一種可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法、程序、設(shè)備及存儲介質(zhì)
本發(fā)明屬于穿戴式動作次數(shù)統(tǒng)計,具體涉及一種可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法、程序、設(shè)備及存儲介質(zhì)。
背景技術(shù):
1、基于微機(jī)電系統(tǒng)(mems)(加速度計、陀螺儀為主)的可穿戴動作統(tǒng)計裝置,被廣泛用于人或動物的運(yùn)動分析、室內(nèi)導(dǎo)航、健康監(jiān)護(hù)與管理等方面。一般被統(tǒng)計的動作在持續(xù)運(yùn)動時都具有準(zhǔn)周期性(由于動作幅度、動作跨度很難完全一致,因此不是嚴(yán)格的周期變化),例如行走、奔跑的步數(shù)統(tǒng)計。
2、將裝有加速度計、陀螺儀的數(shù)據(jù)采集裝置佩戴在動作能夠影響到的部分,在佩戴者進(jìn)行上述連續(xù)動作時,加速度、陀螺儀數(shù)據(jù)值隨著時間推移有很明顯的準(zhǔn)周期性變化(由于動作幅度、動作跨度很難完全一致,因此加速度、陀螺儀數(shù)據(jù)不是嚴(yán)格的周期變化),這種準(zhǔn)周期性的變化是由于連續(xù)有節(jié)奏的重復(fù)動作所產(chǎn)生的。現(xiàn)有的動作次數(shù)統(tǒng)計方法主要是基于上述特性開發(fā)的。例如,自相關(guān)分析法、有限狀態(tài)機(jī)法、零速檢測法,以及波峰檢測法等。一般為了消除佩戴者其他動作或者環(huán)境震動引起的假陽性數(shù)據(jù)計入動作次數(shù),上述方法采用判斷觀察窗內(nèi)峰值個數(shù)(動作次數(shù))是否達(dá)到設(shè)定的閾值數(shù)目以決定,如果沒有達(dá)到則不計入動作次數(shù)中。這種方式雖然消除其他動作,或者環(huán)境震動的影響,但也將零散的運(yùn)動次數(shù)排除在計數(shù)之外,即如果實(shí)際動作在觀測窗口內(nèi)的次數(shù)小于閾值數(shù)目,則會漏計。這將不利于獲取更加精確的動作次數(shù)統(tǒng)計,進(jìn)而影響室內(nèi)導(dǎo)航、健康狀態(tài)等信息的偏差。雖然,可以采用更加復(fù)雜的模式識別方法先進(jìn)行動作識別再進(jìn)行動作次數(shù)統(tǒng)計,但是需要計算復(fù)雜度較大,難以在可穿戴設(shè)備上部署。針對上述問題,提出一種更高精度的動作次數(shù)統(tǒng)計方法是有必要的。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的在于針對可穿戴設(shè)備對準(zhǔn)周期行動(例如行走、奔跑的步數(shù)、咀嚼次數(shù)統(tǒng)計)統(tǒng)計易受噪聲干擾,零散動作次數(shù)統(tǒng)計精度不高的問題,提供一種可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法、程序、設(shè)備及存儲介質(zhì)。
2、一種可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法,包括以下步驟:
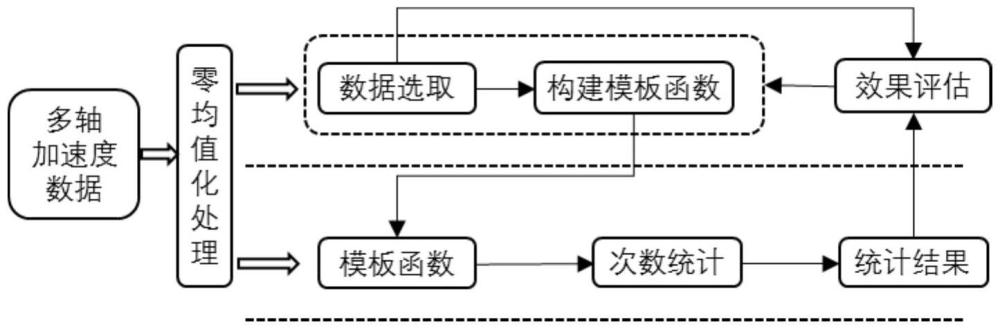
3、步驟1:第一次佩戴穿戴式設(shè)備時,佩戴者在指定時間內(nèi)完成指定動作,通過穿戴式設(shè)備采集數(shù)據(jù),對數(shù)據(jù)執(zhí)行預(yù)處理與零均值化處理;通過穿戴式設(shè)備中存儲的初始模板函數(shù),識別出在佩戴者處于持續(xù)運(yùn)動狀態(tài)期間采集的數(shù)據(jù);
4、步驟2:選取被統(tǒng)計動作在持續(xù)運(yùn)動期間經(jīng)過預(yù)處理與零均值化處理后的數(shù)據(jù),將選取的數(shù)據(jù)構(gòu)建為分析矩陣,求解分析矩陣的奇異值和奇異向量,將第一左奇異向量減去其均值作為更新后的模板函數(shù);根據(jù)更新后的模板函數(shù),確定檢測門限;
5、步驟3:佩戴者在運(yùn)動過程中,穿戴式設(shè)備實(shí)時采集數(shù)據(jù),并對數(shù)據(jù)執(zhí)行預(yù)處理與零均值化處理;對于計算周期內(nèi)處理后的數(shù)據(jù),通過更新后的模板函數(shù)進(jìn)行濾波,并統(tǒng)計濾波后數(shù)據(jù)中滿足檢測門限的波峰與波谷組合數(shù),記為動作發(fā)生次數(shù)。
6、進(jìn)一步地,所述穿戴式設(shè)備中攜帶多軸加速計和初始模板函數(shù),多軸加速計用于采集數(shù)據(jù);所述初始模板函數(shù)具體為:
7、收集多個同類佩戴者在已知持續(xù)運(yùn)動、非持續(xù)運(yùn)動、無運(yùn)動情況下的多軸加速計數(shù)據(jù),形成決策樹,決策樹使用機(jī)器學(xué)習(xí)過程來更新;通過初始模板函數(shù)在新的佩戴者運(yùn)動情況未知條件下,確定所采集的多軸加速計數(shù)據(jù)是否是持續(xù)運(yùn)動期間的數(shù)據(jù)。
8、進(jìn)一步地,所述對數(shù)據(jù)執(zhí)行預(yù)處理與零均值化處理,具體為:
9、根據(jù)多軸加速計采集的加速度數(shù)據(jù),計算合加速度模值,得到x1=[x1(1),x1(2),...,x1(t),...],t為數(shù)據(jù)時域序號;
10、對于合加速度模值數(shù)據(jù)x1進(jìn)行零均值化處理得到零均值數(shù)據(jù)xs;
11、xs=x1-x′1
12、其中,x′1是由x1進(jìn)行均值濾波得到,且濾波窗口長度不小于一次動作時長的4倍。
13、進(jìn)一步地,所述步驟2中選取被統(tǒng)計動作在持續(xù)運(yùn)動期間經(jīng)過預(yù)處理與零均值化處理后的數(shù)據(jù)x1=[x1(1),x1(2),...,x1(l),...,x1(l)],構(gòu)建成m×n維分析矩陣a;其中,m為一個運(yùn)動周期對應(yīng)的數(shù)據(jù)長度,n為所分析的運(yùn)動周期數(shù)量,且n>m,l>m×n。
14、進(jìn)一步地,所述步驟2中選取分析矩陣a的第一左奇異向量v1減去其均值為模板函數(shù)g;
15、
16、檢測門限r(nóng)為:
17、
18、其中,l1(g)和l2(g)為模板函數(shù)g的l1范數(shù)和l2范數(shù);r0為分析矩陣a的第一奇異值與所有奇異值之和的比值。
19、進(jìn)一步地,所述步驟3中對于計算周期內(nèi)預(yù)處理與零均值化處理后的數(shù)據(jù)xs,計算xs與模板函數(shù)g的卷積,得到濾波后數(shù)據(jù)y=[y(1),y(2),...,y(t),...,y(t)];若y(t)<-r,y(t+1)>r,則y(t)與y(t+1)組合記為一次動作發(fā)生次數(shù)。
20、進(jìn)一步地,若佩戴者發(fā)生變更,或穿戴式設(shè)備自評估動作次數(shù)統(tǒng)計結(jié)果低于預(yù)期,則重新執(zhí)行步驟1,重新訓(xùn)練模板函數(shù)。
21、一種計算機(jī)裝置/設(shè)備/系統(tǒng),包括存儲器、處理器及存儲在存儲器上的計算機(jī)程序,所述處理器執(zhí)行所述計算機(jī)程序以實(shí)現(xiàn)上述可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法的步驟。
22、一種計算機(jī)可讀存儲介質(zhì),其上存儲有計算機(jī)程序/指令,該計算機(jī)程序/指令被處理器執(zhí)行時實(shí)現(xiàn)上述可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法的步驟。
23、一種計算機(jī)程序產(chǎn)品,包括計算機(jī)程序/指令,該計算機(jī)程序/指令被處理器執(zhí)行時實(shí)現(xiàn)上述可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法的步驟。
24、本發(fā)明的有益效果在于:
25、本發(fā)明選取被統(tǒng)計動作在持續(xù)運(yùn)動期間的數(shù)據(jù)并構(gòu)建為分析矩陣,利用分析矩陣的奇異向量和奇異值構(gòu)建模板函數(shù),利用模板函數(shù)對采集到的實(shí)時數(shù)據(jù)進(jìn)行模板函數(shù)濾波,并統(tǒng)計濾波后數(shù)據(jù)中滿足門限要求的波峰與波谷組合數(shù),記為動作發(fā)生次數(shù)。本發(fā)明利用模板函數(shù)濾波可以降低其他運(yùn)動對所需要統(tǒng)計動作的影響,能夠準(zhǔn)確地記錄非連續(xù)動作的發(fā)生次數(shù),提高動作統(tǒng)計的準(zhǔn)確性;模板函數(shù)是通過在線數(shù)據(jù)訓(xùn)練得到的,可消除佩戴者個體差異,且可以定期或者根據(jù)用戶指令對動作次數(shù)統(tǒng)計結(jié)果進(jìn)行評估,如低于預(yù)期可重新訓(xùn)練模板函數(shù)。
技術(shù)特征:
1.一種可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法,其特征在于,包括以下步驟:
