于驅(qū)動撥枝輪調(diào)節(jié)桿405轉(zhuǎn)動;每一個撥枝輪支撐桿406插裝在一個撥枝輪調(diào)節(jié)桿405的前端,該撥枝輪調(diào)節(jié)桿405的前端與一個電推缸407的缸體連接,該撥枝輪支撐桿406的中部與該電推缸407的缸桿端部通過一個電推缸連接件408連接,所述電推缸407用于驅(qū)動撥枝輪支撐桿406沿?fù)苤喺{(diào)節(jié)桿405滑移。
11、上述的基于機(jī)器視覺的自適應(yīng)沙棘采收裝置,其中,所述高度調(diào)整機(jī)構(gòu)4還包括:工業(yè)攝像頭409,每一個撥枝輪支撐桿406的前端安裝有一個工業(yè)攝像頭409,所述工業(yè)攝像頭409與控制系統(tǒng)電連接。
12、上述的基于機(jī)器視覺的自適應(yīng)沙棘采收裝置,其中,所述高度調(diào)整機(jī)構(gòu)4包括:上連桿402、下連桿403、前連接桿404和刀具液壓缸410,每一個上連桿402的后端和一個后支撐板401轉(zhuǎn)動連接,每一個下連桿403的后端和一個后支撐板401轉(zhuǎn)動連接,位于同一后支撐板401上的上連桿402位于下連桿403的上方;位于同一后支撐板401上的上連桿402的前端和下連桿403的前端分別與前連接桿404的上、下兩端轉(zhuǎn)動連接;每一個下連桿403的下方設(shè)有一個刀具液壓缸410,刀具液壓缸410的缸體端部轉(zhuǎn)動安裝在后支撐板401上,刀具液壓缸410的缸桿端部轉(zhuǎn)動安裝在下連桿403的中部。
13、上述的基于機(jī)器視覺的自適應(yīng)沙棘采收裝置,其中,所述切割機(jī)構(gòu)5包括:刀架501、夾鋸片電機(jī)502、圓鋸片503、電機(jī)保護(hù)殼504和刀架后端連接部505,刀架501的兩端均安裝有刀架后端連接部505,每一個刀架后端連接部505安裝在一個前連接桿404上;刀架501的前側(cè)安裝有多個夾鋸片電機(jī)502和一個底側(cè)開口的電機(jī)保護(hù)殼504,多個夾鋸片電機(jī)502均位于電機(jī)保護(hù)殼504內(nèi),每一個夾鋸片電機(jī)502的輸出端安裝有一個圓鋸片503,多個圓鋸片503均從電機(jī)保護(hù)殼504的底側(cè)開口處伸出。
14、上述的基于機(jī)器視覺的自適應(yīng)沙棘采收裝置,其中,所述聚枝機(jī)構(gòu)6包括:聚枝板601和聚枝板液壓缸602,兩個聚枝板601對稱設(shè)置在刀架501的兩端且轉(zhuǎn)動安裝在刀架501上,多個夾鋸片電機(jī)502均位于兩個聚枝板601之間,兩個聚枝板液壓缸602分別設(shè)于兩個聚枝板601的外側(cè),聚枝板液壓缸602的缸體端部和刀架501轉(zhuǎn)動連接,聚枝板液壓缸602的缸桿端部和聚枝板601轉(zhuǎn)動連接,兩個聚枝板液壓缸602用于調(diào)節(jié)兩個聚枝板601之間的夾角角度。
15、上述的基于機(jī)器視覺的自適應(yīng)沙棘采收裝置,其中,所述撥枝機(jī)構(gòu)7包括:撥枝輪701、液壓馬達(dá)702、聯(lián)軸器703和軸承座704,每一個撥枝輪支撐桿406的前端安裝有一個軸承座704,位于同一撥枝輪支撐桿406上的軸承座704設(shè)于工業(yè)攝像頭409的后側(cè),撥枝輪701的兩端分別與兩個軸承座704轉(zhuǎn)動連接;液壓馬達(dá)702的輸出端和撥枝輪701的一端通過聯(lián)軸器703傳動連接,液壓馬達(dá)702和電磁閥組通過液壓管路連通。
16、本發(fā)明由于采用了上述技術(shù),使之與現(xiàn)有技術(shù)相比具有的積極效果是:
17、(1)本發(fā)明可同時對兩行沙棘樹進(jìn)行采收,同時配有工業(yè)攝像頭,可通過圖像識別確定樹枝的生長情況、倒伏情況及沙棘果的分布情況,并依據(jù)反饋的數(shù)據(jù)自動調(diào)整左右兩側(cè)聚枝板間的開合角度,刀架的高度和撥枝輪的高度及伸出長度,同時可以通過回轉(zhuǎn)支撐軸承的小幅轉(zhuǎn)動來調(diào)整對沙棘樹的中心位置;
18、(2)本發(fā)明中,左右兩側(cè)的采收裝置完全獨(dú)立動作,可各自根據(jù)所要采收的沙棘樹的狀態(tài)分別獨(dú)立進(jìn)行調(diào)整,該發(fā)明整體結(jié)構(gòu)簡單,采收效率高,采收效果好,智能化程度較高,適合對沙棘果的自動化高效采收。
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!