一種橋梁掛籃用自動行走方法、系統、設備及介質與流程
本發明涉及橋梁掛籃施工,具體涉及一種橋梁掛籃用自動行走方法、系統、設備及介質。
背景技術:
1、掛籃是橋梁等大型混凝土建筑懸臂施工中的主要設備之一,按結構形式可分為桁架式、斜拉式、型鋼式及混合式4種。所謂掛籃施工,是指澆筑較大跨徑的懸臂梁橋時,采用吊籃方法,就地分段懸臂作業,它不需要架設支架和不使用大型吊機。
2、掛籃系統是一套能行走移動的裝備,掛籃是一個空中施工平臺,通過吊桿掛在桁架的外伸端上,逐段澆筑施工,當本節梁段施工完成后,解除掛籃約束,桁架帶動掛籃向前移動一個梁段,進行下一梁段施工,如此循環直至懸臂梁段澆筑全部完成。
3、傳統掛籃的行走過程依靠人工用手拉葫蘆拖拽,實現向前移動,近年來用于掛籃的行走的裝置逐漸增多,但現有技術主要還是依靠人工控制液壓站進而控制油缸移動,實現掛籃的行走,缺乏自動化的手段,導致掛籃施工的效率一直較低。
4、公開號為cn113502759b的中國專利,公開了一種掛籃系統桁架及軌道自動行走裝置,通過在桁架與工字型軌道之間設置有前后掛輪,當桁架自動升起時,通過前后掛輪將工字型軌道完全抬起;通過固定在桁架上的鋼絲繩卷筒單元驅動工字型軌道相對桁架移動,工字型軌道移動到位后桁架自動下降放下工字型軌道,人工將工字型軌道位置校正并固定在已澆筑的梁段上后,桁架在工字型軌道上相對移動到指定位置,然后采用錨固螺桿將桁架固定在梁段上,從而實現桁架及工字型軌道的自動行走。但是在桁架自動行走的過程中,需要涉及到液壓千斤頂、鋼絲繩卷筒、錨固螺桿等多個設備,使得該自動行走過程較為繁瑣,依然影響掛籃施工的效率;
5、因而,我們提出一種行走過程更加簡潔的方法。
技術實現思路
1、本發明的目的在于提供一種橋梁掛籃用自動行走方法、系統、設備及介質,其具有行走過程更加簡潔的特點。
2、本發明通過以下技術方案實現:
3、一種橋梁掛籃用自動行走方法,具體包括:
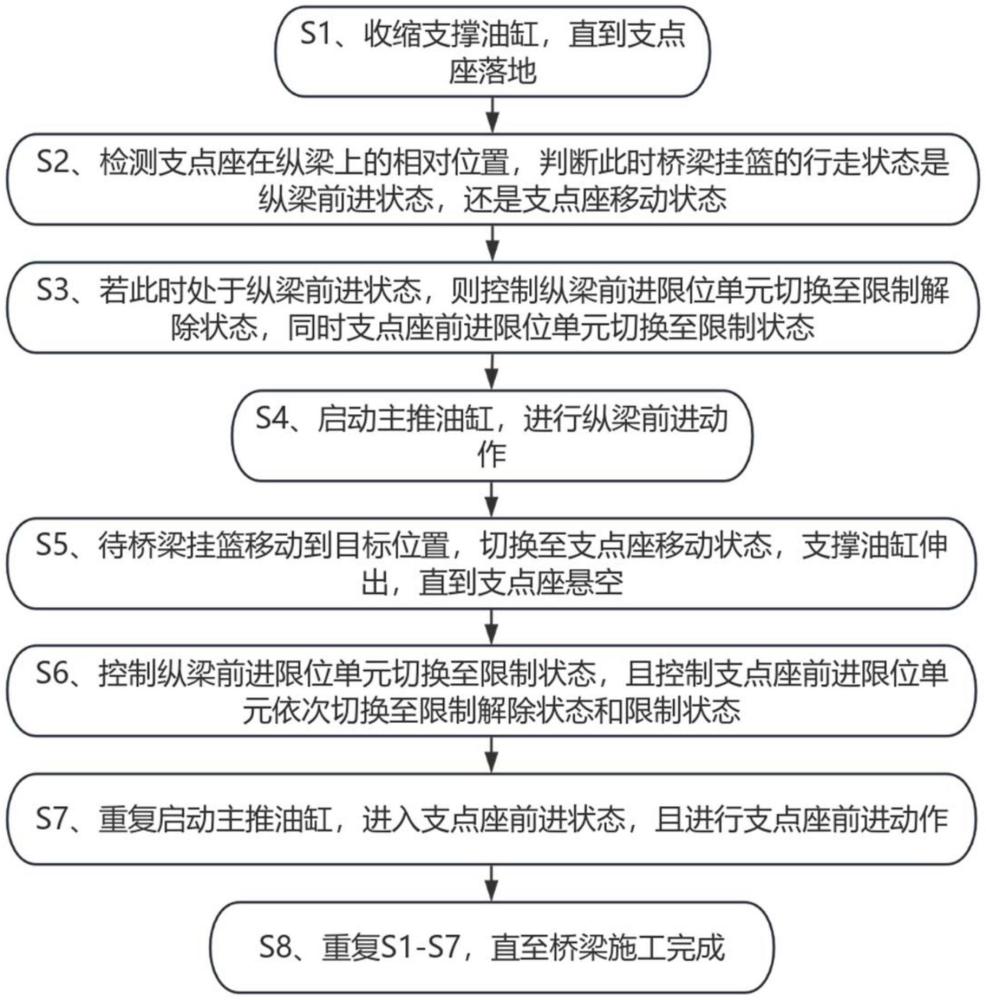
4、s1、收縮支撐油缸,直到支點座落地;
5、s2、檢測支點座在縱梁上的相對位置,判斷此時橋梁掛籃的行走狀態是縱梁前進狀態,還是支點座移動狀態;
6、s3、若此時處于縱梁前進狀態,則控制縱梁前進限位單元切換至限制解除狀態,同時支點座前進限位單元切換至限制狀態;
7、s4、啟動主推油缸,進行縱梁前進動作;
8、s5、待橋梁掛籃移動到目標位置,切換至支點座移動狀態,支撐油缸伸出,直到支點座懸空;
9、s6、控制縱梁前進限位單元切換至限制狀態,且控制支點座前進限位單元依次切換至限制解除狀態和限制狀態;
10、s7、重復啟動主推油缸,進入支點座前進狀態,且進行支點座前進動作;
11、s8、重復s1-s7,直至橋梁施工完成。
12、進一步的,所述s2采用激光測距儀用于確定支點座在縱梁上的相對位置。
13、進一步的,所述s2采用圖像識別設備用于確定支點座在縱梁上的相對位置。
14、一種橋梁掛籃用自動行走系統,包括支點座、支點座前進限位單元和縱梁前進限位單元;所述支點座的尾端與支點座前進限位單元固定連接,支點座內與主推油缸的固定端鉸接,所述主推油缸的伸縮端從支點座的頭端伸出后,與縱梁前進限位單元鉸接;
