調彎導管適配器和手術機器人的制作方法
本申請涉及醫療,特別是涉及調彎導管適配器和手術機器人。
背景技術:
1、心血管介入或者外周血管介入手術中,由于目標血管位置或者目標病灶位置往往都在血管比較迂曲的位置,或者在僅通過導絲支撐無法達到的區域,因此通常需要一個可調彎導管做為指引導管(guiding?catheter)輔助器械到達目標血管位置或者病灶位置。器械在可調彎導管內輸送的過程中,為了達到目標血管位置或者病灶位置,需要經常調整可調彎導管的頭端彎曲角度以及沿軸向旋轉可調彎導管,從而調整可調彎導管頭端在立體空間的位置。
2、相關技術中,用于血管介入手術機器人的器械操作盒安裝于動力單元上方,造成機器人從動端部分厚度大,導致器械無法完全貼近患者血管入口,增加了手術難度。
技術實現思路
1、基于此,有必要針對手術機器人存在增加了手術難度的問題,提供一種調彎導管適配器。
2、一種調彎導管適配器,用于操縱調彎導管,所述調彎導管適配器包括:
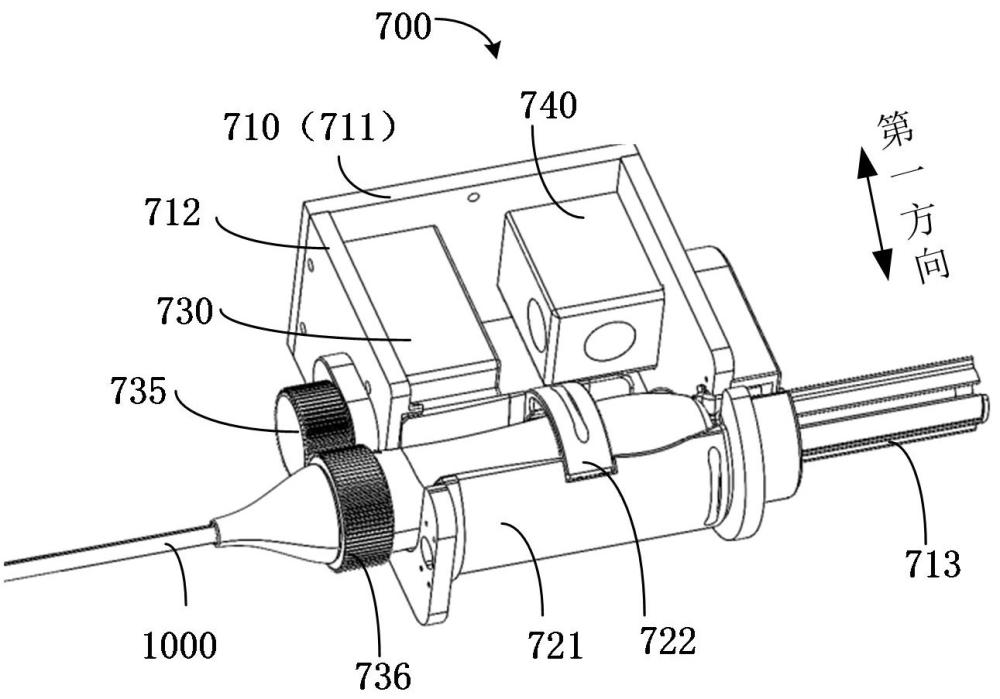
3、適配座,沿第一方向的一端構造有間隔的調彎連接部和旋轉連接部,所述第一方向與重力方向相交;
4、固定套,轉動連接于所述適配座,且與所述調彎連接部沿所述第一方向布置;所述固定套用于固定調彎導管;
5、調彎傳動單元,連接于所述調彎連接部,且與所述調彎連接部沿所述第一方向布置;所述調彎傳動單元的動力輸出端用于與所述調彎導管的調彎手輪連接;
6、旋轉傳動單元,連接于所述旋轉連接部,且與所述旋轉連接部沿所述第一方向布置;所述旋轉傳動單元的動力輸出端與所述固定套連接。
7、在其中一個實施例中,所述調彎連接部包括調彎連接孔,所述調彎傳動單元連接于所述調彎連接孔;
8、所述旋轉連接部包括旋轉連接孔,所述旋轉傳動單元連接于所述旋轉連接孔。
9、在其中一個實施例中,所述調彎連接部還包括連接于所述調彎連接孔的調彎聯軸器,所述調彎傳動單元連接于所述調彎聯軸器;
10、所述旋轉連接部還包括連接于所述旋轉連接孔的旋轉聯軸器,所述旋轉傳動單元連接于所述旋轉聯軸器。
11、在其中一個實施例中,所述調彎聯軸器和所述旋轉聯軸器中的至少一者構造有多個動力連接端。
12、在其中一個實施例中,所述調彎傳動單元包括嚙合傳動的第一調彎輸入件和第一調彎輸出件,所述第一調彎輸入件和所述第一調彎輸出件的軸向相交;所述第一調彎輸入件連接于所述調彎連接部,所述第一調彎輸出件用于與所述調彎手輪連接。
13、在其中一個實施例中,所述調彎傳動單元包括第二調彎輸入件和第二調彎輸出件,所述第二調彎輸入件與所述第一調彎輸出件同軸連接,所述第二調彎輸出件用于與所述調彎手輪連接。
14、在其中一個實施例中,所述調彎傳動單元包括第三調彎輸入件和第三調彎輸出件,所述第三調彎輸入件與所述第二調彎輸出件同軸連接;所述第三調彎輸出件用于與所述調彎手輪連接。
15、在其中一個實施例中,所述第三調彎輸出件與所述調彎手輪中的一者構造有嚙合凸起,另一者構造有用于與所述嚙合凸起嚙合傳動的嚙合槽。
16、在其中一個實施例中,所述旋轉傳動單元包括嚙合傳動的第一旋轉輸入件和第一旋轉輸出件,所述第一旋轉輸入件和所述第一旋轉輸出件的軸向相交;所述第一旋轉輸入件連接于所述旋轉連接部,所述第一旋轉輸出件連接于所述固定套。
17、在其中一個實施例中,所述旋轉傳動單元包括第二旋轉輸入件和第二旋轉輸出件,所述第二旋轉輸入件與所述第一旋轉輸出件同軸連接,所述第二旋轉輸出件連接于所述固定套。
