一種FES騎行控制方法、系統、電子設備及計算機程序產品與流程
本發明涉及康復訓練方法,具體為一種fes騎行控制方法、系統、電子設備及計算機程序產品。
背景技術:
1、脊髓損傷是外界直接或間接損害脊柱相應階段結構及其功能,會對患者造成不同程度的下肢運動障礙,甚者會造成患者的下肢完全癱瘓。如果不及時治療,癱瘓后下肢的肌肉會逐漸萎縮。這可能對患者的泌尿系統、呼吸以及心臟造成不良影響,甚至可能引發痙攣和疼痛等問題。《中國脊髓損傷者生活質量及疾病負擔調研報告2023版》指出,中國脊髓損傷患者數量激增。因此脊髓損傷患者的康復是目前需要迫切解決的問題。
2、康復醫療是以鍛煉為主的治療手段,廣泛應用于腦卒中偏癱患者的恢復治療中,對于患者肢體功能鍛煉具有十分顯著的功效。但偏癱患者喪失了肢體運動能力,出現肌肉萎縮癥狀,這增加了康復醫療的難度,而功能性電刺激(fes)腳踏車系統的引入對于康復醫療工作的開展起到了幫助作用,對患者肢體運動功能的恢復以及生活自理能力的改善均具有積極影響作用。
3、fes腳踏車康復訓練系統的硬件部分主要包括主控計算機,腳踏車,功能性電刺激儀、傳感器以及輔助電機等核心組件。fes腳踏車康復訓練系統實現康復目標的關鍵在于康復訓練方法的實施,而康復訓練方法的實施則很大程度上依賴于康復訓練系統的控制策略。控制策略的設計充分考慮患者的病情,緊密結合醫學康復理論,從而確保患者在訓練過程中不會受到額外的傷害。由于人體肌肉系統的復雜性,fes腳踏車康復訓練系統通常被視作一個非線性且時變系統,因此如何緊密結合醫學康復理論,設計正確的控制策略,提升系統的穩定性和抗干擾性備受國內外研究人員關注,提出了一系列相關控制策略例如:神經網絡、模糊控制以及深度學習等。
4、然而目前的控制策略面臨以下兩個問題:第一,在騎行康復訓練過程中電極需要經過多次測試才能放置在最優位置,可能造成一定的機械困難;第二,目前諸多fes腳踏車康復訓練系統引入飛輪裝置提高騎行的平穩性,但是考慮到脊髓損傷人群的腿部肌肉處于無力狀態,通常采用外部制動裝置來控制所需速度,造成能量的損失與消耗。
技術實現思路
1、本發明的目的在于提供一種fes騎行控制方法、系統、電子設備及計算機程序產品,將飛輪、電磁離合器與自行車的曲柄相結合,針對脊髓損傷患者的股四頭肌,提供一種fes騎行控制方法,解決了在基于fes技術的固定騎行康復運動中,受制于電刺激驅動肌肉的力矩有限、肌肉作為非線性元件難以精準控制,同時長時連續電刺激易引發肌肉疲勞等技術難點,基于fes技術的固定騎行康復運動的現實效果仍然有待提升的問題,相比傳統的電刺激治療方法,本發明在保證康復需求的前提下,有效地降低了電刺激強度,提高了能量的利用率,達到節能的效果。
2、為了解決上述技術問題,本發明提供如下技術方案:
3、一種fes騎行控制方法,其步驟包括:
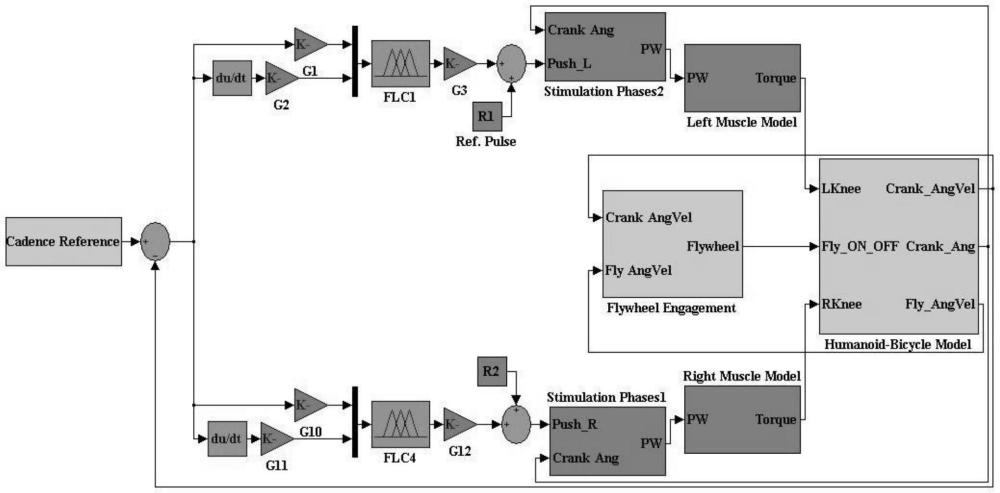
4、確定復騎行運動所需的騎行節奏并通過自行車上的傳感器獲取實際騎行節奏反饋信號;
5、將實際騎行節奏反饋信號與所需騎行節奏進行比較,并將產生的誤差信號提供給控制器以相應地改變刺激脈沖寬度;
6、根據刺激脈沖寬度和曲柄的角度確定曲柄的扭矩;
7、基于實時獲取的曲柄的角速度和飛輪的角速度利用sugeno型的模糊推理方法控制電動離合器,使得曲柄的角速度達到曲柄的扭矩所需角速度,進行康復騎行運動。
