一種具有動態平衡控制的液壓爬模架結構及其使用方法與流程
本發明屬于建筑施工,具體而言,涉及一種具有動態平衡控制的液壓爬模架結構及其使用方法。
背景技術:
1、隨著高層建筑的不斷發展,傳統爬模架在施工過程中存在以下問題:傳統爬模架在調整模板高度及位置時,通常依賴于手動操作,如使用葫蘆、千斤頂等簡單機械裝置。這種方法不僅耗時耗力,而且在調整過程中容易造成模板位置不準確,需要反復調整,從而降低了施工效率,此外,由于人工操作的局限性,模板的升降速度較慢,影響了整個施工進度;
2、傳統爬模架的設計往往較為單一,難以適應不同建筑結構和復雜地形的施工需求。例如,在曲面結構、不規則形狀或地形起伏較大的施工現場,傳統爬模架的適用性受到限制,這導致在復雜條件下施工時,需要額外的時間和成本來定制或修改爬模架,以滿足施工要求。
技術實現思路
1、本發明實施例提供了一種具有動態平衡控制的液壓爬模架結構及其使用方法,解決了傳統爬模架由于地形問題,導致爬模架結構需要進行更改,以保證平衡的問題。
2、鑒于上述問題,本發明提出的技術方案是:
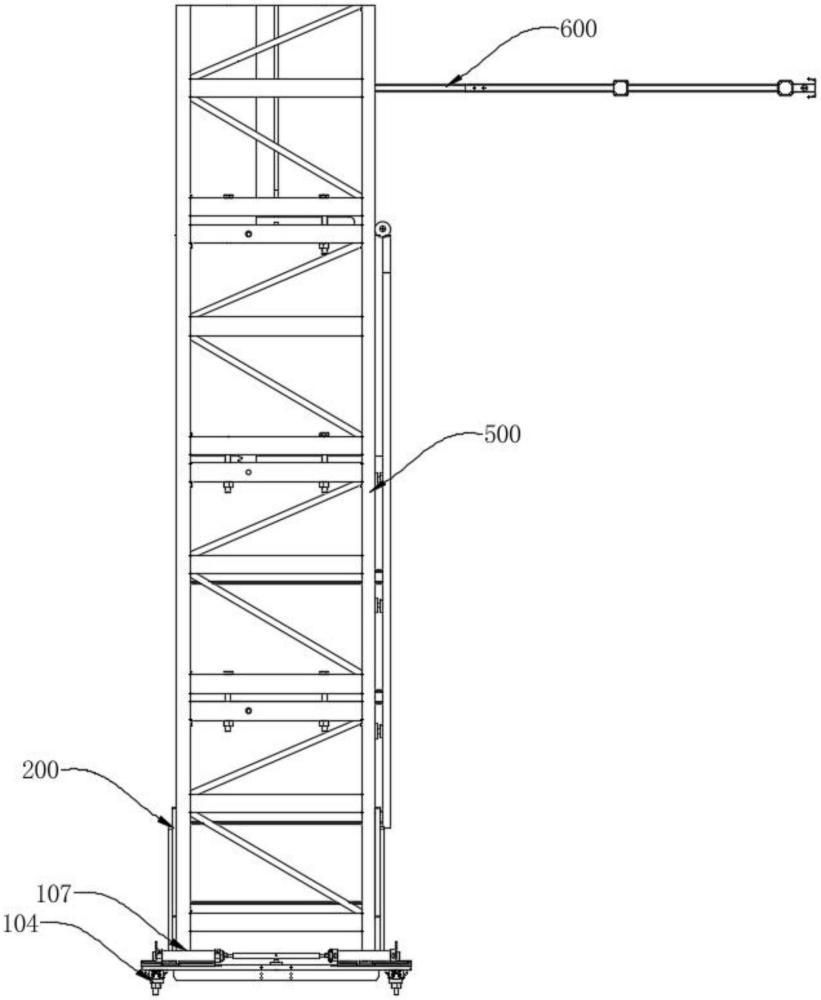
3、本發明提供一種具有動態平衡控制的液壓爬模架結構,包括調平底架、水平儀和爬模架,所述調平底架包括安裝板和連接板,所述安裝板的底部兩側設置有豎向軌道,所述豎向軌道的底部固定有底板,所述安裝板的上表面左右兩端均設置有固定板,所述固定板的底部兩側設置有橫向軌道,所述連接板設置在所述固定板的前側,所述水平儀設置在在所述安裝板的上表面;
4、調平機構,所述調平機構設置在所述連接板與所述固定板之間,所述調平機構包括電機、齒輪和齒條,所述齒輪設置在所述電機的輸出端,所述齒條設置在所述齒輪的一側,且所述連接板的后側開設有與所述齒條和所述齒輪適配的安裝槽;
5、調平系統,所述調平系統利用來自所述水平儀監測的水平數據,監測所述爬模架的平衡,并控制所述調平機構進行調平工作。
6、作為本發明的一種優選技術方案,所述安裝板的底部固定有與所述豎向軌道適配的滑塊,所述固定板的底部固定有與所述橫向軌道適配的滑塊,所述安裝板底部的所述滑塊內側設置電動輪,電動輪與所述豎向軌道活動連接,靠近兩個所述固定板的底部一側均安裝有氣缸,所述氣缸外接氣泵,所述氣缸的前端設置有推桿,所述推桿的兩端分別與兩個所述氣缸螺絲連接。
7、作為本發明的一種優選技術方案,所述電機的內側設置有背板,所述電機與所述背板之間設置有安裝架,所述安裝架螺絲連接在所述固定板的外側,所述背板嵌設在所述固定板的內側,所述電機的輸出端貫穿所述固定板和所述背板與所述齒輪傳動連接,所述齒輪與所述齒條嚙合,所述齒條與所述連接板之間設置有螺絲進行固定。
8、作為本發明的一種優選技術方案,所述固定板為t型設計,所述連接板與所述爬模架的底部螺栓連接,所述電動輪為輪轂電機,且所述安裝板和所述底板均利用螺栓安裝在地面上,所述安裝板上的螺栓呈等距陣列設計,進行承重,且所述電機的輸出端與所述齒輪之間設置有單向離合器。
9、作為本發明的一種優選技術方案,所述調平系統包括數據采集模塊、數據分析模塊、狀態判斷模塊、調平監控模塊和控制模塊;
10、所述數據采集模塊利用傳感器對所述爬模架的平衡狀態進行監測,包括傾斜角度、水平位置、受力點壓力和位移;
11、所述數據分析模塊基于所述數據采集模塊采集到的所述爬模架相關數據進行處理分析,得到爬模架的實際情況與原定數據的差值;