15、所述支點座、支點座前進限位單元和縱梁前進限位單元的頂部均用于放置縱梁,且支點座前進限位單元和縱梁前進限位單元,能夠限制縱梁和支點座的前進狀態。
16、進一步的,所述支點座前進限位單元包括第一殼體,以及安裝在第一殼體內的第一換向油缸、第一換向擋板和第一限位塊;所述第一殼體的頂部用于放置縱梁,第一殼體與支點座固定連接,第一殼體內固定設有與縱梁相垂直的第一銷軸;所述第一銷軸的軸身轉動設置有第一限位塊;所述第一限位塊的頂部位于縱梁內,第一限位塊的底部位于第一換向擋板板面的換向通道內,該換向通道設為直角z形;所述第一換向擋板與第一換向油缸的伸縮端固定連接,第一換向油缸的伸縮方向與縱梁之間對應垂直。
17、進一步的,所述支點座前進限位單元上安裝有用于檢測第一限位塊傾斜狀態的第一傾斜傳感器。
18、進一步的,所述縱梁前進限位單元包括第二殼體,以及安裝在第二殼體內的第二換向油缸、第二換向擋板和第二限位塊;所述第二殼體的頂部用于放置縱梁,第二殼體與主推油缸的伸縮端鉸接,第二殼體內固定設有與縱梁相垂直的第二銷軸;所述第二銷軸的軸身轉動設置有第二限位塊;所述第二限位塊的頂部位于縱梁內,第二限位塊的底部位于第二換向擋板板面的換向通道內,該換向通道設為直角z形;所述第二換向擋板與第二換向油缸的伸縮端固定連接,第二換向油缸的伸縮方向與縱梁之間對應垂直。
19、進一步的,所述縱梁前進限位單元上安裝有用于檢測第二限位塊傾斜狀態的第二傾斜傳感器。
20、一種電子設備,包括:處理器、存儲器和總線,所述存儲器存儲有所述處理器可執行的機器可讀指令,當電子設備運行時,所述處理器與所述存儲器之間通過所述總線進行通信,所述機器可讀指令被所述處理器運行時執行上述自動行走方法的步驟。
21、一種計算機可讀存儲介質,所述計算機可讀存儲介質上存儲有計算機程序,所述計算機程序被處理器運行時執行上述自動行走方法的步驟。
22、本發明的技術方案至少具有如下優點和有益效果:
23、本發明公開了一種橋梁掛籃用自動行走方法、系統、設備及介質,通過兩個限位單元的互相配合工作,讓主推油缸只進行伸縮這一種動作,即可實現支點座或縱梁的前進運動,從而簡化了橋梁掛籃自動行走的過程步驟,進而提高橋梁掛籃自動行走的效率;
24、另外,采用激光測距儀或圖像識別設備,能夠準確獲得支點座的位置,從而為自動行走方法的后續流程提供數據基礎,完善自動化行走的整個過程;而兩個傾斜傳感器用于檢測第一限位塊和第二限位塊的傾斜姿態,同樣為自動行走方法的后續流程提供數據基礎,利于提高自動行走方法的自動化程度。
技術特征:
1.一種橋梁掛籃用自動行走方法,其特征在于:具體包括:
2.根據權利要求1所述的橋梁掛籃用自動行走方法,其特征在于:所述s2采用激光測距儀用于確定支點座(1)在縱梁(7)上的相對位置。
3.根據權利要求1所述的橋梁掛籃用自動行走方法,其特征在于:所述s2采用圖像識別設備用于確定支點座(1)在縱梁(7)上的相對位置。
4.一種橋梁掛籃用自動行走系統,包括支點座(1)、支點座前進限位單元(3)和縱梁前進限位單元(4);所述支點座(1)的尾端與支點座前進限位單元(3)固定連接,支點座(1)內與主推油缸(2)的固定端鉸接,所述主推油缸(2)的伸縮端從支點座(1)的頭端伸出后,與縱梁前進限位單元(4)鉸接;