8、根據上述技術方案,所述控制器采用mamdani型的模糊推理方法改變脈沖寬度;所述控制器具體執行步驟包括:
9、以膝關節實際節奏曲線和膝關節預定義節奏曲線之間的角度誤差e和膝關節實際節奏曲線和膝關節預定義節奏曲線之間的角度誤差的變化量△e作為輸入變量;以電刺激信號的脈沖寬度△l作為輸出變量;
10、將輸入變量e和△e進行模糊化,得到誤差e的模糊集合和誤差變化量△e的模糊集合;
11、結合系統特性和控制需求,設置mamdani型的模糊推理方法的模糊控制規則;
12、計算誤差e的模糊集合和誤差變化量△e的模糊集合與模糊控制規則的推理結果,確定輸入變量和輸出變量模糊關系,以獲得模糊輸出變量脈沖寬度△l。
13、其中,一般情況下,通過隸屬度關系計算出輸入或輸出變量對模糊集合的隸屬度,這個過程稱為模糊化,可采用高斯型隸屬函數。
14、根據上述技術方案,所述誤差e的模糊集合為a={nb1,ns1,z1,ps1,pb1},其中nb1表示負大,ns1表示負小,z1表示零,ps1表示正小,pb1表示正大;所述誤差e的模糊集合對應的模糊子集論域為{-1,-0.8,-0.6,-0.4,
15、-0.2,0,0.2,0.4,0.6,0.8,1};
16、所述誤差變化量△e的模糊集合為b={nb2,ns2,z2,ps2,pb2},其中nb2表示負大,ns2表示負小,z2表示零,ps2表示正小,pb2表示正大,所述誤差變化量△e的模糊集合對應的模糊子集論域為{-1,-0.8,-0.6,-0.4,-0.2,0,0.2,0.4,0.6,0.8,1}。
17、根據上述技術方案,所述mamdani型的模糊推理方法的模糊控制規則為:
18、
19、表中,nbl、nsl、zl、psl和pbl共同構成輸出變量脈沖寬度△l的模糊合集,nbl表示負大,nsl表示負小,zl表示零,psl表示正小,pbl表示正大,所述脈沖寬度△l的模糊合集對應的模糊子集論域為{-1,-0.8,-0.6,-0.4,-0.2,0,0.2,0.4,0.6,0.8,1}。
20、電動離合器的作用是根據實際情況完成飛輪與曲柄的嚙合和分離;具體實施邏輯如下:當曲柄的角速度超過所需速度時,即系統中的能量過多,并且飛輪的角速度低于曲柄的角速度,則離合器將飛輪與曲柄接合以減慢運動;
21、另一方面,當曲柄的角速度低于所需速度時,即需要輔助,同時如果飛輪的角速度高于曲柄的角速度,則進行接合以輔助和加速運動。飛輪與曲柄嚙合,吸收系統中多余的能量,將其存儲為動能,并減緩運動;此外,飛輪在加載動能后,與曲柄嚙合,將其能量釋放到系統中,并加速運動。
22、其中,自行車曲柄的角度α的模糊集合為{pr,pl},其中pr表示曲柄角度指示騎行者當前正在積極踩踏右側的曲柄,pl表示曲柄角度指示騎行者當前正在積極踩踏左側的曲柄,可通過確定自行車曲柄的角度α確和刺激脈沖寬度確定曲柄的扭矩。
23、根據上述技術方案,所述sugeno型的模糊推理方法執行步驟包括:
24、輸入信號為曲柄的角速度ω和飛輪的角速度ω,輸出信號信號為電動離合器控制信號;所述電動離合器控制信號包括電動離合器啟動信號和電動離合器停止信號;
25、對輸入信號曲柄的角速度ω和飛輪的角速度ω進行模糊化,確定曲柄的角速度ω模糊集合和飛輪的角速度ω的模糊集合;