12、所述狀態判斷模塊基于所述數據分析模塊分析出的差值對所述爬模架的使用狀態進行判斷;
13、所述調平監控模塊用于在所述調平底架進行調平工作時,實時對所述爬模架的狀態進行監控;
14、所述控制模塊用于控制所述調平底架的調平工作。
15、作為本發明的一種優選技術方案,所述數據采集模塊包括傾斜監測單元、壓力監測單元、位移監測單元和水平監測單元;
16、所述傾斜監測單元用于實時監測爬模架的傾斜角度,在爬模架的關鍵位置安裝傾角傳感器進行監測;
17、所述壓力監測單元用于監測所述爬模架的支撐點受力情況,在受力點安裝壓力傳感器進行監測;
18、所述位移監測單元用于監測所述爬模架的水平和垂直位移,在所述爬模架的前、后、左和右四個方向安裝位移傳感器;
19、所述水平監測單元利用所述水平儀監測所述爬模底架的水平狀態。
20、作為本發明的一種優選技術方案,所述數據分析模塊包括傾斜分析單元、高度差計算單元和壓力差計算單元;
21、所述傾斜分析單元用于比較所述傾斜監測單元監測的實時數據與預設的安全傾斜閾值差,判斷所述爬模架是否傾斜;
22、所述高度差計算單元利用于對所述爬模架的傾斜角度與所述爬模架的支撐點的高度差;
23、所述壓力差計算單元用于計算所述壓力監測單元監測的實施壓力數據與初始壓力數據的差值,并與其他支撐點的壓力傳感器數值之間進行比對,判斷是否存在支撐點受力不均的情況。
24、作為本發明的一種優選技術方案,所述狀態判斷模塊包括正常狀態、預警狀態和調整狀態;
25、正常狀態為所述數據采集模塊的監測數據處于預設的所述爬模架的安全范圍內,則認為其處于正常狀態;
26、預警狀態為所述數據采集模塊的監測數據接近預設的安全閾值,所述調平系統發出預警;
27、調整狀態為當所述數據采集顯示爬模架的傾斜角度、受力或位移超出安全范圍時,所述調平系統判斷所述爬模架需要進行調平。
28、另一方面,一種具有動態平衡控制的液壓爬模架結構的使用方法,包括以下步驟:
29、s1,根據施工圖紙安裝爬模架,利用附墻支座將爬模架的一側與建筑結構連接,并預先在爬模架的底部安裝調平底架;
30、s2,利用調平系統對爬模架的平衡狀態進行實時監測,根據監測的數據控制調平底架對爬模架進行調平工作;
31、s3,利用傳感器對爬模架的平衡狀態進行全方位的監測,系統根據監測的數據對爬模底架進行前、后、左、右、上和下的數據差值進行計算,確定調整方案,根據差值對調平底架進行調節,直到爬模架達到平衡狀態;
32、s4,并在調節的過程中對爬模架進行實時監控,基于調平的實時數據對爬架平衡數值進行同步計算,調整調平數值,系統同步更換調整方案,保持爬模架的平衡;
33、s5,施工完成后,拆除模板。
34、相對于現有技術,本發明的有益效果是:
35、(1)本發明通過集成傳感器和全方位的調節結構,能夠實現爬模架在多個方向上的精準位移調整,多方向的調平機構使得爬模架能夠適應復雜多變的施工環境,并結合實時監測和動態平衡的功能,保證了爬模架的穩定性,減少傾斜的風險;
36、(2)本發明通過自動化的調平過程,減少了人工干預,并對調整過程進行監控,及時調整調平方案,能夠快速響應并執行調整方案,并利用簡單的算法和控制指令,提高了工作效果,降低了對操作人員的技能要求。
37、上述說明僅是本發明技術方案的概述,為了能夠更清楚了解本發明的技術手段,而可依照說明書的內容予以實施,并且為了讓本發明的上述和其它目的、特征和優點能夠更明顯易懂,以下特舉本發明的具體實施方式。
- 還沒有人留言評論。精彩留言會獲得點贊!