2.根據(jù)權(quán)利要求1所述的一種可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法,其特征在于:所述穿戴式設(shè)備中攜帶多軸加速計和初始模板函數(shù),多軸加速計用于采集數(shù)據(jù);所述初始模板函數(shù)具體為:
3.根據(jù)權(quán)利要求2所述的一種可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法,其特征在于:所述對數(shù)據(jù)執(zhí)行預(yù)處理與零均值化處理,具體為:
4.根據(jù)權(quán)利要求1所述的一種可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法,其特征在于:所述步驟2中選取被統(tǒng)計動作在持續(xù)運(yùn)動期間經(jīng)過預(yù)處理與零均值化處理后的數(shù)據(jù)x1=[x1(1),x1(2),...,x1(l),...,x1(l)],構(gòu)建成m×n維分析矩陣a;其中,m為一個運(yùn)動周期對應(yīng)的數(shù)據(jù)長度,n為所分析的運(yùn)動周期數(shù)量,且n>m,l>m×n。
5.根據(jù)權(quán)利要求4所述的一種可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法,其特征在于:所述步驟2中選取分析矩陣a的第一左奇異向量v1減去其均值mev1為模板函數(shù)g;
6.根據(jù)權(quán)利要求5所述的一種可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法,其特征在于:所述步驟3中對于計算周期內(nèi)預(yù)處理與零均值化處理后的數(shù)據(jù)xs,計算xs與模板函數(shù)g的卷積,得到濾波后數(shù)據(jù)y=[y(1),y(2),...,y(t),...,y(t)];若y(t)<-r,y(t+1)>r,則y(t)與y(t+1)組合記為一次動作發(fā)生次數(shù)。
7.根據(jù)權(quán)利要求1所述的一種可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法,其特征在于:若佩戴者發(fā)生變更,或穿戴式設(shè)備自評估動作次數(shù)統(tǒng)計結(jié)果低于預(yù)期,則重新執(zhí)行步驟1,重新訓(xùn)練模板函數(shù)。
8.一種計算機(jī)裝置/設(shè)備/系統(tǒng),包括存儲器、處理器及存儲在存儲器上的計算機(jī)程序,其特征在于:所述處理器執(zhí)行所述計算機(jī)程序以實(shí)現(xiàn)權(quán)利要求1至7中任一項所述方法的步驟。
9.一種計算機(jī)可讀存儲介質(zhì),其上存儲有計算機(jī)程序/指令,其特征在于:該計算機(jī)程序/指令被處理器執(zhí)行時實(shí)現(xiàn)權(quán)利要求1至7中任一項所述方法的步驟。
10.一種計算機(jī)程序產(chǎn)品,包括計算機(jī)程序/指令,其特征在于:該計算機(jī)程序/指令被處理器執(zhí)行時實(shí)現(xiàn)權(quán)利要求1至7中任一項所述方法的步驟。
技術(shù)總結(jié)
本發(fā)明屬于穿戴式動作次數(shù)統(tǒng)計技術(shù)領(lǐng)域,具體涉及一種可在線學(xué)習(xí)的穿戴式準(zhǔn)周期性運(yùn)動次數(shù)統(tǒng)計方法、程序、設(shè)備及存儲介質(zhì)。本發(fā)明選取被統(tǒng)計動作在持續(xù)運(yùn)動期間的數(shù)據(jù)并構(gòu)建為分析矩陣,利用分析矩陣的奇異向量和奇異值構(gòu)建模板函數(shù),利用模板函數(shù)對采集到的實(shí)時數(shù)據(jù)進(jìn)行模板函數(shù)濾波,并統(tǒng)計濾波后數(shù)據(jù)中滿足門限要求的波峰與波谷組合數(shù),記為動作發(fā)生次數(shù)。本發(fā)明利用模板函數(shù)濾波可以降低其他運(yùn)動對所需要統(tǒng)計動作的影響,能夠準(zhǔn)確地記錄非連續(xù)動作的發(fā)生次數(shù),提高動作統(tǒng)計的準(zhǔn)確性;模板函數(shù)是通過在線數(shù)據(jù)訓(xùn)練得到的,可消除佩戴者個體差異,且可以定期或者根據(jù)用戶指令對動作次數(shù)統(tǒng)計結(jié)果進(jìn)行評估,如低于預(yù)期可重新訓(xùn)練模板函數(shù)。
技術(shù)研發(fā)人員:戚連剛,宋澤楠,于晟杰,王可南,國強(qiáng)
受保護(hù)的技術(shù)使用者:哈爾濱工程大學(xué)
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!