18、在其中一個實施例中,所述旋轉傳動單元包括第三旋轉輸入件和第三旋轉輸出件,所述第三旋轉輸入件與所述第二旋轉輸出件同軸連接;所述第三旋轉輸出件與所述固定套連接。
19、在其中一個實施例中,所述調彎導管適配器還包括轉動連接于所述固定套的固定鎖,所述固定鎖處于鎖定位置時,所述固定鎖與所述固定套配合圍出用于卡接所述調彎導管的卡接槽。
20、在其中一個實施例中,所述固定套和所述固定鎖分別構造有第一連接部和第一配合部,所述固定鎖處于所述鎖定位置時,所述固定套和所述固定鎖通過所述第一連接部與所述第一配合部連接。
21、在其中一個實施例中,所述固定套和所述固定鎖中的至少一者構造有第一轉動孔,另一者連接有第一轉動部,所述第一轉動部轉動連接于所述第一轉動孔的孔壁。
22、在其中一個實施例中,所述適配座構造有旋轉支撐槽,所述固定套轉動連接于所述旋轉支撐槽的槽壁;和/或,
23、所述調彎導管適配器還包括輸送導軌,所述輸送導軌構造有導向槽;和/或,
24、所述調彎導管適配器還包括輸送導軌和輸送保護罩,所述輸送保護罩罩設于所述輸送導軌,二者配合圍出輸送腔。
25、一種手術機器人,包括動力輸出裝置以及如上所述的調彎導管適配器。
26、上述調彎導管適配器,調彎傳動單元的動力輸出端與調彎導管的調彎手輪連接,從而能夠調節調彎導管的彎曲角度;旋轉傳動單元的動力輸出端與固定套連接,從而能夠帶動固定套和調彎導管同步繞軸向轉動。通過將調彎傳動單元以及旋轉傳動單元分別與對應的連接部沿第一方向布置,使得調彎導管適配器可以與動力輸出裝置沿第一方向布置,也即調彎導管適配器可以連接在動力輸出裝置沿第一方向的側面,調彎導管適配器和動力輸出裝置并非是上下布置。如此,可以降低手術機器人的整體厚度,有效縮短導管與病灶位置之間的豎直距離,使得器械更容易貼近患者的血管入口,降低了手術難度,且能夠提升手術機器人的使用便利性。
技術特征:
1.一種調彎導管適配器,其特征在于,用于操縱調彎導管(1000),所述調彎導管適配器包括:
2.根據權利要求1所述的調彎導管適配器,其特征在于,所述調彎連接部(7111)包括調彎連接孔(7112),所述調彎傳動單元(730)連接于所述調彎連接孔(7112);
3.根據權利要求2所述的調彎導管適配器,其特征在于,所述調彎連接部(7111)還包括連接于所述調彎連接孔(7112)的調彎聯軸器(7113),所述調彎傳動單元(730)連接于所述調彎聯軸器(7113);
4.根據權利要求3所述的調彎導管適配器,其特征在于,所述調彎聯軸器(7113)和所述旋轉聯軸器(7116)中的至少一者構造有多個動力連接端(7117)。
5.根據權利要求1至4任一項所述的調彎導管適配器,其特征在于,所述調彎傳動單元(730)包括嚙合傳動的第一調彎輸入件(731)和第一調彎輸出件(732),所述第一調彎輸入件(731)和所述第一調彎輸出件(732)的軸向相交;所述第一調彎輸入件(731)連接于所述調彎連接部(7111),所述第一調彎輸出件(732)用于與所述調彎手輪(1100)連接。
6.根據權利要求5所述的調彎導管適配器,其特征在于,所述調彎傳動單元(730)包括第二調彎輸入件(733)和第二調彎輸出件(734),所述第二調彎輸入件(733)與所述第一調彎輸出件(732)同軸連接,所述第二調彎輸出件(734)用于與所述調彎手輪(1100)連接。
7.根據權利要求6所述的調彎導管適配器,其特征在于,所述調彎傳動單元(730)包括第三調彎輸入件(735)和第三調彎輸出件(736),所述第三調彎輸入件(735)與所述第二調彎輸出件(734)同軸連接;所述第三調彎輸出件(736)用于與所述調彎手輪(1100)連接。
