一種自動測量消融針針距平行度的消融系統和裝置的制作方法
本申請涉及醫療器械智慧醫療領域,尤其涉及一種自動測量消融針針距平行度的消融系統和裝置。
背景技術:
1、高壓電脈沖在醫療領域的腫瘤消融應用中具有保留血管和神經功能的獨特優點,其應用越來越受歡迎,作為高壓脈沖發生器的應用部分的一次性使用陡脈沖消融針需要至少兩針、至多六針的組合使用,并要求針與針之間的距離在一定的范圍內且針之間基本保持平行。
2、現在的消融針針距測量是手動測量,在ct影像或超聲影像下測量,測量過程不方便也比較耗時,多次ct測量也會增加射線輻射量;尤其是插針位置反復調整時,需要反復測量。另外,在確認消融針間是否平行時需要多點測量,如果不平行,調整針距后需要反復測量,費時費力,效率比較低。
技術實現思路
1、有鑒于此,本申請提供一種自動測量消融針針距平行度的消融系統和裝置,以解決消融手術中手動測量消融針針距和消融針針距平行度的效率低、過程繁瑣的問題。
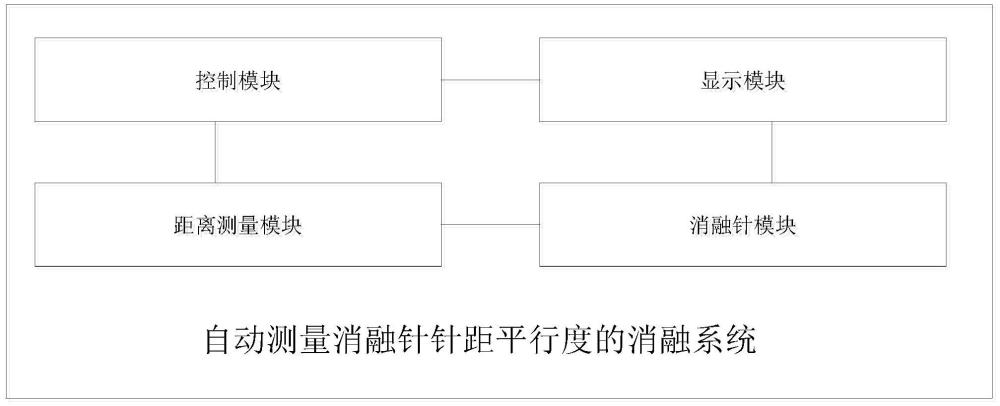
2、本申請第一方面提供一種自動測量消融針針距平行度的消融系統,所述系統包括控制模塊,顯示模塊,距離測量模塊以及消融針模塊;
3、所述消融針模塊包含至少兩個消融針和對應的消融針手柄,所述消融針手柄上集成了所述距離測量模塊的激光發送模塊和激光接收模塊,其中,所述激光發送模塊包含n個激光發射傳感器,用于發送激光脈沖信號,所述激光接收模塊包含n個激光接收傳感器用于接收激光脈沖信號,n>1;
4、所述距離測量模塊包含激光發送模塊和激光接收模塊,用于根據控制模塊發送的測量指令確定待測量的目標消融針,通過所述激光發送模塊控制第一目標消融針發送m組激光脈沖信號,并通過所述激光接收模塊控制第二目標消融針接收所述激光脈沖信號,其中,m>1;
5、確定所述激光脈沖信號的傳輸時間差,并通過所述傳輸時間差確定所述第一目標消融針和第二目標消融針的m個距離值;
6、所述顯示模塊用于顯示測量過程中的各個狀態信息以及處理結果,并且提供用戶操作流程中需要選擇的各個選擇項,并根據用戶的選擇進行對應的處理;
7、所述控制模塊包含用于邏輯和算法控制的處理器以及為其他模塊提供的接口,向距離測量模塊發送測量指令,并根據所述距離測量模塊返回的所述距離值確定所述第一目標消融針和第二目標消融針的平行度,其中,所述測量指令包含消融針編號。
8、可選的,所述系統還包括針身份編解碼模塊;
9、所述針身份編解碼模塊用于通過asic芯片集成編解碼所需的軟硬件代碼和電路,使所述針身份編解碼模塊和所述控制模塊之間通過預定的算法協議識別消融針的唯一性編碼,并通過所述唯一性編碼對消融針的信息進行記錄、識別和判斷。
10、可選的,所述系統還包括負載模塊;
11、所述負載模塊包含若干個不同電阻值的負載電阻,通過所述負載電阻組成電阻陣列模擬人體各個組織的阻抗等級;
12、在各個阻抗等級下通過所述距離測量模塊生成測量數據,確定各個阻抗等級下所述消融針的針距及平行度。
13、可選的,所述系統還包括系統電源模塊;
14、所述系統電源模塊包含線電源供電系統接口電路、安規保護電路、整流電路,emc/emi濾波防護電路,并向其他模塊提供各種不同類型的電源。
15、可選的,所述向其他模塊提供交互接口以及驅動控制電路包括:
16、向所述顯示模塊提供通信接口、供電接口;
17、向所述距離測量模塊提供距離測量傳感器通信收發接口以及驅動電路;
18、向所述消融針模塊提供消融針身份識別接口、所述消融針的驅動控制電路,以及編碼解碼協議和算法。
19、本申請第二方面提供一種自動測量消融針針距平行度的消融裝置,所述裝置包括:
20、消融針單元,包含至少兩個消融針和對應的消融針手柄,所述消融針手柄上集成了所述距離測量模塊的激光發送模塊和激光接收模塊,其中,所述激光發送模塊包含n個激光發射傳感器,用于發送激光脈沖信號,所述激光接收模塊包含n個激光接收傳感器用于接收激光脈沖信號,n>1;
21、激光脈沖信號發送接收單元,用于根據控制模塊發送的測量指令確定待測量的目標消融針,通過所述激光發送模塊控制第一目標消融針發送m組激光脈沖信號,并通過所述激光接收模塊控制第二目標消融針接收所述激光脈沖信號,其中,m>1;
22、確定所述激光脈沖信號的傳輸時間差,并通過所述傳輸時間差確定所述第一目標消融針和第二目標消融針的m個距離值;
23、針距和平行度確定單元,用于向距離測量模塊發送測量指令,并根據所述距離測量模塊返回的距離值確定所述消融針的針距及平行度,所述測量指令包含消融針編號。
24、可選的,所述裝置還包括:
25、消融針識別判斷單元,用于通過asic芯片集成編解碼所需的軟硬件代碼和電路,使所述針身份編解碼模塊和所述控制模塊之間通過預定的算法協議識別消融針的唯一性編碼,并通過所述唯一性編碼對消融針的信息進行記錄、識別和判斷。
26、可選的,所述裝置還包括:
27、負載單元,用于若干個不同電阻值的負載電阻組成電阻陣列,根據所述電阻陣列模擬人體各個組織的阻抗等級;
28、在各個阻抗等級下通過所述距離測量模塊生成測量數據,確定各個阻抗等級下所述消融針的針距及平行度。
29、可選的,所述系統還包括:
30、電源提供單元,用于向其他模塊提供各種不同類型的電源。
31、在本申請提供的實施例中,預先在各個消融針手柄上集成用于測量距離的激光發送模塊和激光接收模塊,當確定待測量的第一、第二目標消融針后,通過第一目標消融針發送激光脈沖信號,再通過第二目標消融針的激光接收模塊接收該激光脈沖信號,然后通過該激光脈沖信號的傳輸時間差確定第一目標消融針和第二目標消融針的至少兩個距離值;最后通過距離值的差值確定第一、第二目標消融針的平行度。這解決了手動測量消融針針距和消融針針距平行度的效率低、過程繁瑣的問題,大大提高了插針后針距測量和消融針間平行度確認的效率,可以節省主刀醫生的時間和精力,使醫生更加專注于如何布針、插針。
技術特征:
1.一種自動測量消融針針距平行度的消融系統,其特征在于,所述系統包括控制模塊,顯示模塊,距離測量模塊以及消融針模塊;
2.根據權利要求1所述的系統,其特征在于,所述系統還包括針身份編解碼模塊;
3.根據權利要求1所述的系統,其特征在于,所述系統還包括負載模塊;
4.根據權利要求1所述的系統,其特征在于,所述系統還包括系統電源模塊;
5.根據權利要求2所述的系統,其特征在于,所述向其他模塊提供交互接口以及驅動控制電路包括:
6.一種自動測量消融針針距平行度的消融裝置,其特征在于,所述裝置包括:
7.根據權利要求6所述的裝置,其特征在于,所述裝置還包括:
8.根據權利要求6所述的裝置,其特征在于,所述裝置還包括:
9.根據權利要求6所述的裝置,其特征在于,所述系統還包括:
技術總結
本發明適用于醫療器械智慧醫療領域,提供了一種自動測量消融針針距平行度的消融系統和裝置。在本實施例中,預先在各個消融針手柄上集成用于測量距離的激光發送模塊和激光接收模塊,當確定待測量的第一、第二目標消融針后,通過第一目標消融針發送激光脈沖信號,再通過第二目標消融針的激光接收模塊接收該激光脈沖信號,然后通過該激光脈沖信號的傳輸時間差確定第一目標消融針和第二目標消融針的至少兩個距離值;最后通過距離值的差值確定第一、第二目標消融針的平行度。這解決了手動測量消融針針距和消融針針距平行度的效率低、過程繁瑣的問題。
技術研發人員:陳永剛,郭林忠,竇杰,余小恒
受保護的技術使用者:杭州睿笛生物科技有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!