一種掃地機器人智能防撞機構的制作方法
本技術涉及掃地機器人領域,具體為一種掃地機器人智能防撞機構。
背景技術:
1、掃地機器人,又稱自動打掃機、智能吸塵、機器人吸塵器等,是智能家用電器的一種,能憑借一定的人工智能,自動在房間內完成地板清理工作。
2、掃地機器人一般采用刷掃和真空方式,將地面雜物先吸納進入自身的垃圾收納盒,從而完成地面清理的功能,現有智能掃地機器人在工作時常會碰撞到其他地方,如碰撞到桌椅、墻角上等,由于長時間多次碰撞可能會造成智能掃地機器人內部因為碰撞產生的沖擊力發生損壞的問題,從而導致智能掃地機器人的出現故障或清理工作停滯等。
3、為此本實用新型提出了一種掃地機器人智能防撞機構來解決上述提出的技術問題。
技術實現思路
1、本實用新型的目的在于提供一種掃地機器人智能防撞機構,以解決上述背景技術中提出的問題。
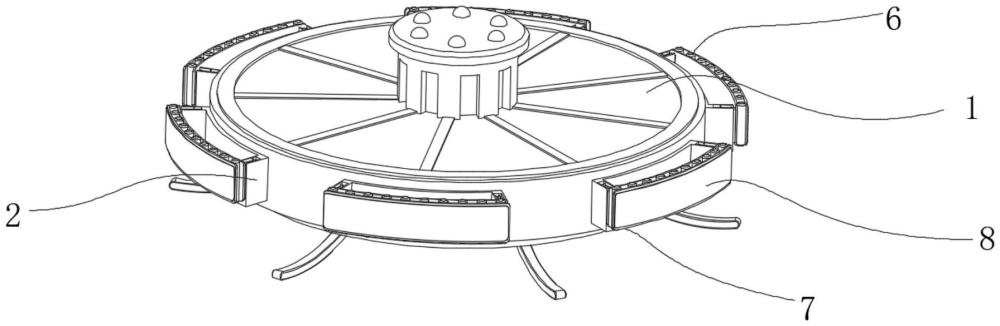
2、為實現上述目的,本實用新型提供如下技術方案:一種掃地機器人智能防撞機構,所述掃地機器人智能防撞機構包括:掃地機器人本體,掃地機器人本體側面設置有安裝板,安裝板表面開設有放置槽;
3、緩沖板,緩沖板內側面設置有固定板,緩沖板外表面設置有緩沖氣囊,緩沖氣囊表面設置有放置板,放置板表面設置有預警模塊,預警模塊與掃地機器人本體電性連接。
4、優選的,所述安裝板設置有多組,多組安裝板關于掃地機器人本體有規律的呈圓形排列,安裝板利用定位螺栓固定連接在掃地機器人本體的側面。
5、優選的,所述放置槽端面開設有限位槽,放置槽側面設置有導向塊,導向塊呈方向板狀結構,導向塊關于放置槽對稱分布。
6、優選的,所述固定板側面開設有導向槽,導向槽開設有兩組,兩組導向槽關于固定板對稱分布,導向塊可插入進導向槽內。
7、優選的,所述固定板表面開設有凹槽,凹槽內設置有立板,立板內插入有限位桿,限位桿表面套設有牽引彈簧,牽引彈簧一端固定連接在限位桿的表面,牽引彈簧另一端固定連接在立板的側面,限位桿一端可插入進限位槽內。
8、優選的,所述緩沖氣囊設置有多組,多組緩沖氣囊均固定連接在緩沖板的表面,放置板呈弧形板狀結構,預警模塊固定連接在放置板的表面。
9、與現有技術相比,本實用新型的有益效果是:
10、本實用新型提出的掃地機器人智能防撞機構,在使用時當利用掃地機器人本體對地面進行清掃時,當掃地機器人本體與桌椅、墻腳等時首先可借助緩沖氣囊的設置降低掃地機器人本體受到磕碰的沖擊力,然后在利用放置板表面設置的預警模塊,當預警模塊與桌椅、墻腳等發生接觸時可像掃地機器人本體內發出預警信息使掃地機器人本體進行調轉方向。
技術特征:
1.一種掃地機器人智能防撞機構,其特征在于:所述掃地機器人智能防撞機構包括:掃地機器人本體(1),掃地機器人本體(1)側面設置有安裝板(2),安裝板(2)表面開設有放置槽(3);
2.根據權利要求1所述的一種掃地機器人智能防撞機構,其特征在于:所述安裝板(2)設置有多組,多組安裝板(2)關于掃地機器人本體(1)有規律的呈圓形排列,安裝板(2)利用定位螺栓固定連接在掃地機器人本體(1)的側面。
3.根據權利要求1所述的一種掃地機器人智能防撞機構,其特征在于:所述放置槽(3)端面開設有限位槽(9),放置槽(3)側面設置有導向塊(10),導向塊(10)呈方向板狀結構,導向塊(10)關于放置槽(3)對稱分布。
4.根據權利要求1所述的一種掃地機器人智能防撞機構,其特征在于:所述固定板(5)側面開設有導向槽(11),導向槽(11)開設有兩組,兩組導向槽(11)關于固定板(5)對稱分布,導向塊(10)可插入進導向槽(11)內。
5.根據權利要求1所述的一種掃地機器人智能防撞機構,其特征在于:所述固定板(5)表面開設有凹槽(12),凹槽(12)內設置有立板(13),立板(13)內插入有限位桿(14),限位桿(14)表面套設有牽引彈簧(15),牽引彈簧(15)一端固定連接在限位桿(14)的表面,牽引彈簧(15)另一端固定連接在立板(13)的側面,限位桿(14)一端可插入進限位槽(9)內。
6.根據權利要求1所述的一種掃地機器人智能防撞機構,其特征在于:所述緩沖氣囊(6)設置有多組,多組緩沖氣囊(6)均固定連接在緩沖板(4)的表面,放置板(7)呈弧形板狀結構,預警模塊(8)固定連接在放置板(7)的表面。
技術總結
本技術涉及掃地機器人技術領域,具體為一種掃地機器人智能防撞機構,包括:掃地機器人本體側面設置有安裝板,安裝板表面開設有放置槽,緩沖板內側面設置有固定板,緩沖板外表面設置有緩沖氣囊,緩沖氣囊表面設置有放置板,放置板表面設置有預警模塊,預警模塊與掃地機器人本體電性連接;有益效果為:本技術提出的掃地機器人智能防撞機構,在使用時當利用掃地機器人本體對地面進行清掃時,當掃地機器人本體與桌椅、墻腳等時首先可借助緩沖氣囊的設置降低掃地機器人本體受到磕碰的沖擊力,然后在利用放置板表面設置的預警模塊,當預警模塊與桌椅、墻腳等發生接觸時可像掃地機器人本體內發出預警信息使掃地機器人本體進行調轉方向。
技術研發人員:黃啟超,莊雅妮,樂亞元,謝國云
受保護的技術使用者:東莞美熠科技有限公司
技術研發日:20240913
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!