8.根據權利要求7所述的調彎導管適配器,其特征在于,所述第三調彎輸出件(736)與所述調彎手輪(1100)中的一者構造有嚙合凸起(1110),另一者構造有用于與所述嚙合凸起(1110)嚙合傳動的嚙合槽(7361)。
9.根據權利要求1至4任一項所述的調彎導管適配器,其特征在于,所述旋轉傳動單元(740)包括嚙合傳動的第一旋轉輸入件(741)和第一旋轉輸出件(742),所述第一旋轉輸入件(741)和所述第一旋轉輸出件(742)的軸向相交;所述第一旋轉輸入件(741)連接于所述旋轉連接部(7114),所述第一旋轉輸出件(742)連接于所述固定套(721)。
10.根據權利要求9所述的調彎導管適配器,其特征在于,所述旋轉傳動單元(740)包括第二旋轉輸入件(743)和第二旋轉輸出件(744),所述第二旋轉輸入件(743)與所述第一旋轉輸出件(742)同軸連接,所述第二旋轉輸出件(744)連接于所述固定套(721)。
11.根據權利要求10所述的調彎導管適配器,其特征在于,所述旋轉傳動單元(740)包括第三旋轉輸入件(745)和第三旋轉輸出件(746),所述第三旋轉輸入件(745)與所述第二旋轉輸出件(744)同軸連接;所述第三旋轉輸出件(746)與所述固定套(721)連接。
12.根據權利要求1至4任一項所述的調彎導管適配器,其特征在于,所述調彎導管適配器還包括轉動連接于所述固定套(721)的固定鎖(722),所述固定鎖(722)處于鎖定位置時,所述固定鎖(722)與所述固定套(721)配合圍出用于卡接所述調彎導管(1000)的卡接槽(7211)。
13.根據權利要求12所述的調彎導管適配器,其特征在于,所述固定套(721)和所述固定鎖(722)分別構造有第一連接部(7212)和第一配合部(7222),所述固定鎖(722)處于所述鎖定位置時,所述固定套(721)和所述固定鎖(722)通過所述第一連接部(7212)與所述第一配合部(7222)連接。
14.根據權利要求12所述的調彎導管適配器,其特征在于,所述固定套(721)和所述固定鎖(722)中的至少一者構造有第一轉動孔(7213),另一者連接有第一轉動部,所述第一轉動部轉動連接于所述第一轉動孔(7213)的孔壁。
15.根據權利要求1至4任一項所述的調彎導管適配器,其特征在于,所述適配座(710)構造有旋轉支撐槽(7121),所述固定套(721)轉動連接于所述旋轉支撐槽(7121)的槽壁;和/或,
16.一種手術機器人,其特征在于,包括動力輸出裝置以及如權利要求1至15任一項所述的調彎導管適配器。
技術總結
本申請涉及一種調彎導管適配器和手術機器人。調彎導管適配器中的調彎傳動單元的動力輸出端與調彎導管的調彎手輪連接,能夠調節調彎導管的彎曲角度;旋轉傳動單元的動力輸出端與固定套連接,能夠帶動固定套和調彎導管同步繞軸向轉動。通過將調彎傳動單元以及旋轉傳動單元分別與對應的連接部沿第一方向布置,使得調彎導管適配器可以與動力輸出裝置沿第一方向布置,也即調彎導管適配器可以連接在動力輸出裝置沿第一方向的側面,調彎導管適配器和動力輸出裝置并非是上下布置。以降低手術機器人的整體厚度,有效縮短導管與病灶位置之間的豎直距離,使得器械更容易貼近患者的血管入口,降低手術難度,且提升了手術機器人的使用便利性。
技術研發人員:葛存旺,劉文明,陳豪,吳鋼
受保護的技術使用者:上海術濟客醫療科技有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!