26、構建離合控制模糊規則;
27、計算曲柄的角速度ω模糊集合和飛輪的角速度ω的模糊集合觸發離合控制模糊規則的推理結果;
28、通過加權平均去模糊化方法,將觸發離合控制模糊規則產生的推理結果更改為介于0和1之間的清晰值;
29、將清晰值與閾值進行比較,若清晰值大于等于閾值則清晰值轉換為1,輸出信號為電動離合器啟動信號,以激活電動離合器;
30、若清晰值小于閾值則清晰值轉換為0,輸出信號為電動離合器停止信號,以停用電動離合器。
31、根據上述方案,所述曲柄的角速度ω的模糊集合c={veryslow,slow,fast,veryfast};所述角速度ω的模糊集合對應的模糊子集為{0,100,200,300,400,500,600};
32、所述飛輪的角速度ω的模糊集合d={veryslow,slow,fast,veryfast},所述飛輪的角速度ω的模糊集合對應的模糊子集為{0,100,200,300,400,500,600}。
33、根據上述技術方案,所述離合控制模糊規則:
34、
35、表中,crankvel表示曲柄的角速度ω的模糊集合,flyvel表示飛輪的角速度ω的模糊集合,off表示電動離合器停止信號,on表示電動離合器啟動信號。
36、另一實施例,一種fes騎行控制系統,包括:
37、信號獲取模塊,用于確定復騎行運動所需的騎行節奏并通過自行車上的傳感器獲取實際騎行節奏反饋信號;
38、mamdani推理模塊,用于將實際騎行節奏反饋信號與所需騎行節奏進行比較,并將產生的誤差信號提供給控制器以相應地改變刺激脈沖寬度;
39、曲柄扭矩確定模塊,確定根據刺激脈沖寬度和曲柄的角度確定曲柄的扭矩;
40、離合控制模塊,基于實時獲取的曲柄的角速度和飛輪的角速度利用sugeno型的模糊推理方法控制電動離合器,使得曲柄的角速度達到曲柄的扭矩所需速度,進行康復騎行運動。
41、另一實施例,一種電子設備,包括:至少一個處理器;以及,與所述至少一個處理器通信連接的存儲器;其中,所述存儲器存儲有可被所述至少一個處理器執行的指令,所述指令被所述至少一個處理器執行,以使所述至少一個處理器能夠執行上述方法。
42、另一實施例,一種計算機程序產品,包括計算機程序/指令,所述計算機程序/指令被處理器執行時實現上述方法。
43、本發明公開了一種fes騎行控制方法、系統、電子設備及計算機程序產品,其具備的有益效果如下:
44、1、該fes騎行控制方法,將飛輪、電磁離合器與自行車的曲柄相結合,針對脊髓損傷患者的股四頭肌,提出了一種全新的閉環控制方法,相比傳統的電刺激治療方法,在保證康復需求的前提下,有效地降低了電刺激強度,提高了能量的利用率,達到節能的效果。同時,也達到了所需的康復效果。
45、2、該fes騎行控制方法,模糊控制方法能夠處理輸入數據中的不確定性和噪聲,使得系統在面對各種復雜情況時仍能保持穩定的性能。通過結合飛輪和電磁離合器,系統能夠自動吸收和釋放能量,應對騎行過程中的能量波動,提高了系統的魯棒性和可靠性。
46、3、該fes騎行控制方法,模糊控制方法使得系統能夠根據實際情況動態調整電刺激參數和飛輪/離合器的狀態,從而提供更加平滑、舒適的騎行體驗,通過減少不必要的肌肉疲勞和不適感,提高了患者的參與度和康復積極性。
- 還沒有人留言評論。精彩留言會獲得點贊!