5.根據權利要求4所述的橋梁掛籃用自動行走系統,其特征在于:所述支點座前進限位單元(3)包括第一殼體(31),以及安裝在第一殼體(31)內的第一換向油缸(32)、第一換向擋板(33)和第一限位塊(34);所述第一殼體(31)的頂部用于放置縱梁(7),第一殼體(31)與支點座(1)固定連接,第一殼體(31)內固定設有與縱梁(7)相垂直的第一銷軸;所述第一銷軸的軸身轉動設置有第一限位塊(34);所述第一限位塊(34)的頂部位于縱梁(7)內,第一限位塊(34)的底部位于第一換向擋板(33)板面的換向通道內,該換向通道設為直角z形;所述第一換向擋板(33)與第一換向油缸(32)的伸縮端固定連接,第一換向油缸(32)的伸縮方向與縱梁(7)之間對應垂直。
6.根據權利要求5所述的橋梁掛籃用自動行走系統,其特征在于:所述支點座前進限位單元(3)上安裝有用于檢測第一限位塊(34)傾斜狀態的第一傾斜傳感器(5)。
7.根據權利要求4所述的橋梁掛籃用自動行走系統,其特征在于:所述縱梁前進限位單元(4)包括第二殼體(41),以及安裝在第二殼體(41)內的第二換向油缸(42)、第二換向擋板(43)和第二限位塊(44);所述第二殼體(41)的頂部用于放置縱梁(7),第二殼體(41)與主推油缸(2)的伸縮端鉸接,第二殼體(41)內固定設有與縱梁(7)相垂直的第二銷軸;所述第二銷軸的軸身轉動設置有第二限位塊(44);所述第二限位塊(44)的頂部位于縱梁(7)內,第二限位塊(44)的底部位于第二換向擋板(43)板面的換向通道內,該換向通道設為直角z形;所述第二換向擋板(43)與第二換向油缸(42)的伸縮端固定連接,第二換向油缸(42)的伸縮方向與縱梁(7)之間對應垂直。
8.根據權利要求7所述的橋梁掛籃用自動行走系統,其特征在于:所述縱梁前進限位單元(4)上安裝有用于檢測第二限位塊(44)傾斜狀態的第二傾斜傳感器(6)。
9.一種電子設備,包括:處理器、存儲器和總線,所述存儲器存儲有所述處理器可執行的機器可讀指令,當電子設備運行時,所述處理器與所述存儲器之間通過所述總線進行通信,所述機器可讀指令被所述處理器運行時執行如權利要求1-3所述的自動行走方法的步驟。
10.一種計算機可讀存儲介質,所述計算機可讀存儲介質上存儲有計算機程序,所述計算機程序被處理器運行時執行如權利要求1-3所述的自動行走方法的步驟。
技術總結
一種橋梁掛籃用自動行走方法、系統、設備及介質,涉及橋梁掛籃施工技術領域,包括:收縮支撐油缸,直到支點座落地;檢測支點座在縱梁上的相對位置,判斷此時橋梁掛籃的行走狀態是縱梁前進狀態,還是支點座移動狀態;若此時處于縱梁前進狀態,則控制縱梁前進限位單元切換至限制解除狀態,同時支點座前進限位單元切換至限制狀態;啟動主推油缸,進行縱梁前進動作;待橋梁掛籃移動到目標位置,切換至支點座移動狀態,支撐油缸伸出,直到支點座懸空;控制縱梁前進限位單元切換至限制狀態,且控制支點座前進限位單元依次切換至限制解除狀態和限制狀態;重復啟動主推油缸,進入支點座前進狀態,且進行支點座前進動作;其具有行走過程更加簡潔的特點。
技術研發人員:李有山,代俊儒,李海鷗,李志清
受保護的技術使用者:四川省交通建設集團有限責任公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!